






基于AFS和DYC集成控制的分布式驱动电动汽车
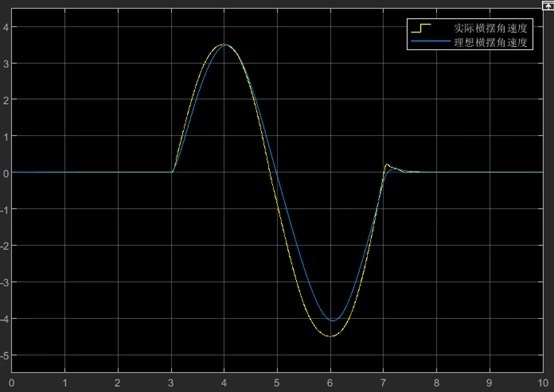
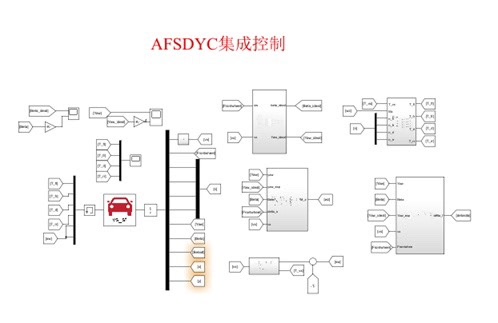
通过Simulink与CarSim联合仿真,包含AFS模块、DYC模块、扭矩分配模块、驾驶员模型、理想车辆模型,其中AFS与DYC模块基于滑模变结构控制理论,横摆角速度能很好跟踪其理想值。
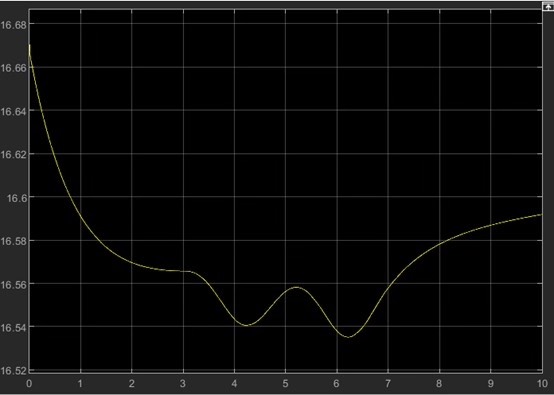
可输出横向位移、车速、相平面、横摆角速度等参数变量。
ID:93299722550573299
1874发哥
基于AFS和DYC集成控制的分布式驱动电动汽车
随着科技的不断进步和社会对环保性的追求,电动汽车作为一种新兴的交通工具逐渐得到了广泛的关注和应用。然而,传统的集中式驱动方式在电动汽车中存在一些缺陷,如单一故障点造成整车失效、动力传输效率低下等问题。为解决这些问题,基于AFS和DYC集成控制的分布式驱动电动汽车应运而生。
在分布式驱动电动汽车中,汽车的每个轮子都搭载了一个独立的电机,通过控制电机的输出扭矩实现对汽车的操控。AFS模块和DYC模块是分布式驱动系统的核心组成部分,它们基于滑模变结构控制理论,能够实现横摆角速度的优秀跟踪性能。
AFS模块负责控制汽车的横向位移和横摆角速度。通过横向位移和横摆角速度的测量,AFS模块能够计算出所需的横向力,并通过控制每个轮子的输出扭矩使得汽车实现所需的横向行驶轨迹。通过AFS模块的控制,分布式驱动电动汽车在弯道行驶时能够更加稳定和灵活,减少了车辆的侧滑和失控的风险。
DYC模块负责控制汽车的纵向加速度和车速。通过测量车辆的纵向加速度和车速,DYC模块可以根据车辆的动力需求计算出每个轮子的输出扭矩,从而实现对车辆的加速和减速控制。在启动时,DYC模块能够实现良好的驱动力分配,使得车辆能够迅速而平稳地启动。在制动时,DYC模块能够实现制动力的均衡分配,使得车辆的制动稳定而可控。
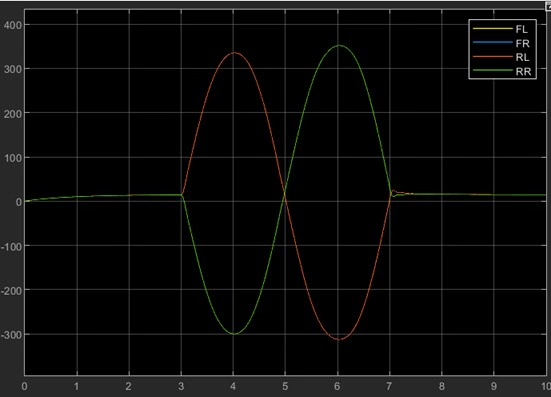
扭矩分配模块负责根据车辆当前的操控需求和路面状态,将相应的扭矩分配给每个轮子,以优化车辆的性能和操控稳定性。驾驶员模型和理想车辆模型则提供了对真实驾驶员和车辆行为的建模,以便更好地评估分布式驱动电动汽车在不同工况下的性能和操控特性。
通过Simulink与CarSim联合仿真,可以对基于AFS和DYC集成控制的分布式驱动电动汽车进行全面的性能评估。仿真结果可以包括横向位移、车速、相平面、横摆角速度等参数变量的输出,从而可以更加直观地了解分布式驱动电动汽车在不同场景下的运行情况。
综上所述,基于AFS和DYC集成控制的分布式驱动电动汽车具有较好的操控性能和稳定性。通过AFS模块和DYC模块的优化控制,分布式驱动电动汽车能够更好地适应不同的道路条件和驾驶需求,并且能够实现横向位移和横摆角速度的精准控制。通过Simulink与CarSim联合仿真,可以更加直观地评估分布式驱动电动汽车的性能和操控特性,为电动汽车的研发和应用提供了有力的支持。
【相关代码,程序地址】:http://fansik.cn/722550573299.html
















 617
617











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









