







一、ICP 求解过程
ICP 有好多变种,ICP求解步骤可以分为以下部分:
1、选点
在模型或者场景中选取匹配点
2、匹配
将选取的一组点匹配另一组点
3、分配权重
给匹配的点对分配权重
4、去除错误匹配
根据单个匹配点对或者根据总体匹配情况去除错误匹配点
5、给定误差标准
可以是匹配点对的误差二模或者一模等形式
6、最小化匹配误差
通过最小化匹配误差求解位姿转换矩阵
下面分别从六个方面介绍ICP的求解过程。
二、选点
选点有以下方式
1、利用全部点进行迭代匹配
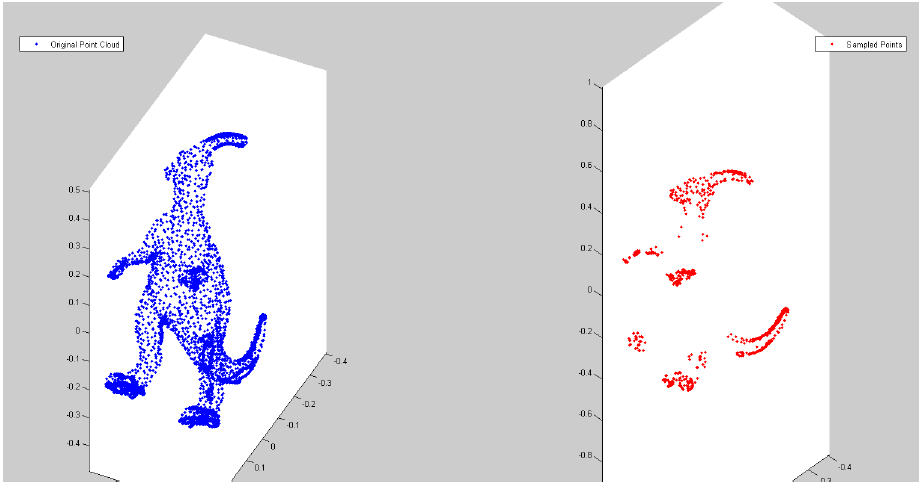
2、对所有点进行均匀采样
3、对所有点进行随机采样
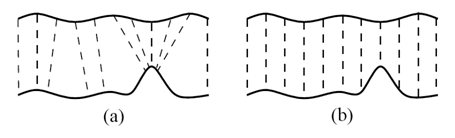
4、利用可见光图像采样梯度值大的点
5、对所有点按照法向量分布采样,使得采样点法向量分布均匀
6、对于所有上述采样算法,可以只从模型采样,或者只从场景采样,或者双向采样
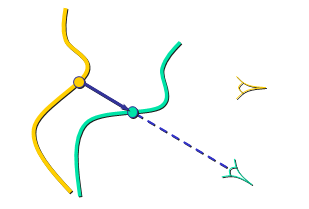
7、按照对点云配准的贡献进行采样,算法见论文《Geometrically StableSampling for the ICP Algorithm》,见附录 C。
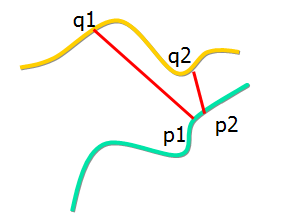
利用方法 1 – 4 采样缺点,对于下图所示的配准会产生误差,下图配准靠十字形凹槽进行配准。

