






- 配置CUDA环境
- 1 安装cuda toolkit
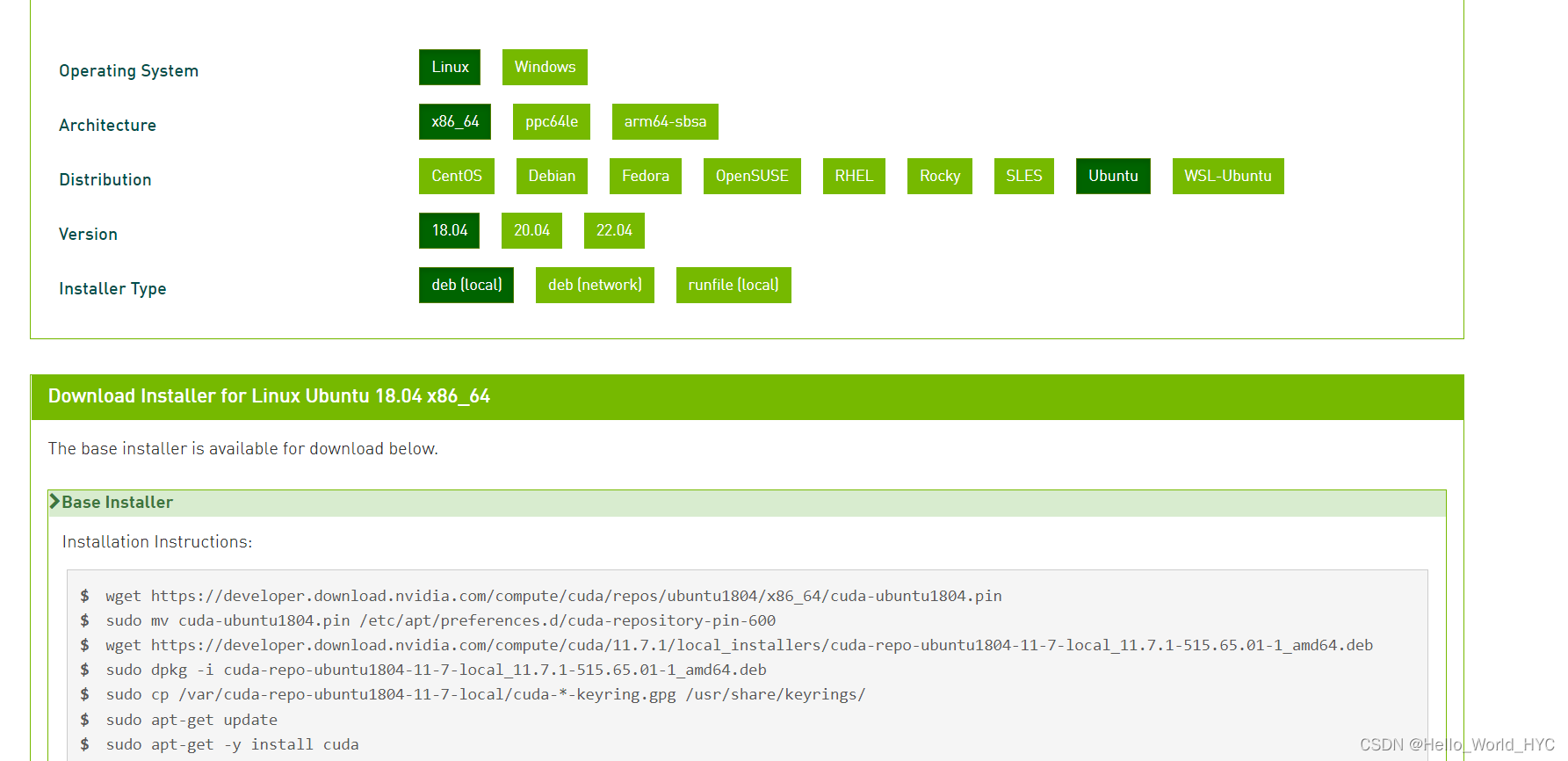
进入https://developer.nvidia.com/cuda-toolkit-archive 中选择对应的工具包版本,根据下面的安装命令逐一输入,即可完成安装。
 使用
使用
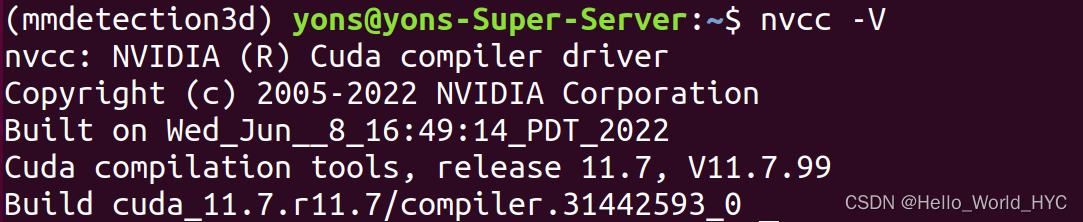
nvcc -V查看cuda版本,当前cuda版本为11.7
- 2 安装cuDnn
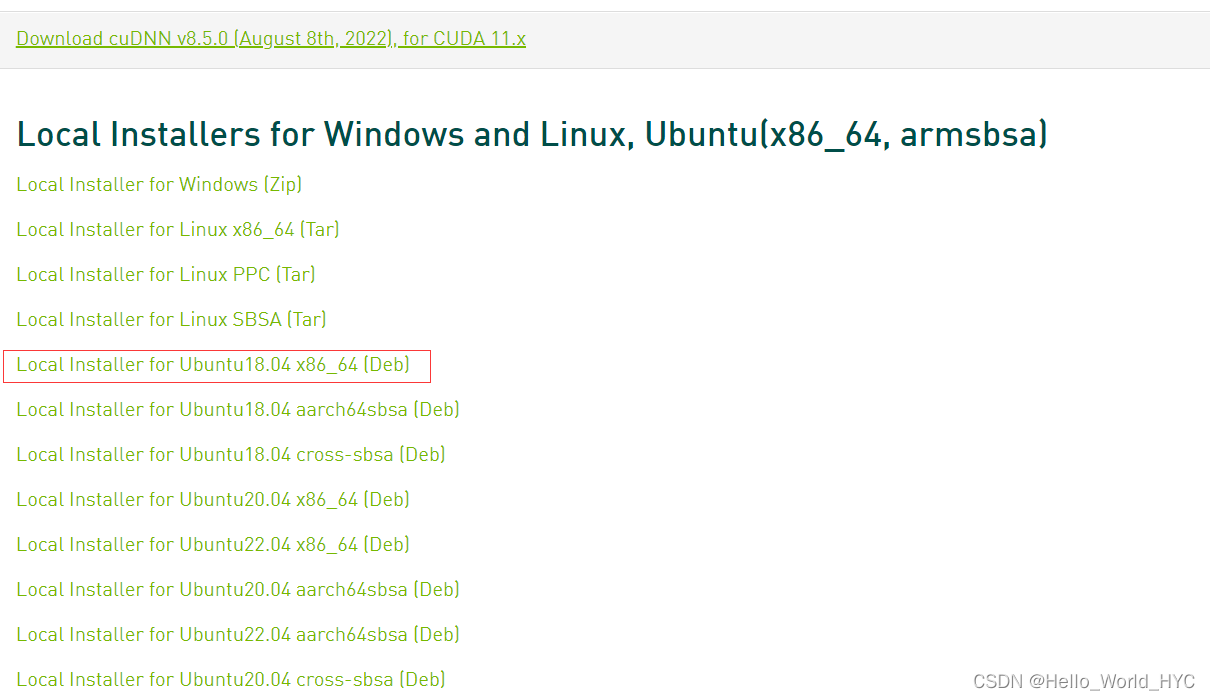
从官网下载cudnn压缩包,将解压出来的lib64和include中所有的内容都拷贝到/usr/local/cuda的lib64和include中
