






Carsim和simulink联合仿真车辆状态估计
估计的状态为:质心侧偏角,横摆角速度,纵向力和侧向力,纵向车速,侧向车速,四个轮速
基于dugoff轮胎模型进行了轮胎纵向力和侧向力计算,再基于无迹卡尔曼滤波进行了车辆状态参数估计等。
内容附带详细的代码注释和参考文献。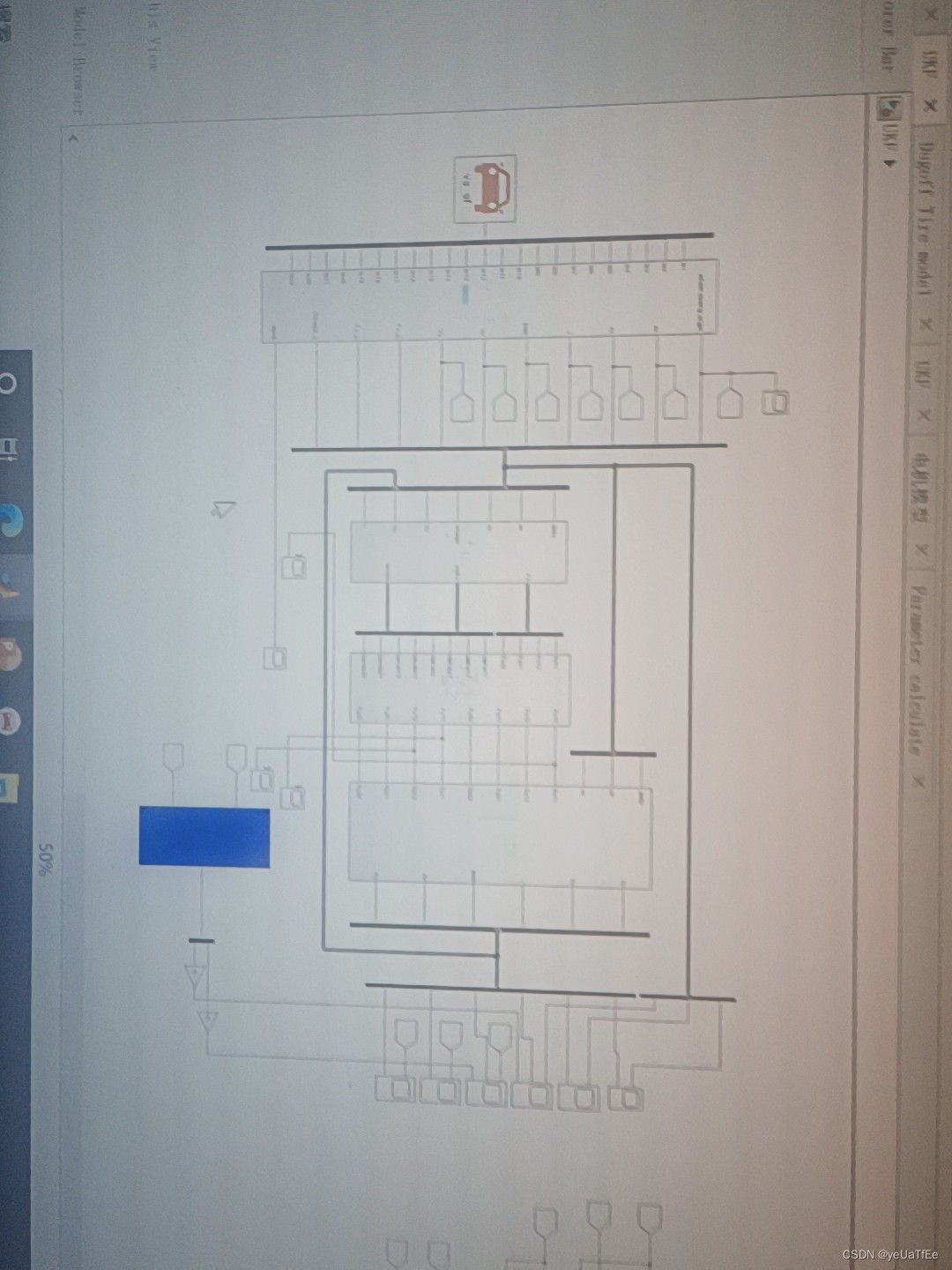
Carsim和Simulink联合仿真车辆状态估计
近年来,在车辆控制系统方面的研究中,越来越多的研究者开始关注车辆状态估计技术。车辆状态估计是指对车辆运动过程中的一些重要参数,如质心侧偏角、横摆角速度、纵向力和侧向力、纵向车速、侧向车速、四个轮速等进行实时准确的估计。这些参数对于车辆动态控制和安全性能的提升具有至关重要的作用。目前,常见的车辆状态估计方法包括基于传感器的状态估计方法和基于模型的状态估计方法。
在本文中,我们将介绍一种基于Carsim和Simulink联合仿真的车辆状态估计方法。该方法涉及轮胎纵向力和侧向力的计算,以及基于无迹卡尔曼滤波的车辆状态参数估计。同时,我们也会附带详细的代码注释和参考文献,方便读者更好地了解本文所介绍的技术方法。
一、轮胎纵向力和侧向力的计算
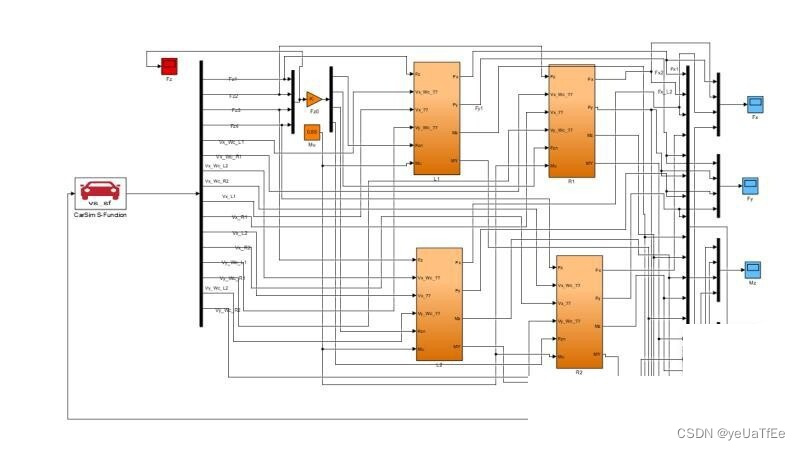
