







往期文章
RK3588+docker+YOLOv5部署:https://blog.csdn.net/FJN110/article/details/149673049
RK3588测试NPU和RKNN函数包装https://blog.csdn.net/FJN110/article/details/149669753
RK3588刷机:https://blog.csdn.net/FJN110/article/details/149669404
以及深度学习部署工程师1~31主要学习tensorRT、cmake、docker、C++基础、语义分割、目标检测、关键点识别、RTSP推流、3D模型部署、车牌检测于识别项目、人脸属性分析(年龄、性别、名称、是否佩戴口罩)等知识
好的进入本节课程:
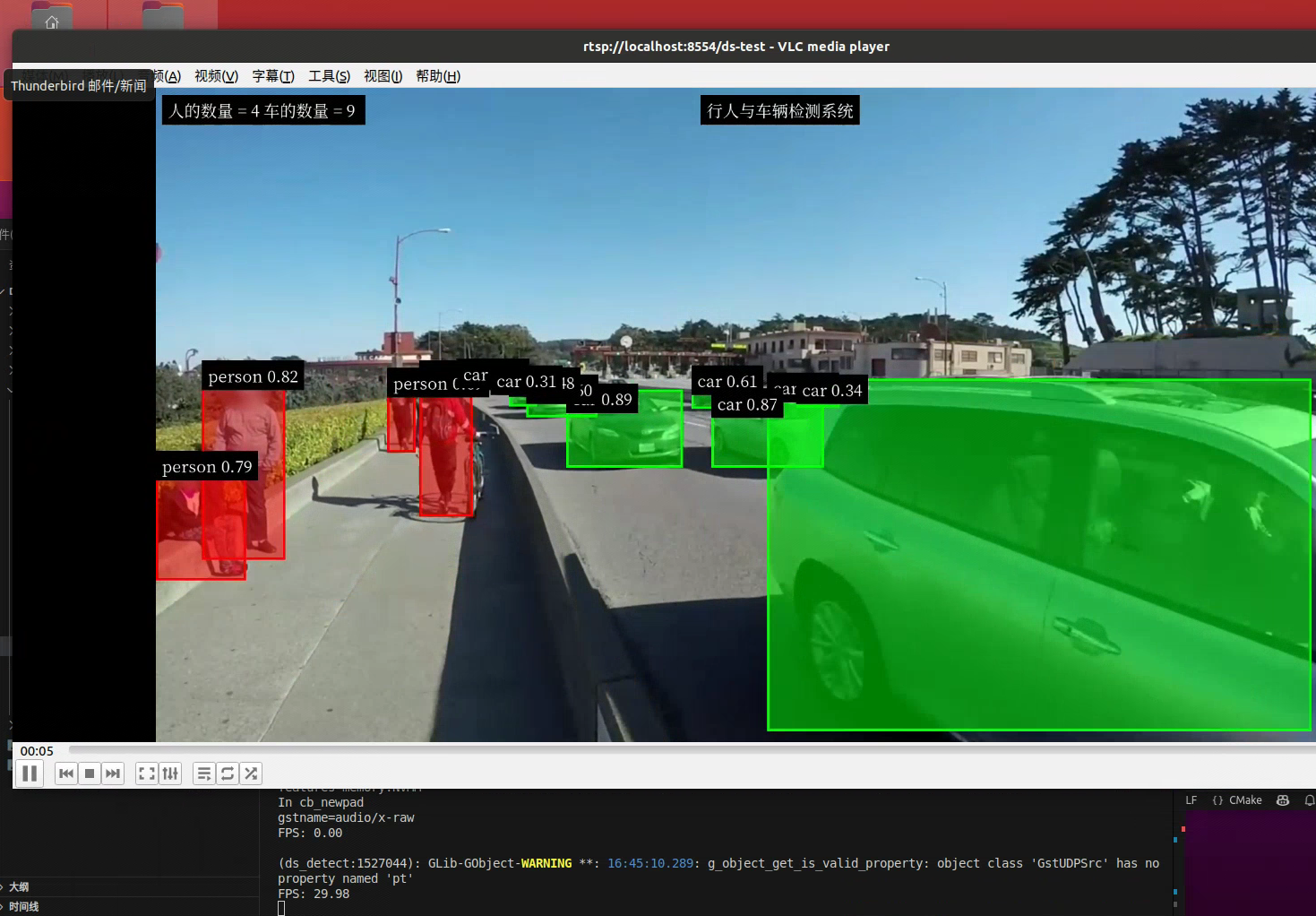
18节已经完成了deepstream原理的介绍和yolov5检测后推流的过程,本节课将进行人车目标的识别与意外闯入项目实战,以及目标iD号跟踪。
1. 目标ID号跟踪
1.1 docker运行方式(如果没有空间的话就用下面本地的方式)
-
启动镜像
# 运行deepstream容器 docker run --gpus all -

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 223
223

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