 查看cudnn版本,这里显示cudnn版本为8.5.0
查看cudnn版本,这里显示cudnn版本为8.5.0
cat /usr/local/cuda-11.7/include/cudnn_version.h | grep CUDNN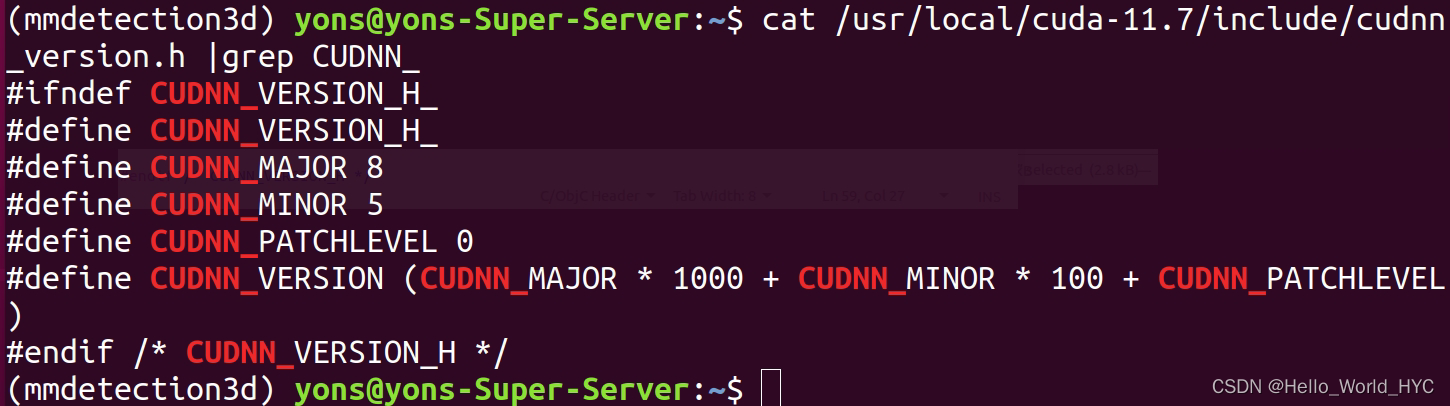
2. 配置pytorch环境
2.1 先创建一个名为mmdetection3d的虚拟环境,用来配置mmdetection3d,python版本为3.8
conda create -n mmdetection3d python=3.8
2.2 安装完成后,激活该虚拟环境
conda activate mmdetection3d
