






基于模型预测控制(自带的mpc模块)和最优控制理论的Carsim与Matlab simulink联合仿真实现汽车主动避撞和跟车功能(acc自适应巡航),包含simulink模型(其中有车辆逆纵向动力学模型、逆发动机模型、切换控制逻辑等),Carsim模型,资料。
(最好用Carsim2016版本及以上版本,模型不是很难,适合新手初步学习)
ID:3220702627791823
友帮计算
基于模型预测控制(自带的MPC模块)和最优控制理论的Carsim与Matlab Simulink联合仿真实现汽车主动避撞和跟车功能(ACC自适应巡航),包含Simulink模型(其中有车辆逆纵向动力学模型、逆发动机模型、切换控制逻辑等),Carsim模型和相关资料。这是一项基于现代车辆控制领域的研究,旨在提高车辆主动安全性和驾驶舒适性。
-
引言
车辆主动安全性一直是汽车工业研究的热点之一。随着自动驾驶技术的快速发展,汽车的智能化和自主化程度不断提高,主动避撞和跟车功能也逐渐成为了现代汽车的重要特性。本文将介绍一种基于模型预测控制和最优控制理论的方法,通过Carsim和Matlab Simulink的联合仿真实现汽车主动避撞和跟车功能。 -
模型预测控制(MPC)和最优控制理论简介
2.1 模型预测控制(MPC)
模型预测控制是一种在控制器内部使用数学模型进行预测的先进控制方法。它可以根据车辆当前状态和规定的性能指标,预测未来一段时间内的车辆行为,并通过调节控制器输出来实现特定的控制目标。
2.2 最优控制理论
最优控制理论是数学和工程学交叉的领域,它研究如何确定一个系统在一定约束下的最佳控制策略。最优控制理论可以帮助我们设计出能够最大化车辆性能和效率的控制器。
- Carsim与Matlab Simulink联合仿真
3.1 Carsim模型
Carsim是一款用于车辆动力学仿真和控制研究的软件。它可以精确地模拟车辆在各种动态驾驶条件下的行为,并提供丰富的控制接口和参数调节功能。
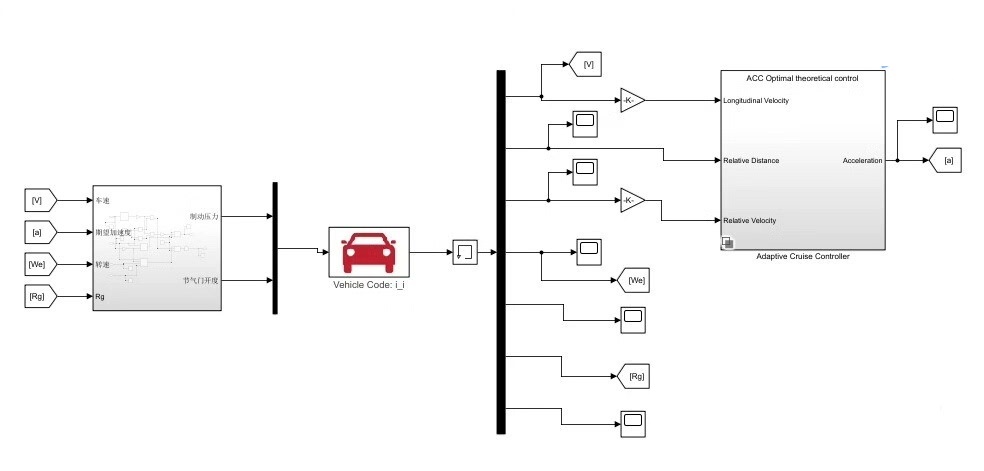
3.2 Simulink模型
Simulink是一款用于建立动态系统模型和进行仿真的工具。在本文中,我们使用Simulink搭建了包含车辆逆纵向动力学模型、逆发动机模型和切换控制逻辑等的Simulink模型,用于实现主动避撞和跟车功能。
-
实验结果和讨论
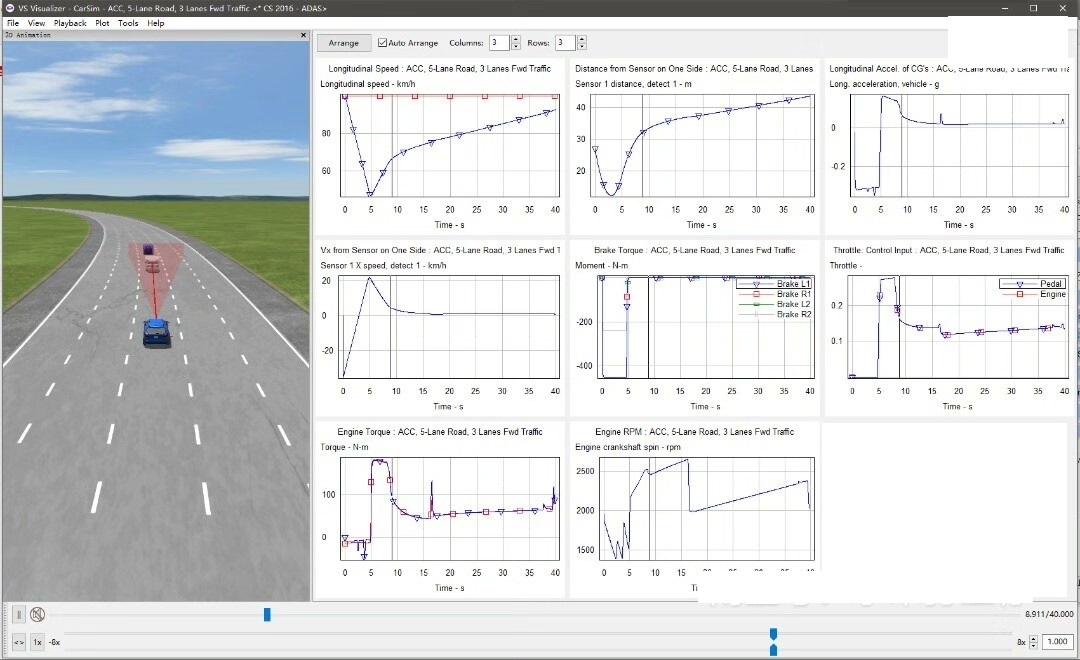
我们通过联合Carsim与Matlab Simulink的仿真,实现了汽车主动避撞和跟车功能。在实验中,我们设置了特定的性能指标,通过调节控制器输出,使车辆能够在安全范围内避免碰撞,并且能够根据前车的速度和加速度来进行自适应巡航。 -
总结与展望
本文介绍了一种基于模型预测控制和最优控制理论的方法,通过联合Carsim与Matlab Simulink的仿真,实现了汽车主动避撞和跟车功能。该方法在提高车辆主动安全性和驾驶舒适性方面具有潜在的应用价值。未来,我们将进一步优化控制算法,提高系统的稳定性和性能。
通过以上介绍,我们可以看出,基于模型预测控制和最优控制理论的Carsim与Matlab Simulink联合仿真在汽车主动避撞和跟车功能方面具有广泛的应用前景。这一方法不仅可以提高车辆的主动安全性,还可以增强驾驶员的舒适性和驾驶体验。希望本文对正在研究和应用相关技术的读者有所帮助,同时也欢迎各位在实践中对该方法进行改进和优化。
【相关代码,程序地址】:http://fansik.cn/702627791823.html
















 421
421

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









