






原创 | 文 BFT机器人

《TEASER: Fast and Certifiable Point Cloud Registration》是一篇由Yang et al. 在IEEE Transactions on Robotics杂志上发表的研究论文,于2021年4月出版。这篇论文提出了两种快速且可验证的点云配准算法:TEASER和TEASER++,这两种算法能够处理高异常值率的情况,并在点云配准任务中表现出色。本文对论文内容进行详细的分析解读,着重介绍了论文的背景、目标、方法、实验结果和贡献。
01
背景和目标
点云配准是计算机视觉和机器人领域中一个重要的问题,它涉及将两个或多个点云数据集对齐,以获得它们之间的相对姿态变换。然而,现实世界中的点云数据通常包含噪声和异常值,这使得点云配准任务变得更加困难。
因此,对于处理高异常值率的点云配准问题,研究人员需要开发更加鲁棒和可靠的算法。目标就是解决高异常值率的点云配准问题,提出两种快速且可验证的算法:TEASER和TEASER++。TEASER算法通过求解大规模半定规划问题来实现准确的鲁棒配准,但计算复杂度较高。
为了加速配准过程,作者提出了TEASER++算法,它避免了求解半定规划问题,从而大大提高了运行速度。此外,作者还引入了“可验证感知”这一新兴研究领域的概念,旨在为机器感知算法提供更高的可靠性和安全性。
02
工作内容
1. TEASER算法
TEASER算法是一种准确且鲁棒的点云配准算法。它利用估计理论、几何学、图论和优化等多个领域的思想,实现了对高异常值率数据的鲁棒处理。
算法主要包含以下几个步骤:
-
随机选择一些点对作为初始的匹配对。
-
根据初始匹配对构建一个大图,并使用图论中的最大团算法找出最大的一组一致的匹配对。
-
基于最大团中的匹配对,通过最小二乘法计算刚体变换。
-
利用已估计的刚体变换更新匹配对,并迭代执行上述步骤,直到收敛。
然而,由于TEASER需要求解大规模半定规划问题,算法的计算复杂度较高,不适用于大规模点云数据。
2. TEASER++算法
为了加速配准过程,作者提出了TEASER++算法,它是TEASER算法的优化版本。TEASER++算法在保持准确性和鲁棒性的基础上,避免了求解大规模半定规划问题,从而大大提高了运行速度。TEASER++算法的关键在于使用图论中的最大团算法来寻找一致的匹配对,从而避免了求解半定规划问题。
TASER++算法的流程如下:
-
对所有点对计算刚体变换,并将它们构建为一个图。
-
利用最大团算法找出最大一致子图,即最大的一组一致的匹配对。
-
利用最大一致子图来估计刚体变换,并使用最小二乘法进行优化。
-
更新匹配对并迭代执行上述步骤,直到收敛。
TEASER++算法不仅保持了TEASER算法的准确性和鲁棒性,而且大大提高了运行速度,特别适用于处理高异常值率的大规模点云数据。
3. 可验证感知
本文还介绍了“可验证感知”这一新兴研究领域的概念。可验证感知旨在为机器感知算法提供更高的可靠性和安全性。可验证感知的关键在于开发可验证的算法,即能够提供对结果可靠性的证明,从而增强对感知算法的信任。
03
实验结果
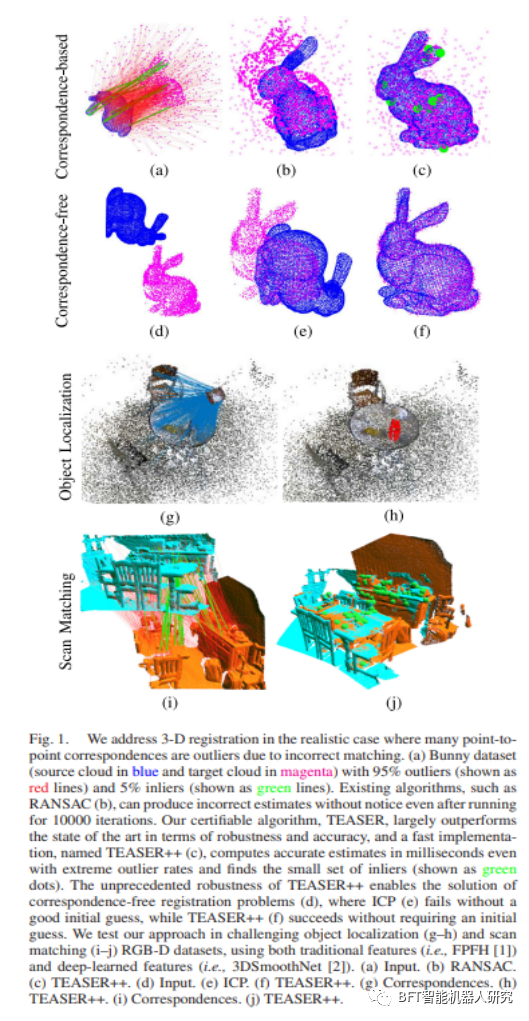
论文通过多个实验验证了TEASER和TEASER++算法的性能。实验结果表明,这两种算法在标准测试数据集上优于现有的配准算法,并且能够在高异常值率下表现出色。
