






基于模型预测控制(自带的mpc模块)和最优控制理论的Carsim与Matlab simulink联合仿真实现汽车主动避撞和跟车功能(acc自适应巡航),包含simulink模型(其中有车辆逆纵向动力学模型、逆发动机模型、切换控制逻辑等),Carsim模型,资料。
(最好用Carsim2016版本及以上版本,模型不是很难,适合新手初步学习)
YID:5328669812232942
西南害羞的贝母

探索Carsim与Matlab Simulink联合仿真:实现汽车主动避撞与跟车功能
摘要:
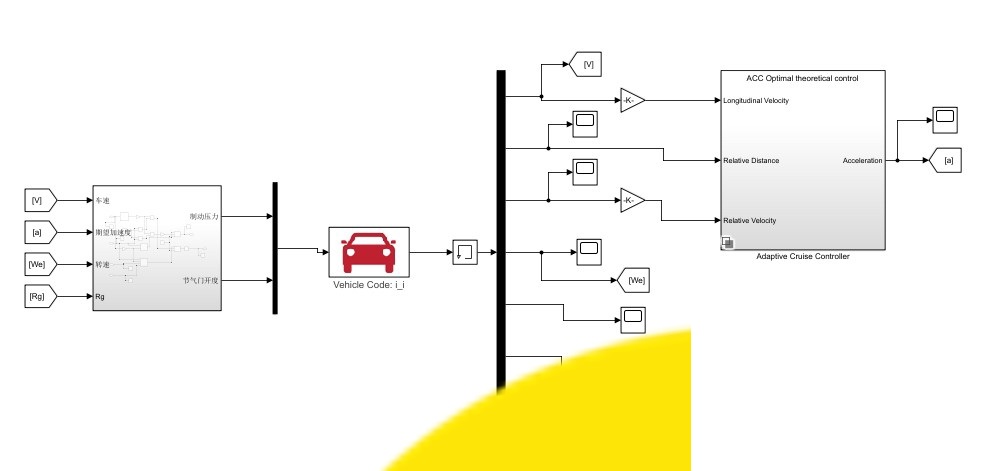
本文将探讨如何利用Matlab Simulink与Carsim的联合仿真,基于模型预测控制(MPC)及最优控制理论,实现汽车的主动避撞(ACC自适应巡航)和跟车功能。本文将深入分析Simulink中的逆纵向动力学模型、逆发动机模型及切换控制逻辑的搭建,并结合Carsim的实用模型进行演示。希望通过此文,为初探者提供一个清晰的学习路径。
一、引言
在汽车智能化、网联化的趋势下,主动安全技术愈发受到关注。其中,主动避撞和跟车功能是衡量汽车智能化水平的重要指标之一。本文将通过Matlab Simulink与Carsim的联合仿真,展示如何基于MPC模块和最优控制理论,实现这些功能。
二、Simulink模型构建
-
逆纵向动力学模型:Simulink中,逆纵向动力学模型是关键的一环。它根据车辆的当前状态(如速度、加速度等)以及驾驶员的意图(如油门、刹车等),计算出车辆所需的驱动力或制动力。这一模型是车辆实现主动避撞和跟车功能的基础。
-
逆发动机模型:逆发动机模型则负责根据驱动力或制动力需求,计算出相应的发动机转矩或转速。这一模型与车辆的发动机性能密切相关,是实现精确控制的关键。
-
切换控制逻辑:在Simulink中,切换控制逻辑是连接各模块的桥梁。它根据车辆的状态和驾驶员的意图,决定是否启动避撞或跟车功能,并协调各模块的工作。
三、Carsim模型应用
Carsim作为一个强大的汽车仿真,提供了丰富的车辆模型和环境模型。在本次联合仿真中,我们将使用Carsim的车辆模型进行实车模拟,以验证Simulink中模型的正确性。
四、MPC模块与最优控制理论的应用
MPC模块是一种基于模型的预测控制方法,它可以根据车辆当前的状态和未来的预测,计算出最优的控制策略。而最优控制理论则为MPC模块提供了理论基础。在本次仿真中,我们将利用MPC模块和最优控制理论,实现汽车的主动避撞和跟车功能。
五、联合仿真实现
通过Matlab Simulink与Carsim的联合仿真,我们可以将Simulink中的模型与Carsim中的实车模型进行连接。在仿真过程中,Simulink中的模型会根据车辆的当前状态和驾驶员的意图,计算出控制指令,并通过接口传递给Carsim中的实车模型。Carsim则会根据接收到的指令,模拟出车辆的响应和状态变化。通过不断调整Simulink中的模型参数,我们可以找到最优的控制策略,实现汽车的主动避撞和跟车功能。
六、结论
本文通过探索Matlab Simulink与Carsim的联合仿真,展示了如何基于MPC模块和最优控制理论,实现汽车的主动避撞和跟车功能。通过搭建逆纵向动力学模型、逆发动机模型及切换控制逻辑等关键模块,并结合Carsim的实用模型进行演示,为初探者提供了一个清晰的学习路径。未来,随着智能网联汽车的进一步发展,这类技术将有更广泛的应用前景。
后续更精彩: https://pan.baidu.com/s/15JL-VEaq9DGifd5TKEc3JA?pwd=hh8z
















 788
788

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