在车辆状态估计中,轮胎纵向力和侧向力是非常重要的参数。基于dugoff轮胎模型,我们可以计算出轮胎在纵向和侧向方向上的力。在这里,我们使用了Carsim和Simulink联合仿真软件平台进行模拟。首先,我们需要将车辆的运动方程写成状态空间模型的形式。然后,使用Simulink进行模拟计算,得到轮胎在纵向和侧向方向上的力。具体的计算过程如下:
对于纵向方向上的轮胎力,我们可以利用dugoff轮胎模型计算得到:
$f_x = Dsin(Carctan(Bs_x-E(Bs_x)-atan(V_xr/P)/pi180))/C$
其中,$D$表示轮胎纵向力的最大值,$B$表示轮胎摩擦系数,$E$表示轮胎侧向力的影响,$P$表示轮胎压强,$V_x$表示车辆在x方向上的速度,$r$表示车辆的横摆角,$s_x$表示轮胎侧向滑移率。
对于侧向方向上的轮胎力,我们可以利用dugoff轮胎模型计算得到:
$f_y = Dsin(Carctan(Bs_y-E(Bs_y)))/C$
其中,$s_y$表示轮胎侧向滑移率。
根据上述公式,我们可以得到车辆在纵向和侧向方向上的轮胎力,并将其作为后续车辆状态参数估计的输入。
二、基于无迹卡尔曼滤波的车辆状态参数估计
