






行驶车辆状态估计,无迹卡尔曼滤波,扩展卡尔曼滤波(EKF UKF)
软件使用:Matlab Simulink
适用场景:采用扩展卡尔曼滤波和无迹卡尔曼滤波EKF UKF进行行驶车辆的“车速,质心侧偏角,横摆角速度估计”,可实现多种工况下车辆状态估计。
产品simulink源码包含如下模块:
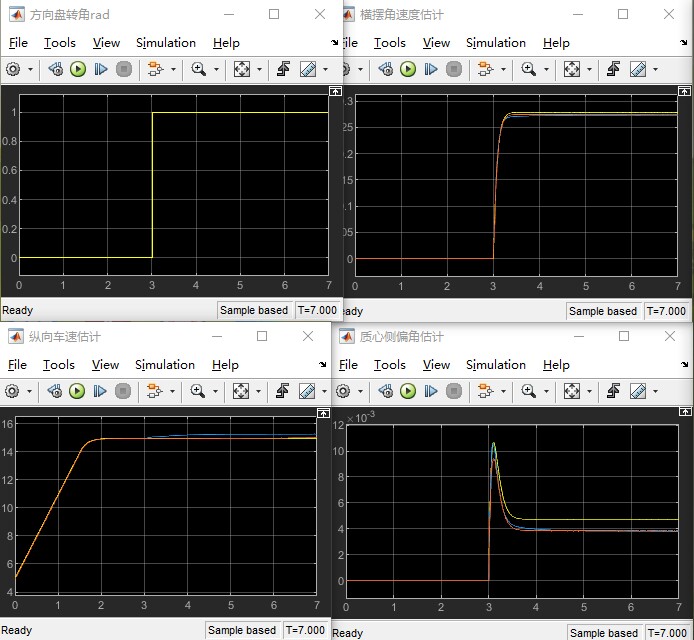
→工况: 阶跃工况
→整车模块:7自由度整车模型
→估计模块:无迹卡尔曼滤波,扩展卡尔曼滤波
→模型状况:
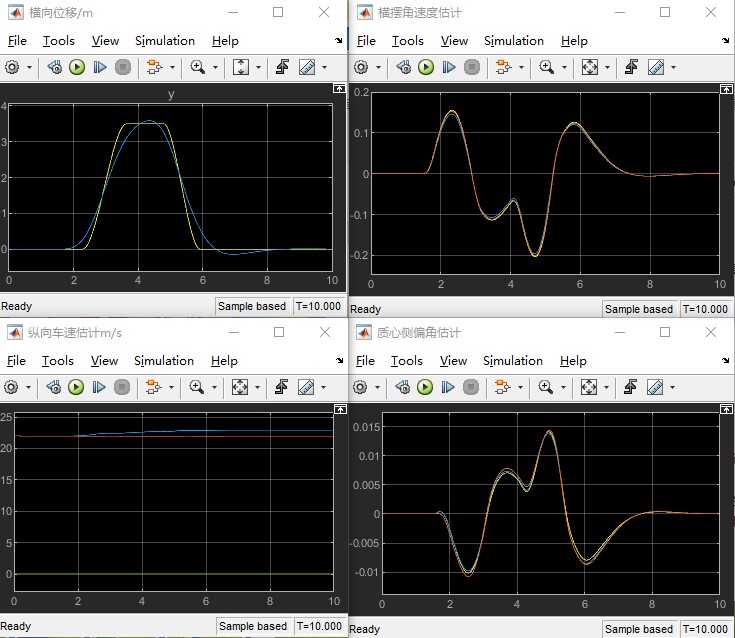
模型输入:方向盘转角delta,车辆纵向加速度ax
模型输出:横摆角速度wz,纵向车速vx,质心侧偏角β?
拿后包含:simulink源码文件,详细建模说明文档,对应参考资料,售后提供关于产品任何问题,代码均为自己开发,感谢您的支持。
适用于需要或想学习整车动力学simulink建模,以及simulink状态估计算法建模的朋友。
模型运行完全OK(仅适用于MATLAB17版本及以上),
YID:17200643944832006
青青猪儿
行驶车辆状态估计是现代车辆控制系统中的一个重要问题,它可以帮助我们准确地获取车辆在运行过程中的一些关键参数,如车速、质心侧偏角、横摆角速度等。在车辆控制系统中,准确地估计这些参数对于实现精确的车辆控制算法至关重要。而无迹卡尔曼滤波和扩展卡尔曼滤波是两种常用的状态估计算法,它们可以有效地解决车辆状态估计问题。
在本文中,我们将介绍如何使用Matlab Simulink工具,结合无迹卡尔曼滤波和扩展卡尔曼滤波算法,实现行驶车辆的“车速、质心侧偏角、横摆角速度估计”。我们提供了相应的Simulink源码,其中包含了阶跃工况、7自由度整车模型、无迹卡尔曼滤波和扩展卡尔曼滤波模块。通过输入方向盘转角和车辆纵向加速度,我们可以得到横摆角速度、纵向车速和质心侧偏角等关键参数的估计结果。
在实际应用中,我们可以根据需要选择不同的工况,比如阶跃工况,以模拟车辆在不同行驶状态下的性能表现。同时,我们提供了7自由度整车模型,用于描述车辆在运动过程中各个自由度上的运动特性。这个模型是基于车辆动力学理论建立的,可以较为真实地模拟车辆的运动过程。
此外,我们还实现了无迹卡尔曼滤波和扩展卡尔曼滤波两种状态估计算法。无迹卡尔曼滤波是基于无迹变换的一种扩展卡尔曼滤波算法,它通过无迹变换将非线性函数转化为线性函数,从而实现对非线性系统的状态估计。而扩展卡尔曼滤波是一种常用的非线性系统状态估计算法,它通过线性化非线性函数来逼近非线性系统的行为。这两种算法能够克服传统卡尔曼滤波算法对系统线性性的要求,适用于更广泛的应用场景。
通过使用Simulink源码,我们可以直观地了解无迹卡尔曼滤波和扩展卡尔曼滤波算法的实现过程。同时,我们还提供了详细的建模说明文档和对应的参考资料,帮助读者理解算法的原理和实现细节。此外,我们提供售后服务,可以解答读者在使用过程中遇到的任何问题。
总之,本文介绍了使用无迹卡尔曼滤波和扩展卡尔曼滤波算法进行行驶车辆状态估计的方法。通过Simulink工具的使用,我们实现了车速、质心侧偏角、横摆角速度等关键参数的估计,并提供了相应的源码和文档。这对于需要学习整车动力学Simulink建模和状态估计算法建模的读者来说是一个很好的学习资源。
感谢您的支持,如果您对本文或相关内容有任何问题,请随时与我们联系。我们将竭诚为您提供帮助。希望这篇文章对您的学习和工作有所帮助!
相关的代码,程序地址如下:http://nodep.cn/643944832006.html
















 621
621

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









