






定位+电流闭环强拖+ 角度渐变切换+ 速度电流双闭环+ 无传感器角度估算SMO+ PLL 控制方式 Simulink 仿真模型 (Matlab2020b版本)以及教授模型搭建
这是一种常用的无传感FOC电机控制算法,掌握这种算法的基本原理,并有仿真模型在手,就可以用它来指导实践中的程序调试,做到实际项目不盲目调试。
模型特点:
1. 所有模块都做到了模块化,各个模块分区清楚,结构清晰。
2. 所有电机和控制参数均在m文件中体现,变量注释清楚,随用随改。
3. 速度环和电流环PI参数均实现自动整定。
4. 模型采用标幺值系统。
5. 各状态切换使用stateflow,模型结构清晰。
6.通用表贴和内嵌式电机。
ID:35499695448666010
旋转的世界

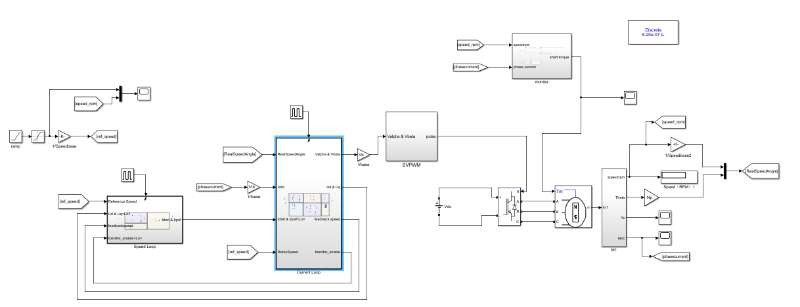
无传感FOC电机控制算法是一种常用的电机控制算法,它通过定位、电流闭环强拖、角度渐变切换、速度电流双闭环、无传感器角度估算SMO、PLL控制方式等技术手段实现对电机的精确控制。本文将介绍该算法的基本原理,并使用Matlab2020b版本中的Simulink仿真模型进行验证和教授模型搭建。
无传感FOC电机控制算法的模型具有以下特点:
-
模块化设计:该算法的各个模块都采用了模块化设计,使得各模块之间分区清晰,结构清晰,方便扩展和修改。
-
参数灵活调整:所有电机和控制参数均在m文件中体现,变量注释清楚,可以根据实际需求随时进行调整和修改,提高了算法的适用性。
-
自动整定:速度环和电流环的PI参数采用自动整定方式,可以根据电机的实际工作状态和负载情况自动调整参数,提高了控制精度和稳定性。
-
采用标幺值系统:模型采用标幺值系统,使得不同电机和控制参数之间可以进行统一比较和分析,方便算法的应用和推广。
-
使用stateflow进行状态切换:模型中的各种状态切换使用stateflow实现,使得模型结构清晰,易于理解和调试。
-
通用表贴和内嵌式电机:该算法适用于各种类型的电机,包括通用表贴和内嵌式电机,在不同的应用场景下都具有较好的适应性。
掌握无传感FOC电机控制算法的基本原理,并使用Simulink仿真
【相关代码,程序地址】:http://fansik.cn/695448666010.html
















 616
616











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