在得到轮胎纵向力和侧向力之后,我们需要对车辆的状态参数进行估计。本文中,我们使用了无迹卡尔曼滤波(Unscented Kalman Filter)进行状态估计。无迹卡尔曼滤波是一种针对非线性系统的状态估计方法,它能够通过对非线性系统进行线性化,实现对状态参数的准确估计。
无迹卡尔曼滤波的基本思路是将非线性系统转化为线性系统,以实现对状态参数的估计。具体的操作包括两个步骤:
(1)对非线性系统进行“无迹变换”(Unscented Transformation)。无迹变换是一种针对非线性系统的线性化方法,它能够通过对状态空间进行采样,生成一些代表状态分布的采样点。然后,利用这些采样点来模拟真实状态的分布情况,从而实现对非线性系统的线性化。
(2)对线性化后的系统进行卡尔曼滤波。在进行无迹变换后,我们可以得到线性化后的系统状态方程和观测方程。然后,我们可以利用卡尔曼滤波来对线性化后的系统进行状态参数估计。在这里,我们采用了无迹卡尔曼滤波的版本,以实现对车辆状态参数的估计。
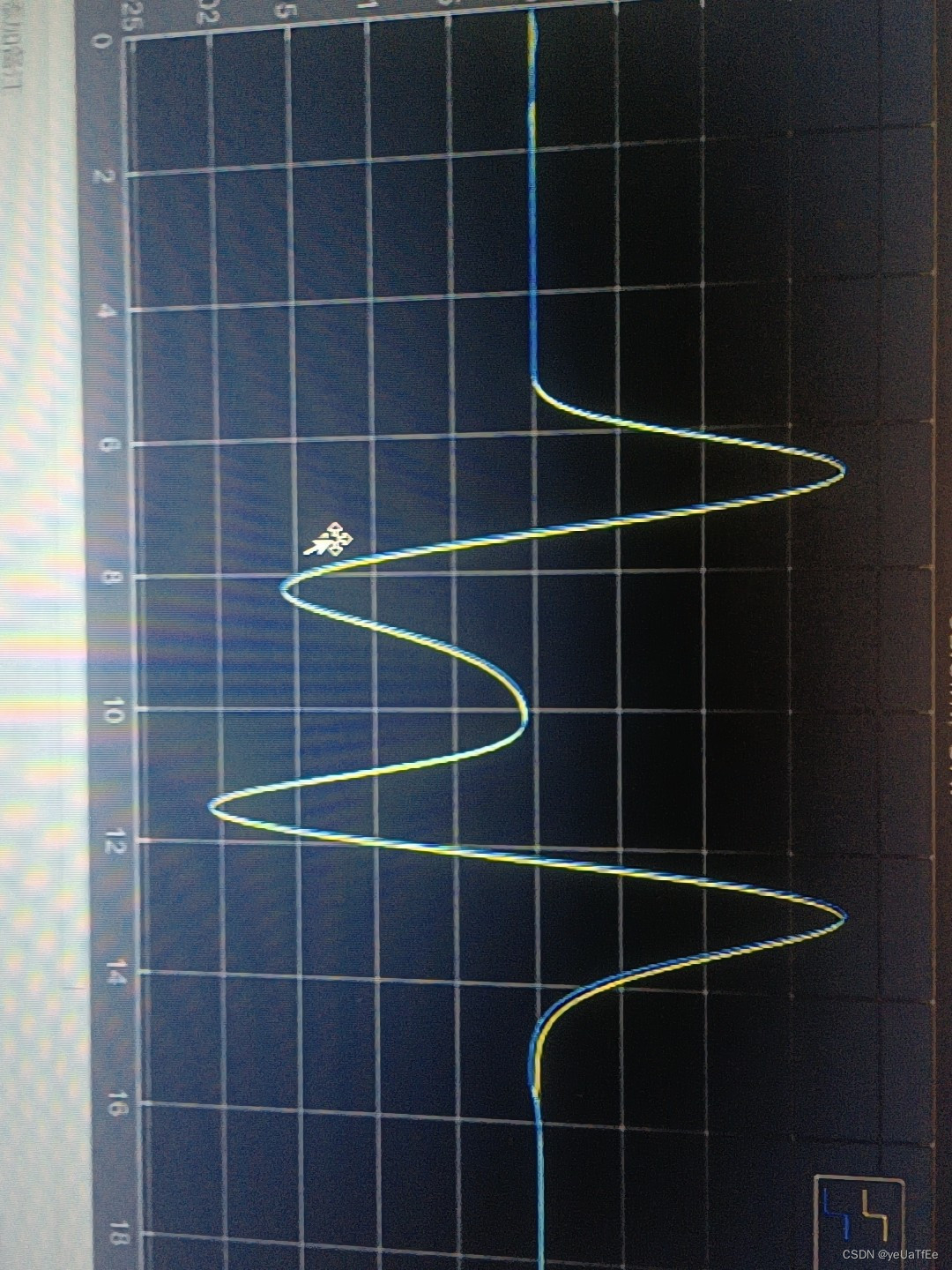
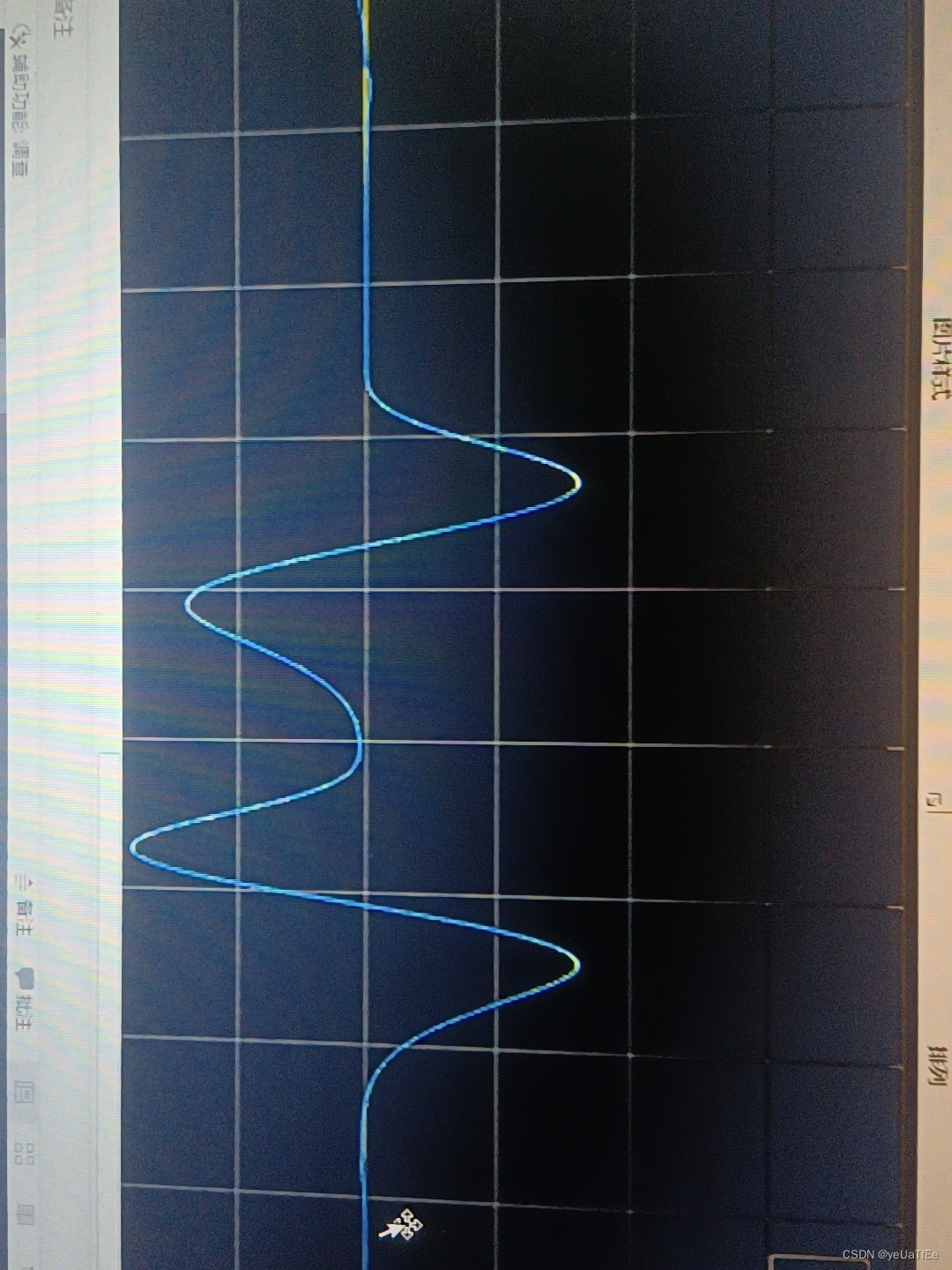