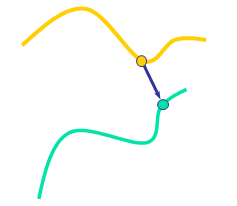
三、匹配
1、closest point 在一组点云中找另一组点云的最近点,可以用 k-d tree等算法加速最近点搜索
2、normal shooting 一组点云中的一个点,沿着点的法向量的光线和另一组点云的交点最为匹配点
3、project将场景点,从模型点的视角下,投影到模型点云
4、project and walk 如 3 方法,在投影到目标点云后,再在目标点云处搜索,搜索可以根据两点之间的距离,点到光线的距离,或者灰度值的相近程度等
5、可以上述的所有算法,前提是在两个点能在给定的衡量标准下可以匹配上,衡量标准比如颜色、两个点之间法向量的角度等,利用最速下降法搜素
优缺点:
closestpoint对于 (b) 场景不收敛,对于噪声比较敏感
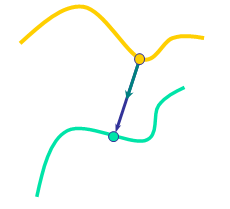
对比closest point 和 project
对于场景 (c) 上述算法只有最近点算法是收敛的
利用 project 或者 project walk 算法收敛速度块好多(甚至一个数量级)
四、分配权重
1、权重是常量
2、对于距离远的点降低其权重

3、根据点法向量的相近程度分配权重
4、根据曲率分配权重
5、根据点颜色的相近程度分配权重
6、根据测量点的不确定性分配权重(由点云测量传感器决定)
优缺点:
实验表明上述算法的效果相当。
五、去除错误匹配
1、将匹配点距离超过一定值的去除
2、将匹配点中,以一定衡量标准衡量的(通常点到点距离) n% 最坏的匹配点对去掉
3、将匹配点中,点到点距离大于一定乘机值的去掉(例如 2.5 倍的标准差)
4、去掉和周围点对不一样的匹配
5、去掉在mesh边界的点
作者推荐去除mesh边界上的点,使用起来计算代价低,对于,当两组点云不是完全重合匹配时,可以避免好多无匹配。
实验表明去掉 10% 最坏的匹配、2.5倍的标准差去除,对于算法的收敛性没有改善,反而两组匹配点相隔较远时,收敛速度较慢。
6、Picky ICP 对于一个模型点被几个场景中点作为匹配点
如果,一个模型中的点,被几个场景中的点,选择作为匹配点,则按照模型点和场景点匹配的距离,选择距离最小的场景点作为模型点的匹配点。算法在两组点云只是部分重合时很有效,会使得收敛速度变慢,同时对于原始ICP算法收敛性的证明也不再适用于 Picky ICP。
7、对于一个模型中的点在场景中有几个匹配点的问题,还可以参考论文《Robust ICP Registrationusing Biunique Correspondence》的解决方法。
六、给定误差标准
1、匹配点距离的平方和
对于匹配点距离的平方和有闭式解,求解时,不需要迭代,算法有 SVD 等算法,求解步骤见附录 A。匹配点的误差平方和最为目标函数,求解的方法还有Quaternions、Orthonoraml matrices和Dual quaternions。
2、上面点到点距离平方和再加上点的颜色的差别
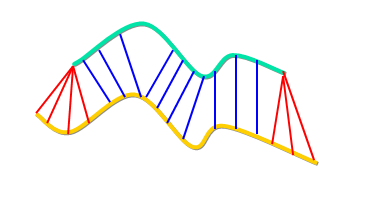
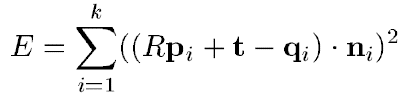
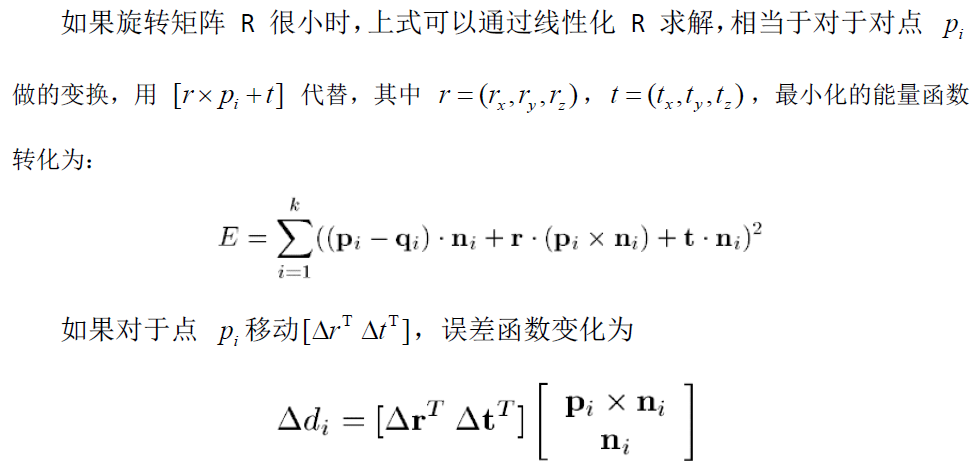
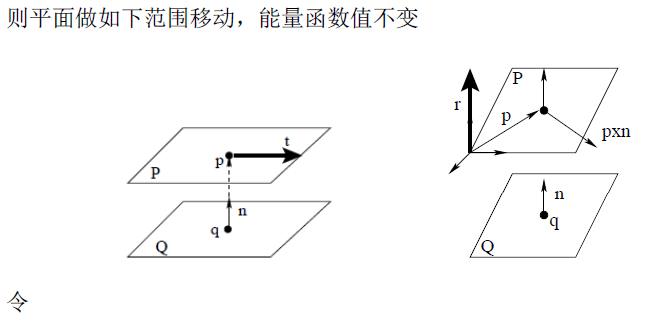
3、点到包含另一个点平面的距离的平方和
如图:
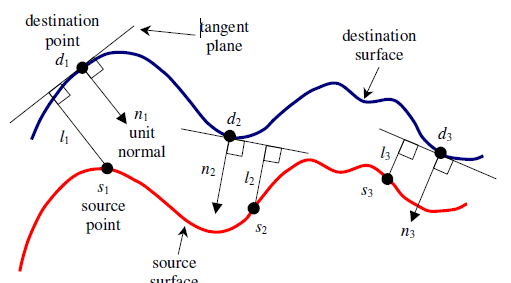
点到平面距离表达式:

没有闭式解,可以用非线性最小化算法例如 LM 算法求解,或者将问题线性化求解,令 sin a = a,cosa = 1,将求解问题线性化适合两帧之间变化小的时候求解,利用线性化求解,求解步骤见附录 B。
4、其它衡量标准,例如 L1 模
七、加速算法
如下图:
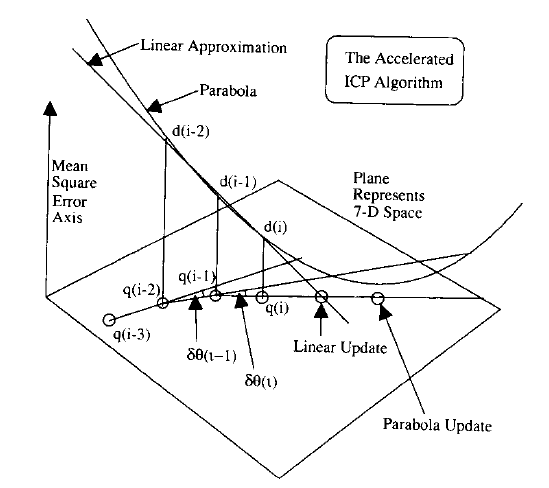
表示位姿求解的结果
令

当两次变化的角度满足以下关系时,对于最后三次位姿的移动可以有很好的近似。

令为位姿求解后带入能量函数的残差, 为近似的弧线的长度,则利用和可以对上述的曲线做近似为:

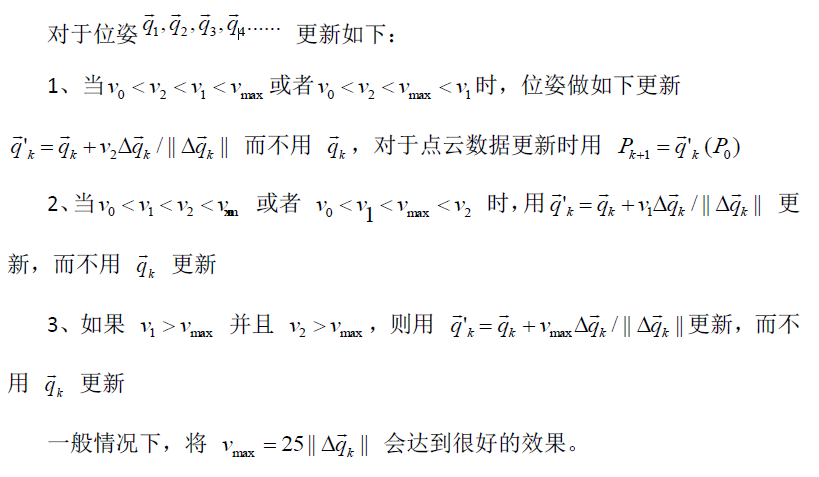
对于直线近似在和 X 轴交点处,可以给出线性的更新,对于二次曲线在最小值处,给出二次的更新,如下;

附录A
参考《Evaluation of surface registrationalgorithms for PET motion correction》2010
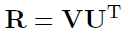
利用 SVD分解求解点到点距离平方和最小
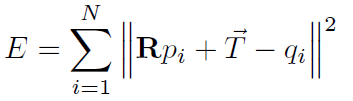
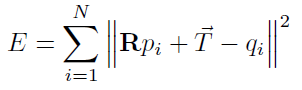
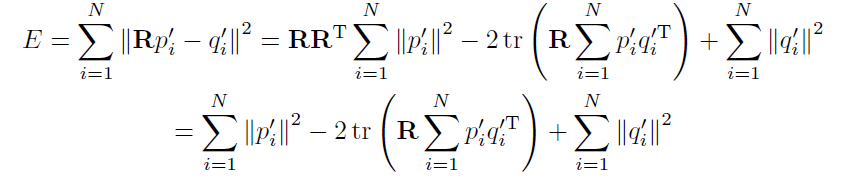
待求解的能量函数
对于匹配点距离的平方和有闭式解,求解时,不需要迭代,算法有 SVD 等算法。
利用SVD分解求解算法:
p 和 q 最为匹配点对
计算匹配点对的中心坐标
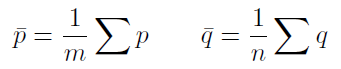
点到中心点的偏差

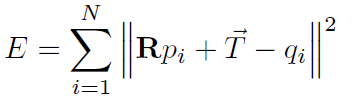
找变换 T 使得下面目标函数最小化
将上式带入可得

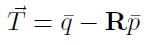
因为要最小化误差,需要将两组点云数据的中心点移到一起,满足下式
目标函数简化为
定义
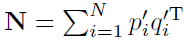
目标函数最小化转换为下式最小化

由柯西不等式得
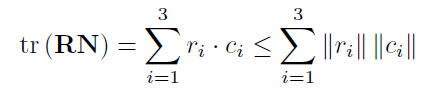
由 R 是单位正交矩阵

对于 N 奇异值分解
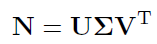
当 R 为
RN trace 变为

即 R 取上式时目标函数达到最小。
附录B
参考文献《Linear Least-Squares Optimization for Point-to-Plane ICP SurfaceRegistration》
点到平面距离平方和表达式为:

