







学习激光SLAM期间,很多论文和作品都会用几个标准的数据集,来验证自己的slam改进算法,比较建图效果; 或建完图之后测试定位效果。
数据集包括:
Intel Research Lab (Seattle)

ACES Building (Austin)

2 MIT Killian Court (2D)

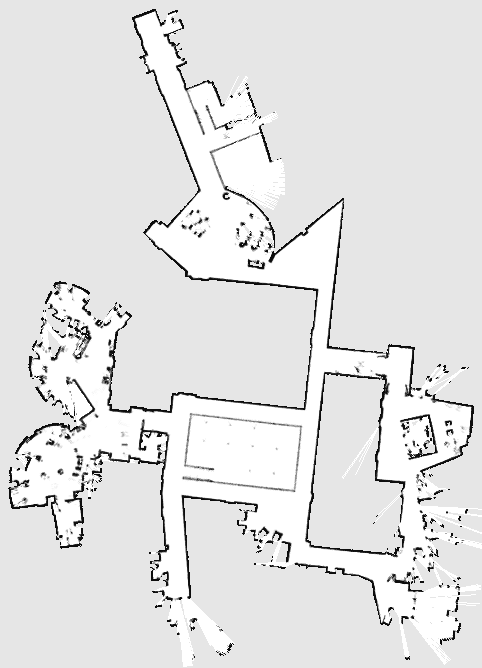
MIT CSAIL Building

Freiburg Indoor Building 079

Freiburg University Hospital (3D)

官网地址:SLAM Benchmarking Datasets http://ais.informatik.uni-freiburg.de/slamevaluation/datasets.php
http://ais.informatik.uni-freiburg.de/slamevaluation/datasets.php
截止2023年4月,官网可能有更新,可以查看该网址
SLAM Benchmarking Datasets (uni-freiburg.de)
Cyrill Stachniss (uni-freiburg.de)
Cyrill Stachniss (uni-freiburg.de) http://www2.informatik.uni-freiburg.de/~stachnis/datasets.html
http://www2.informatik.uni-freiburg.de/~stachnis/datasets.html
This website is outdated, please visit my new site here.
Robotics Datasets
The data files on this page are available on Radish, are self-recorded, or have been provided to me. I would like to thank everyone who contributed to this work by publishing log-files. If you want to use a log-file provided on this page, please take care that the correct person gets acknowledged!
MIT CSAIL
The raw log data was recorded by Cyrill Stachniss.
| 正在上传…重新上传取消 |
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










{kind=link}