






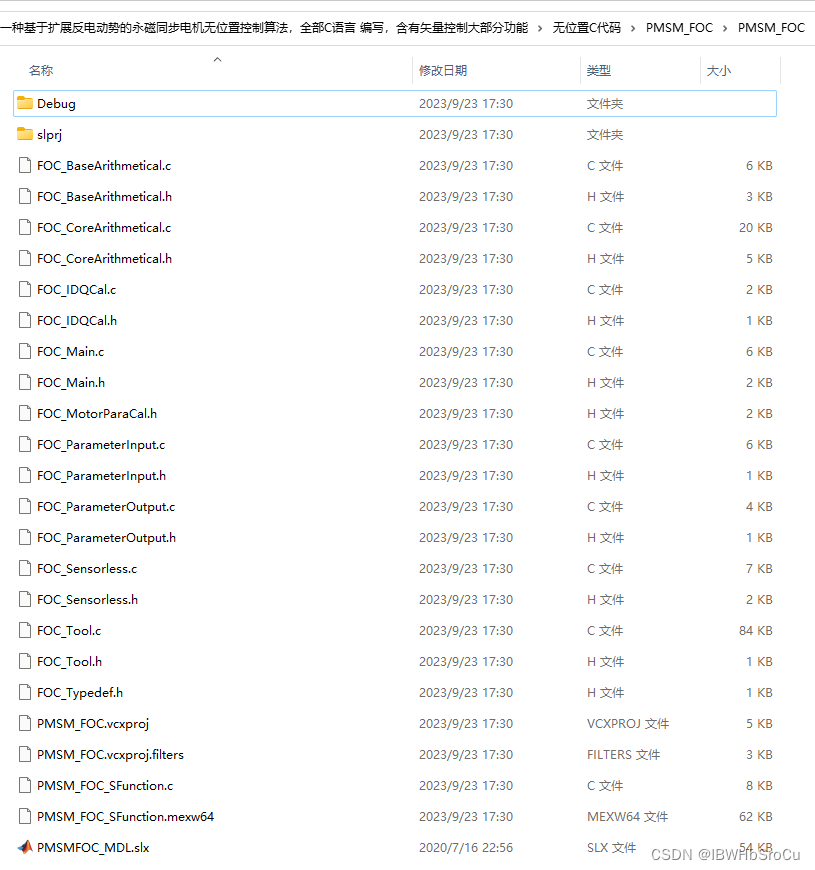
一种基于扩展反电动势的永磁同步电机无位置控制算法,全部C语言 编写,含有矢量控制大部分功能(弱磁,解耦,过调制,死区补偿等)
为了方便学习和工作,该产品结合S-Function进行仿真,且属于量产产品级,已经在多个项目中应用,欢迎拿后,并赠送多种无位置纯仿真模型(包含滑膜,高频注入,MRAS,龙贝格等)
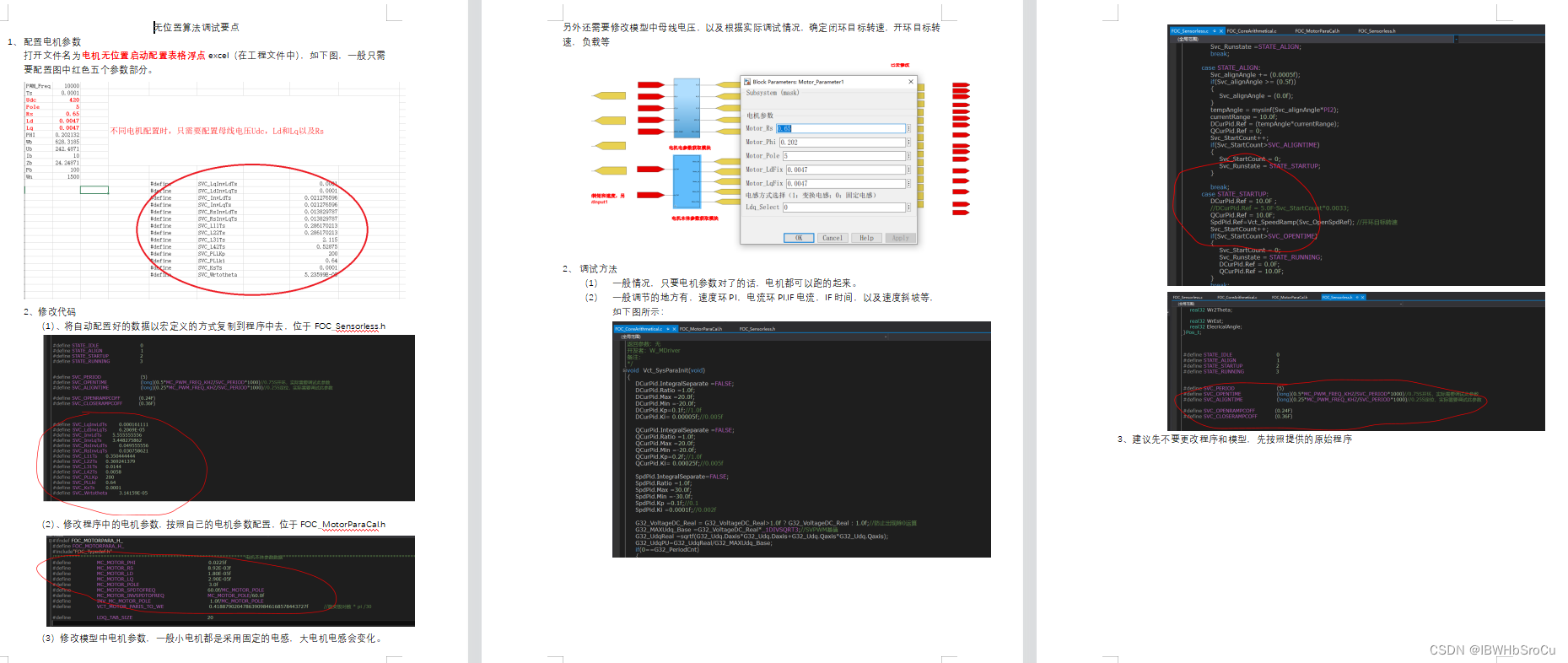

扩展反电动势控制算法在永磁同步电机领域中备受关注。该算法通过观测电机的扩展反电动势信号,无需传感器即可实现电机的无位置控制。本文将介绍一种基于扩展反电动势的永磁同步电机无位置控制算法,全部采用C语言编写,并且包含矢量控制的大部分功能,如弱磁、解耦、过调制、死区补偿等。