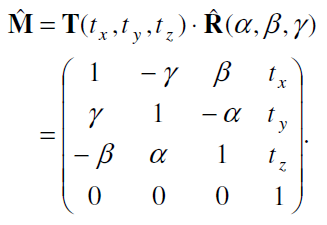
其中 M 是欧式变换

其中
其中
由上式可以看出,目标函数是三个旋转角 和三个位移量 的二次函数,只能用迭代求解的方法(例如LM)。
线性近似
当旋转角 近似为 0 度,可以让、,由近似可以得到以下表达式:
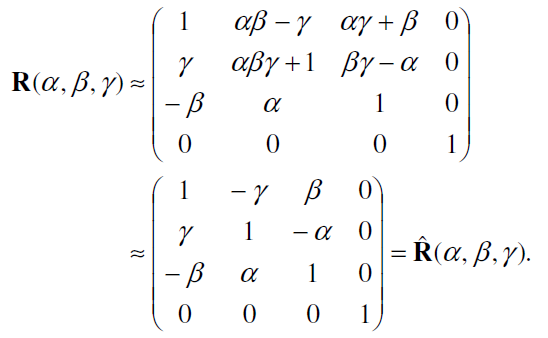
变换矩阵 M 变为:
目标函数:
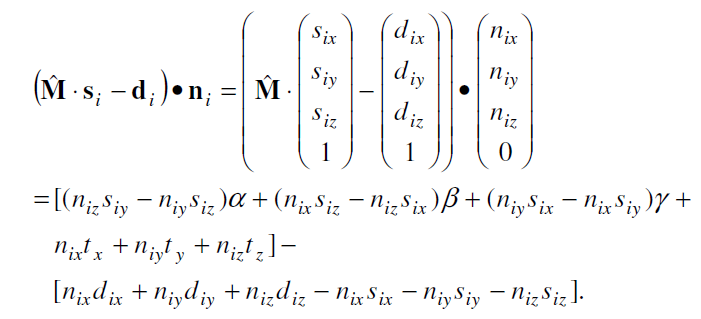
对于 N 对匹配点,将目标函数变为:
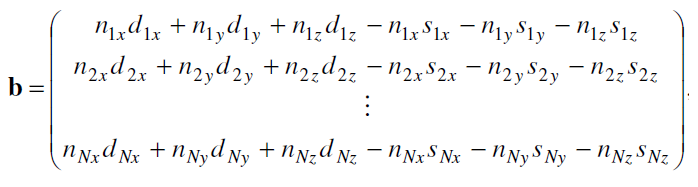
变量

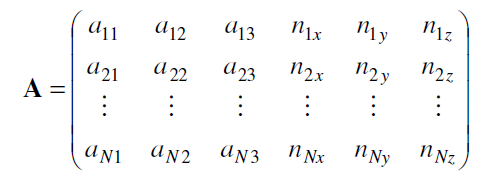
其中
目标函数变为


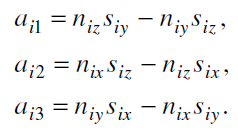
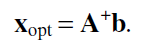
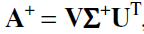
位姿最优解

