







1、引言
1.1 什么是步进电机
步进电机(stepping motor)是一种将电脉冲信号转换成相应角位移的电动机。每输入一个脉冲信号,转子就转动一个角度(步进电机的步距角),其转动的角位移与输入的脉冲数量成正比,转速与脉冲频率成正比。因此,步进电动机又称脉冲电动机。
1.2 步进电机的步距角
步进电机的步距角是指步进电机在接收到一个电脉冲信号后,其转子转动的角度大小。它是衡量步进电机精度和分辨率的重要参数之一。
1.2.1 步距角与减速比
步进电机的规格书里,会有步距角参数,比如规格书里的步距角11.25°或11.25°/64,这里64是减速比1/64(小齿轮带动大大齿轮时,转动角度时变慢的)。
11.25°表示的是电机转子齿轮数360/11.25=32
由于有减速比,11.25/64=0.175°,即每个脉冲电机的小齿轮转动11.25°,算上减速比,实际输出的转动角度是0.175°。
另外,齿轮数越多,步距角越小,也就是转动会更加平滑,不会抖动明显。也能实现精确的位置控制。
2、步进电机的励磁
步进电机的驱动方式主要有:2-2相励磁和1-2相励磁。
2.1 2-2相励磁
每一步都是两个线圈同时励磁,故被称为2-2相励磁。也就是相数为2相,驱动方式为2相励磁。通常,四线电机为2-2相励磁的驱动方式。
2.1.1 二相四拍
二相四拍:有二个线圈,1个励磁循环有四个脉冲信号。型号24BYJ28的步进电机励磁顺序表和接线,如图1所示。
型号24BYJ28顺时针方向CW:
步1:A相为正,A+>A-;B相为正,B+>B-;电机转子转动一个步距角。
步2:A相位负,A+<A-;B相为正,B+>B-;电机转子转动一个步距角。
步3:A相位负,A+<A-;B相为负,B+<B-;电机转子转动一个步距角。
步4:A相位正,A+>A-;B相为负,B+<B-;电机转子转动一个步距角。
2-2相励磁的步距角通常与电机固有的结构决定的步距角相同。
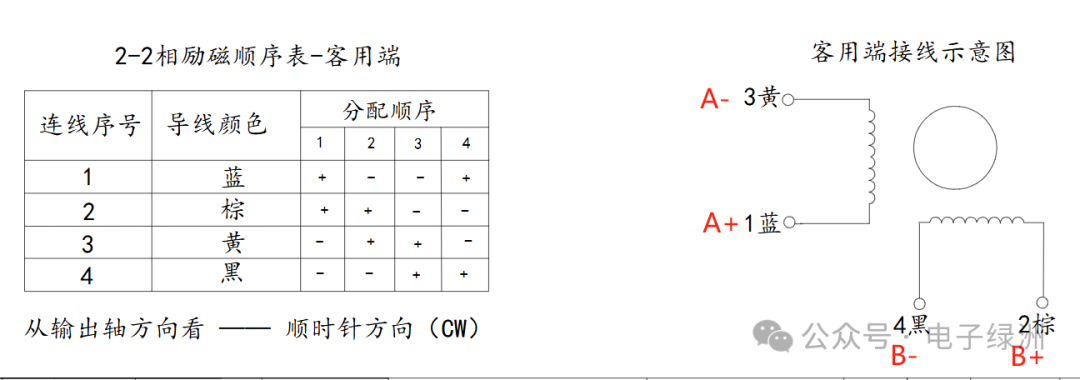
图1 型号24BYJ28的步进电机
2.2.2 步进电机型号命名规则
24:表示该步进电机的有效最大外直径为24mm。
B:表示步进电机,中文拼音Bu的首字母。
Y:表示永磁式,中文拼音Yong的首字母。
J:表示减速型,中文拼音Jian的首字母。
28:表示2相四拍,通常2相都是四拍。
2.2 1-2相励磁
1-2相励磁是1相和2相相互交替励磁,即1个线圈通电和2个线圈通电交替运行,直到一个励磁完成再重复新的一轮励磁。 通常,五线电机为1-2相励磁。(五线电机就是在四相电机的基础上,从两个线圈中间都拉出一条线,连接在一起,且都是作为电源来接,作为驱动源。)
1-2相励磁的每个脉冲信号转动角度为步距角的一半,也叫半步驱动。
2.2.1 四相八拍
四相八拍:两个线圈的中间都接到电源,相当于四个线圈(四拍),1个励磁循环是八个脉冲信号。型号24BYJ48的步进电机励磁顺序表和接线,如图2所示。
型号24BYJ48逆时针方向CCW:
半步8:只有A相通电,其他相不通电,转动半个步距角。
半步7:只有A相和B相通电,其他相不通电,转动半个步距角。
半步6:只有B相通电,其他相不通电,转动半个步距角。
半步5:B相和C相通电,其他相不通电,转动半个步距角。
半步4:只有C相通电,其他相不通电,转动半个步距角。
半步3:只有C相和D相通电,其他相不通电,转动半个步距角。
半步2:只有D相通电,其他相不通电,转动半个步距角。
半步1:只有D相和A相通电,其他相不通电,转动半个步距角。
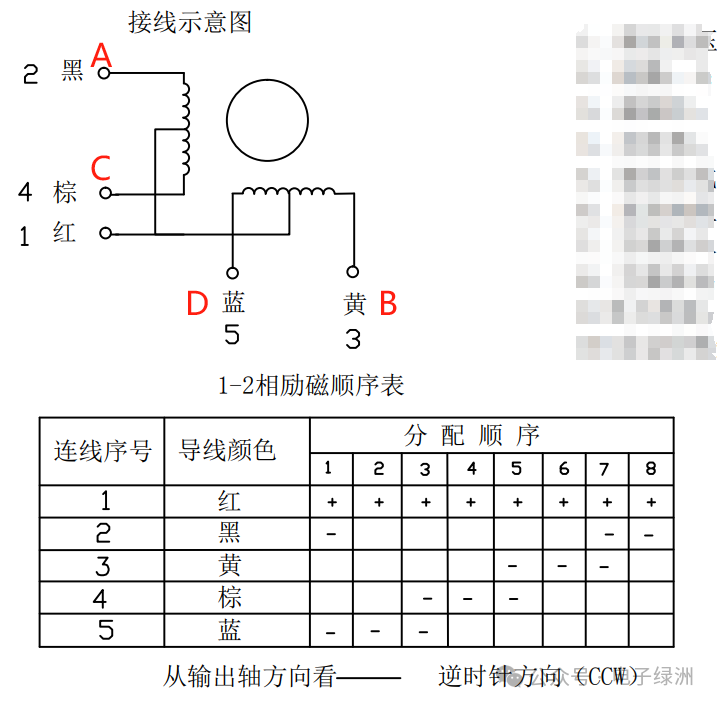
图2 型号24BYJ48的步进电机
——END——
丛林社会,从来不相信眼泪;再多的抱怨也没有用,不会有人可怜的
推荐阅读

















 6600
6600

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









