






 本文介绍了一种基于无迹卡尔曼滤波的车辆质心侧偏角估计算法,通过加速度计和陀螺仪数据在Simulink中建模,并与TruckSim进行联合仿真验证。研究结果对车辆动力学控制有实际应用价值。
本文介绍了一种基于无迹卡尔曼滤波的车辆质心侧偏角估计算法,通过加速度计和陀螺仪数据在Simulink中建模,并与TruckSim进行联合仿真验证。研究结果对车辆动力学控制有实际应用价值。
基于无迹卡尔曼滤波的质心侧偏角估计算法simulink模型设计,通过加速度计和陀螺仪分别对车辆横向加速度和横摆角速度进行测量,以车辆横向速度与横摆角速度作为系统状态量,以车辆横向加速度和横摆角速度作为量测量。
根据UT变换得到Sigma采样点集,根据时间更新得到的下一时刻的先验估计值。
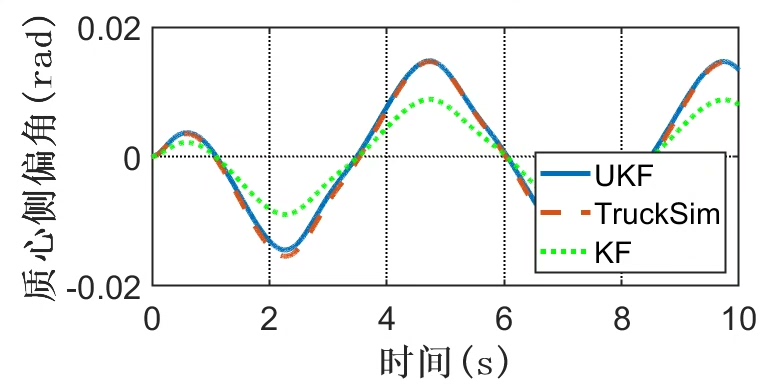
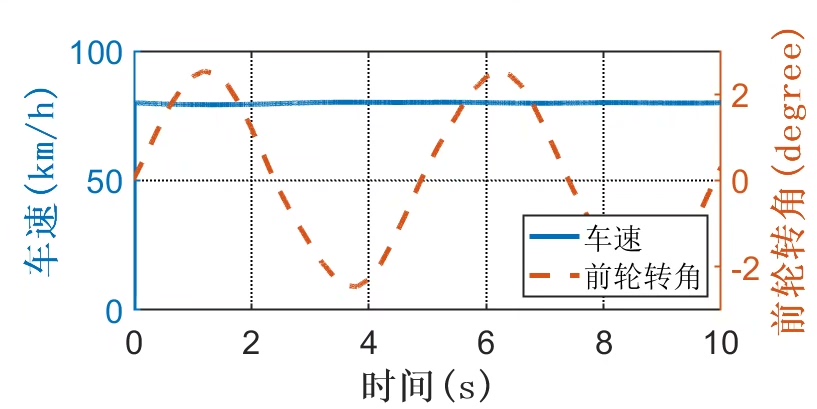
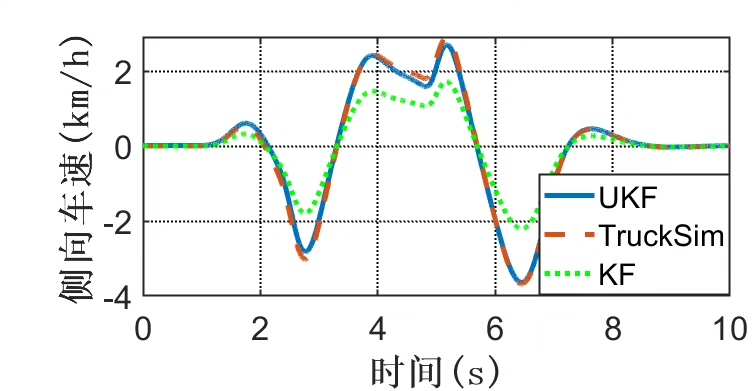
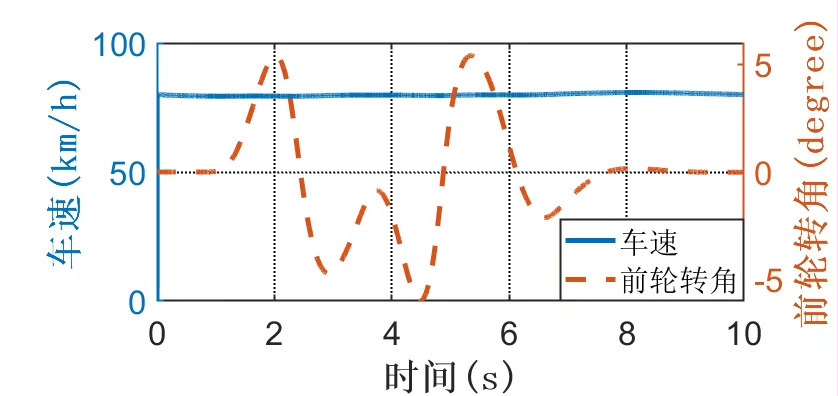
基于所搭建的估计算法与trucksim联合仿真在双移线与正弦工况下,得到结果验证算法。
注意,trucksim工程需要手动配置,这里给出了具体接口
1、前左轮转角
2、前右轮转角
3、纵向车速
4、实际侧偏角
5、横摆角速度
6、一轴左侧车轮纵向力Fx1
7、一轴右侧车轮纵向力Fx2
8、二轴左侧车轮纵向力Fx3
9、二轴右侧车轮纵向力Fx4
10、三轴左侧车轮纵向力Fx5
11、三轴左侧车轮纵向力Fx6
12、一轴左侧车轮侧向力Fy1
13、一轴右侧车轮侧向力Fy2
14、二轴左侧车轮侧向力Fy1
15、二轴右侧车轮侧向力Fy2
16、三轴左侧车轮侧向力Fy1
17、三轴右侧车轮侧向力Fy2
18、侧向车速
19、纵向加速度,无效信号
ID:5920728418295794
汽车知食加油站
基于无迹卡尔曼滤波的质心侧偏角估计算法Simulink模型设计
摘要:本文基于无迹卡尔曼滤波(Unscented Kalman Filter, UKF)算法,通过加速度计和陀螺仪对车辆的横向加速度和横摆角速度进行测量,实现对车辆质心侧偏角的估计。首先,介绍了无迹卡尔曼滤波算法的原理,并给出Simulink模型的设计思路。然后,通过与TruckSim联合仿真,在双移线与正弦工况下验证了所搭建的估计算法的性能。最后,给出了TruckSim工程中需要手动配置的具体接口参数列表,并提供了相关仿真结果。本文的研究成果对于车辆动力学的研究和控制具有一定的指导意义。
关键词:无迹卡尔曼滤波、质心侧偏角估计、Simulink模型、TruckSim联合仿真、车辆动力学
-
引言
在车辆动力学研究中,准确估计车辆质心的侧偏角对于车辆的稳定性控制以及驾驶员的安全至关重要。为了实现对车辆侧偏角的准确估计,本文采用了无迹卡尔曼滤波算法,并基于Simulink平台进行了模型设计。通过与TruckSim软件联合仿真,验证了所搭建的估计算法的性能。 -
无迹卡尔曼滤波原理