注意:
1、虽然近似的时候,角度不能太大,实际应用的时候,近似的角度甚至可以得到30度(角度的大小和两组点云的几何形状,和两组点云重叠的范围有关)。

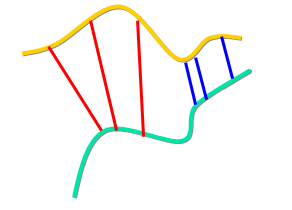
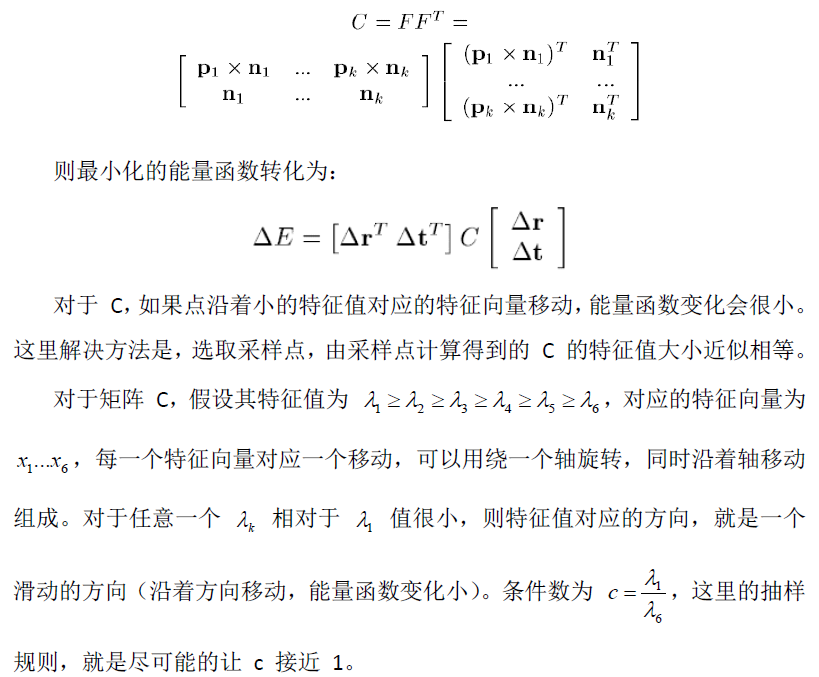
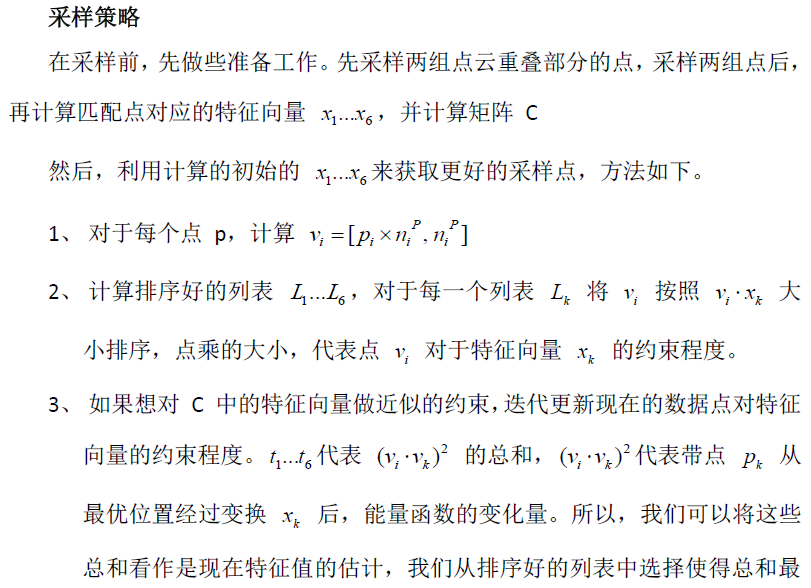
附录C
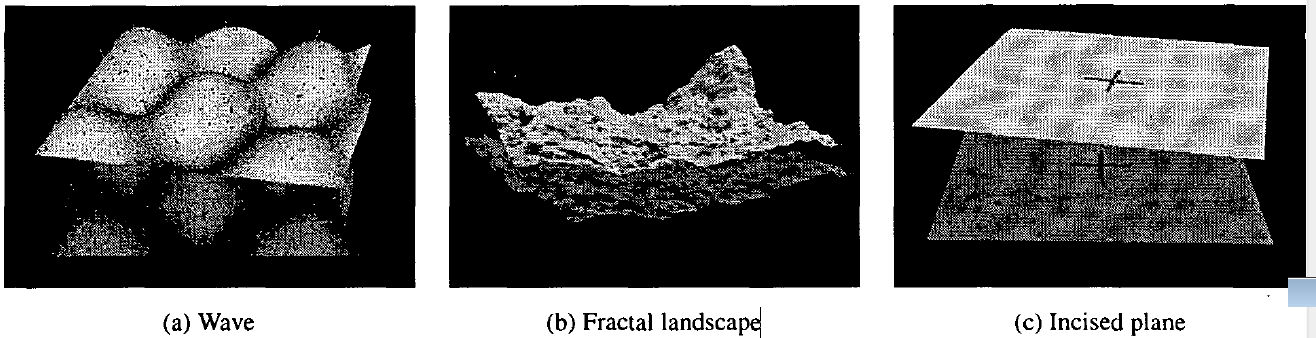
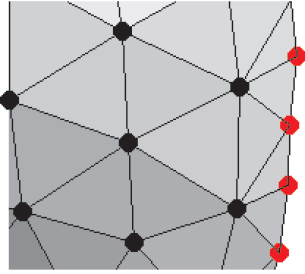
按照点对配准的贡献进行采样,如图,采样如下
算法如下:
利用点到平面距离作为目标函数最小化,表达式如下:
















 1151
1151

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