通过对Carsim和Simulink联合仿真的模拟计算,我们可以得到车辆在运动过程中的质心侧偏角、横摆角速度、纵向力和侧向力、纵向车速、侧向车速、四个轮速等参数。然后,我们可以使用基于无迹卡尔曼滤波的车辆状态参数估计方法,对这些参数进行实时准确的状态估计。最终,我们可以得到车辆在运动过程中的实时状态参数,并用以实现对车辆的动态控制。
三、本文的代码注释和参考文献
本文所提到的Carsim和Simulink联合仿真程序以及无迹卡尔曼滤波算法代码,均可以在Github代码库中找到。在代码注释方面,我们采用了较为详细的注释方式,以便于读者更好地理解程序逻辑和算法原理。同时,我们还附带了一些相关的参考文献,供读者进一步了解相关研究内容。
四、总结
本文介绍了一种基于Carsim和Simulink联合仿真的车辆状态估计方法。该方法涉及轮胎纵向力和侧向力的计算,以及基于无迹卡尔曼滤波的车辆状态参数估计。通过这种方法,我们可以实现对车辆状态参数的实时估计,以实现对车辆动态控制的优化。本文同时也附带了详细的代码注释和参考文献,以供读者参考。
相关代码,程序地址:http://lanzouw.top/702443866113.html















 377
377











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









