






-
PI控制与PR控制
PI是直流信号控制器;PR是交流控制器。
PI控制器对于交流信号的控制性能差,对直流信号的跟踪性能好,直流信号增益无穷。因此DCDC变换中多采用PI控制,而在交流中也可以通过DQ坐标变换,将需要控制的交流信号变换为直流信号,再用直流控制器PI控制旋转坐标系下的d轴分量与q轴分量,从而间接控制交流量的效果。
PR控制的传递函数形式为
该传递函数的幅频响应,是在谐振频率的频率点增益无穷大,且没有相位滞后。可以设计谐振频率等于电网的角频率
,使电网基波信号增益无穷大而其他频段增益小,从而应用在交流电路的控制中。
-
准PR控制器
为了提高PR控制器抵抗网侧频率干扰的能力,对PR控制器进行改进,改进后的传递函数如下所示:
其中为截止频率,代表控制器跟踪参考信号的响应速度。
比例增益系数Kp和谐振增益系数Kr主要影响控制器的增益和相位裕度,截止频率主要影响谐振频率
处的带宽,调节Kp、Kr可以优化系统的动态性能和稳态性能,调节
可以改善系统的抗干扰能力。

-
调Kp,Kr,wc
调节PR控制器参数kp和kr,系统的根轨迹如图5所示,其中0.01≤kp≤2,100≤kr≤700。
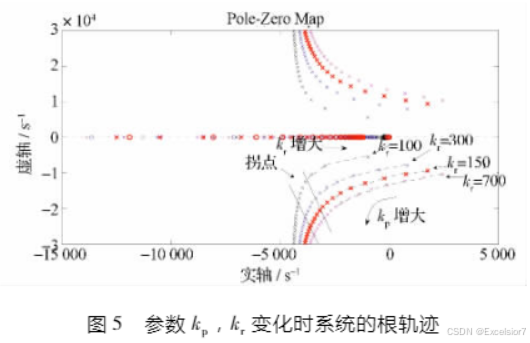
系统的共轭极点随着kp的增大,由右半平面进入左半平面并远离虚轴,稳定性变强(如图5中每条虚线连接的极点为保持kr不变,极点随kp变化的过程)。但过了拐点之后,随着kp的继续增大,系统的共轭极点距离虚轴的距离基本保持不变。不同的kr对应的极点随kp变化会形成图5中的各条虚线,从图中可以看出,随着kr的增大,系统的共轭极点向虚轴靠近,超过一定的范围,系统极点会进入右半平面,变得不稳定。
kr只与系统在谐振点的开环增益成正比,kr越大,系统的稳态精度越高,响应速度越快。因此可以根据系统稳态精度的要求,结合稳定条件先设计kr值。如取kr=500时,如果系统需要更高的稳态精度时,就可以增大kr,选择kr=500右边的虚线来设计控制器的参数。但是由上文分析可知,过大的kr会使系统不稳定。所以kr的选取要综合考虑稳态精度和稳定裕量,在保证系统具有足够稳定裕量的前提下选择较大的kr,提高系统的稳态精度。
在确定kr的取值后,kp变化会产生如图5所示的虚线连接的多个极点。共轭极点的阻尼比同极点与零点的夹角有关,从图中可以看出,随着kp的增大,阻尼比先增大,但过了拐点(如图5中标注)之后,极点的阻尼随kp增大而减小。较大的阻尼可以减小系统的超调,衰减震荡。所以选择拐点位置作为系统的极点设置,选择合理的kp值。此时,共轭极点有较大的阻尼,同时极点离虚轴距离足够远,既保证了系统有较强的稳定性,又使系统有较快的响应速度。
ωc 取 5 ~ 15 rad / s ,即可有效减小电网频率波动的影响。
上文引用自[1]王亮,王冰,黄存荣.基于比例谐振控制器的逆变控制系统设计与参数整定[J].科学技术与工程,2013,13(28):8268-8273+8279.
摘自袁雷的《现代永磁同步电机控制原理及MATLAB仿真》的第三章
举例的参数:Kp=1000不能太大,Kr=100等几百的值;wc=2*pi*2等5 ~ 15 rad / s的值;wo=2*pi*50;
声明,本文章是我刚接触PSCAD模型中的PR控制调参,在知网,CSDN,知乎等平台搜集的一些资料总结的心得,用作学习记录,方便自己日后查看,还请批评指正。
————————————————
原文链接:https://blog.csdn.net/xht2403267701/article/details/130550076
原文链接:https://blog.csdn.net/mz__zm/article/details/132662393

















 458
458

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