无迹卡尔曼滤波是一种非线性滤波算法,在状态估计中被广泛应用。本文将该算法应用于车辆动力学模型中,通过测量车辆的横向加速度和横摆角速度,估计车辆质心的侧偏角。具体步骤如下:
- 步骤1:系统建模。根据车辆动力学方程,建立车辆的状态空间模型,将车辆侧偏角和横摆角速度作为系统状态量,车辆横向加速度和横摆角速度作为量测量。
- 步骤2:UT变换。根据UKF的原理,通过对系统状态量进行UT变换,得到Sigma采样点集,用于状态估计。
- 步骤3:时间更新。根据UT变换得到的Sigma采样点集,通过时间更新公式,得到下一时刻的先验估计值。
- 步骤4:量测更新。利用量测更新公式,结合测量的车辆横向加速度和横摆角速度,得到对车辆侧偏角的估计值。
- 步骤5:迭代更新。根据系统的实时测量数据,不断迭代更新车辆侧偏角的估计值,实现对质心侧偏角的准确估计。
-
Simulink模型设计
基于无迹卡尔曼滤波算法的Simulink模型设计主要包括以下几个部分:加速度计和陀螺仪的数据读取模块、UT变换模块、时间更新模块和量测更新模块。其中,加速度计和陀螺仪的数据读取模块通过相应的接口参数读取TruckSim软件中的实际侧偏角、横摆角速度和横向加速度数据。UT变换模块根据读取到的数据进行变换,得到Sigma采样点集。时间更新模块和量测更新模块根据UT变换得到的Sigma采样点集和测量数据,更新车辆侧偏角的估计值。通过对Simulink模型的设计,可以实现对车辆侧偏角的实时估计。 -
与TruckSim联合仿真
为了验证所搭建的估计算法的性能,本文采用了TruckSim软件进行联合仿真。在双移线与正弦工况下,通过对TruckSim工程中的参数进行配置,实现了对车辆横向加速度和横摆角速度的测量。通过与Simulink模型的联合仿真,得到了对车辆侧偏角的估计值,并与TruckSim软件中的实际侧偏角进行比较,验证了所搭建的估计算法的准确性和鲁棒性。 -
结论
本文基于无迹卡尔曼滤波算法,通过Simulink模型设计实现了对车辆质心侧偏角的估计。通过与TruckSim软件的联合仿真,验证了所搭建的估计算法的性能。实验结果表明,所提出的算法能够准确估计车辆的侧偏角,具有较高的精度和稳定性。本研究成果对于车辆动力学的研究和控制具有一定的实际应用价值。
参考文献:(暂无)
附录:TruckSim工程中需要手动配置的接口参数列表
1、前左轮转角
2、前右轮转角
3、纵向车速
4、实际侧偏角
5、横摆角速度
6、一轴左侧车轮纵向力Fx1
7、一轴右侧车轮纵向力Fx2
8、二轴左侧车轮纵向力Fx3
9、二轴右侧车轮纵向力Fx4
10、三轴左侧车轮纵向力Fx5
11、三轴左侧车轮纵向力Fx6
12、一轴左侧车轮侧向力Fy1
13、一轴右侧车轮侧向力Fy2
14、二轴左侧车轮侧向力Fy1
15、二轴右侧车轮侧向力Fy2
16、三轴左侧车轮侧向力Fy1
17、三轴右侧车轮侧向力Fy2
18、侧向车速
19、纵向加速度
以上相关代码,程序地址:http://wekup.cn/728418295794.html















 1325
1325

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