它们不仅可以处理点云配准问题,还可以用于目标姿态估计、扫描匹配等实际应用。同时,作者还提供了一个快速的C++实现供开发者使用。
在实验中,TEASER++算法表现出比TEASER算法更快的速度,并且在准确性和鲁棒性方面与TEASER算法相当。TEASER++算法还能处理没有对应关系的点云配准问题,即使在这种情况下,它的表现仍然优于现有的配准算法。此外,通过证明算法的结果可靠性,论文还验证了TEASER++算法的可靠性和安全性,使其成为可验证感知领域的重要研究方向。
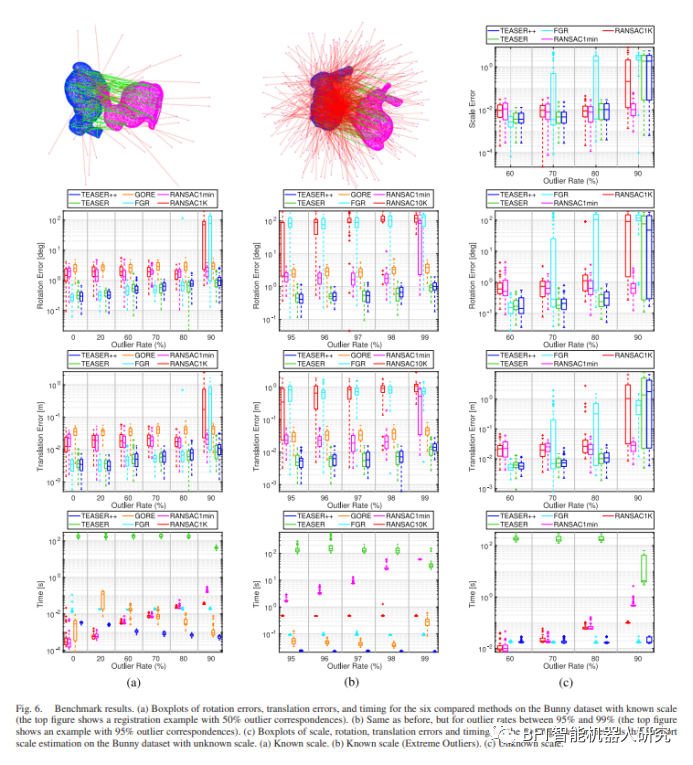
在对比实验中,作者将TEASER++算法与其他先进的点云配准算法进行了比较,包括Go-ICP、RANSAC、Fast Global Registration (FGR)和Generalized-ICP (G-ICP)等。实验结果显示,TEASER++算法在不同数据集上均取得了优越的配准性能。特别是在高异常值率的情况下,TEASER++算法明显优于其他算法,这充分说明了它在处理噪声和异常值时的鲁棒性。
此外,论文还对TEASER++算法的运行时间进行了评估,结果显示该算法的运行速度非常快,特别适用于大规模点云数据的配准任务。因此,TEASER++算法不仅在准确性和鲁棒性方面表现优异,还具备了高效的优势,使得它成为实际应用中非常有价值的算法。
04
贡献
本文的贡献主要有以下几点:
1. 提出了TEASER算法和TEASER++算法,这两种算法能够处理高异常值率的点云配准问题,并在准确性和鲁棒性方面表现出色。TEASER++算法作为优化版本,在保持准确性的同时,大大提高了配准速度,适用于大规模点云数据。
2. 引入了“可验证感知”这一新兴研究领域的概念,探讨了机器感知算法的可靠性和安全性问题。TEASER++算法的可验证性为可验证感知领域的研究提供了新的思路和方法。
3. 在多个实验中验证了TEASER算法和TEASER++算法的性能,并与其他先进算法进行了比较。实验结果表明,这两种算法在点云配准任务中具备明显的优势,尤其在处理高异常值率的情况下更为明显。
4. 提供了快速的C++实现,方便其他研究者和开发者使用和拓展这两种算法。
05
结论
《TEASER: Fast and Certifiable Point Cloud Registration》是一篇在点云配准领域具有重要意义的论文。通过提出TEASER算法和TEASER++算法,论文解决了高异常值率点云配准的难题,并在准确性和鲁棒性方面取得了显著的成果。TEASER++算法作为优化版本,不仅保持了准确性和鲁棒性,还大大提高了配准速度,适用于大规模点云数据。
此外,论文引入了“可验证感知”领域的概念,强调了算法可验证性的重要性,为该领域的研究提供了新的思路和方向。
综上所述,TEASER算法和TEASER++算法为点云配准问题的解决提供了有力的工具和方法,并对可验证感知领域的发展做出了积极贡献。该论文的研究成果对于推动计算机视觉和机器人领域的发展具有重要的意义。未来,我们可以期待在这一研究方向上的更多进展和应用。
作者 | 胡财荣
排版 | 居居手
更多精彩内容请关注公众号:BFT机器人
本文为原创文章,版权归BFT机器人所有,如需转载请与我们联系。若您对该文章内容有任何疑问,请与我们联系,将及时回应。














 2195
2195











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