该算法的实现基于观测电机的扩展反电动势信号。扩展反电动势是电机在运行中产生的一种信号,它与电机的转速和转子位置息息相关。通过采集电机的扩展反电动势信号,可以实时计算出电机的转速和转子位置,从而实现无位置控制。与传统的位置传感器相比,扩展反电动势控制算法可以减少硬件的成本和维护成本,提高电机系统的可靠性和稳定性。
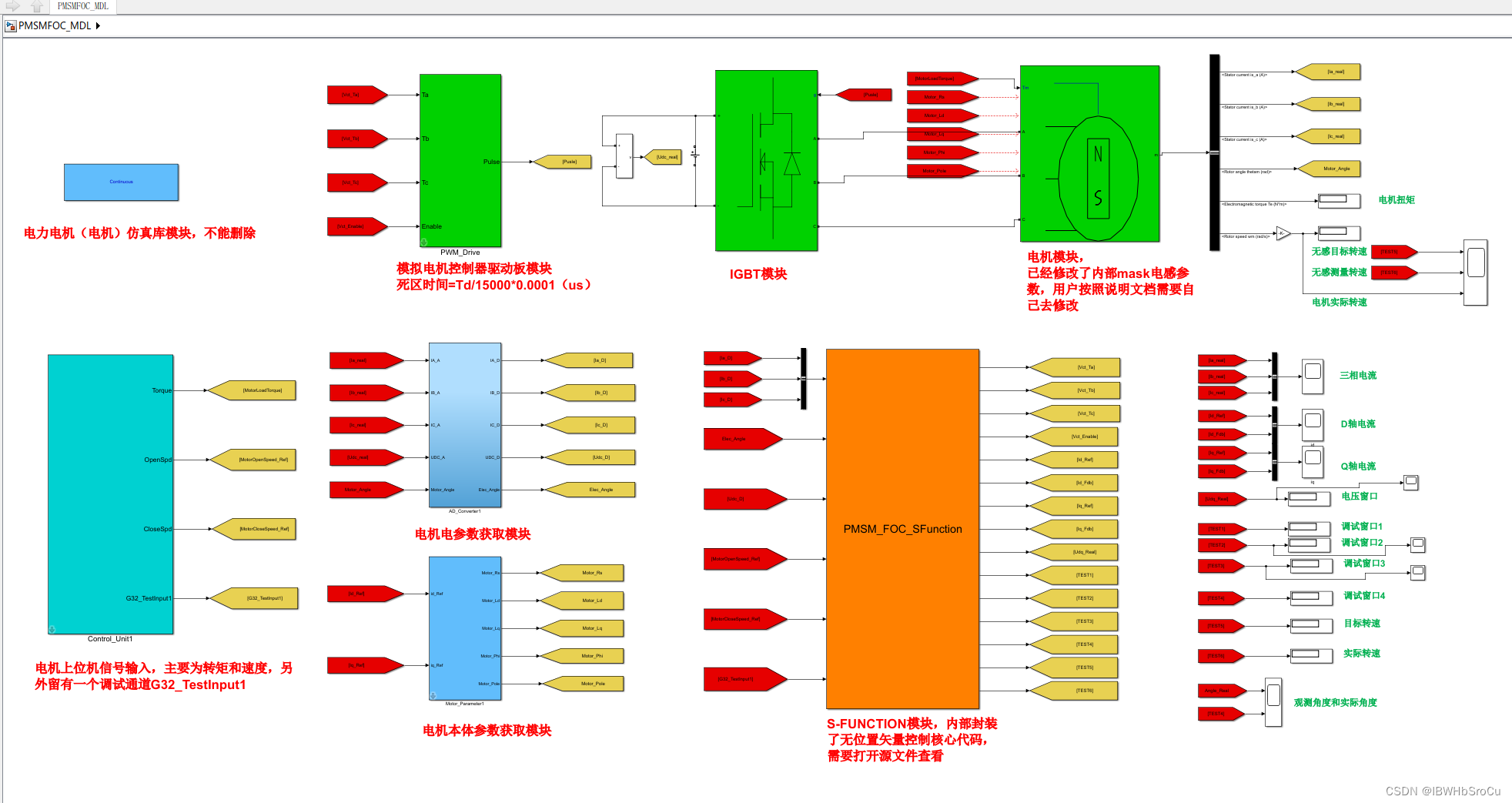
为了方便学习和工作,我们的算法结合了S-Function进行仿真,并且已经达到了量产产品级别的水平。经过多个项目的应用验证,该算法在实际应用中表现出了良好的控制性能和稳定性。另外,我们还赠送了多种无位置纯仿真模型,包含滑膜、高频注入、MRAS、龙贝格等,方便大家进行深入学习和研究。
在实现算法过程中,我们注重了代码的清晰度和可读性,采用了良好的软件工程方法和代码规范。我们的C语言代码整洁有序,代码风格统一,易于维护和扩展。同时,我们也对算法的实现过程进行了详细的分析和阐述,使读者在学习过程中能够领悟其内在的技术原理和思想。
总之,基于扩展反电动势的永磁同步电机无位置控制算法是一种非常有前景的技术。本文通过详细介绍算法的实现原理和应用效果,期望能够为同行们提供一些有益的启示和参考,促进永磁同步电机无位置控制技术的进一步发展。
相关代码,程序地址:http://lanzouw.top/991000009793.html















 978
978











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