2.3 安装pytorch
进入pytorch官网选择合适的pytorch版本
conda install pytorch torchvision torchaudio pytorch-cuda=11.7 -c pytorch -c nvidia
至此,pytorch环境安装完成
3. 搭建mmdetection3d环境
3.1 通过pip安装openmim,mim是OpenMMLab的包管理工具。
pip3 install openmim 
3.2 通过mim 安装mmcv-full,
mim install mmcv-full
3.3 接下来通过mim安装mmdet
3.4 通过mim安装mmsegmentation
3.5 通过git拉取mmdetection3d库

3.6进入mmdetection3d文件夹安装库依赖
4. 验证
下载预训练模型,下载地址为https://download.openmmlab.com/mmdetection3d/v0.1.0_models/second/hv_second_secfpn_6x8_80e_kitti-3d-car/hv_second_secfpn_6x8_80e_kitti-3d-car_20200620_230238-393f000c.pth
新建checkpoints目录,将下载下来的模型文件放入该目录。
4.1运行测试脚本进行验证
运行完成之后,demo文件夹下会产生一个kitti_000008文件夹,包含kitti_000008_points.obj和 kitti_000008_pred.obj两个obj文件。前者是点云文件,后者是检测的三维结果。这两个文件可以直接拖入到CloudCompare软件中进行显示。

CloudCompare软件
cloudcompare是一个点云可视化的软件,并且可以完成一些基础的点云操作。软件界面如图所示:
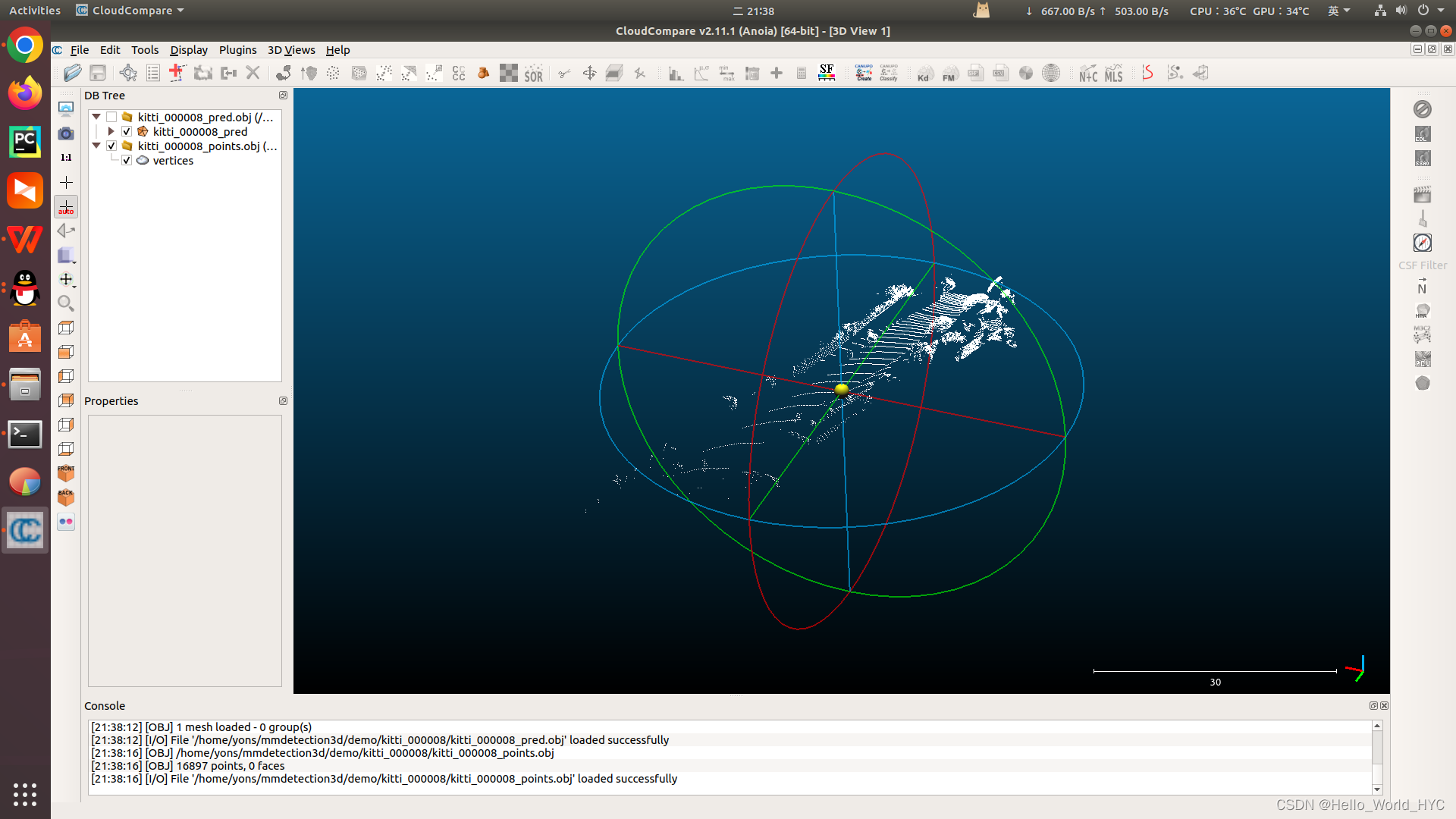
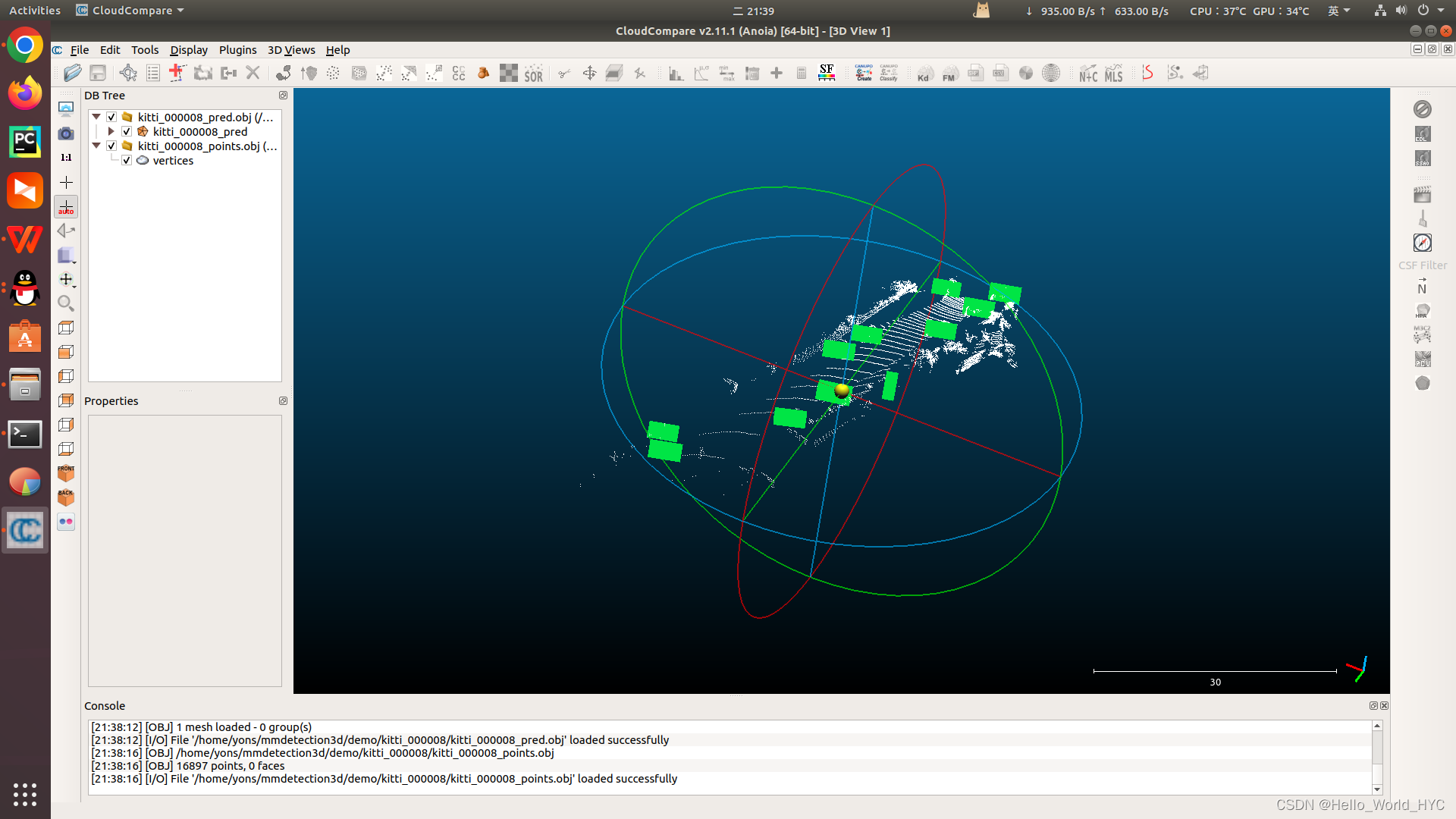
验证结果显示如下图所示:
点云文件
预测文件

















 902
902

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









