






基于人工势场算法的 2DOF 机器人动画避障的 MATLAB 实现
可以通过GUI引入初始末端执行器位置、目标末端执行器位置、障碍物位置和机器人底座的坐标。
可以通过 GUI 选择 2DOF 动画操纵器的障碍物半径和链接长度。
程序包运行
ID:46200724506973964
请叫我醉04551

基于人工势场算法的2DOF机器人动画避障的MATLAB实现
一、引言
在机器人领域,避障技术是一个重要的研究方向。特别是在2自由度(2DOF)机器人中,由于其结构和运动的限制,如何在有限的自由度下实现有效的避障成为了一个挑战。本文介绍了基于人工势场算法的2DOF机器人动画避障的MATLAB实现,并通过图形用户界面(GUI)进行参数设置和动画展示。
二、人工势场算法概述
人工势场算法是一种常用的机器人路径规划算法。它将机器人所处的环境视为一个势场,目标位置对机器人产生吸引力,而障碍物则对机器人产生排斥力。机器人通过这两个力的合力来确定其运动方向和速度,从而实现在环境中的路径规划和避障。
三、2DOF机器人动画避障的MATLAB实现
- GUI设计
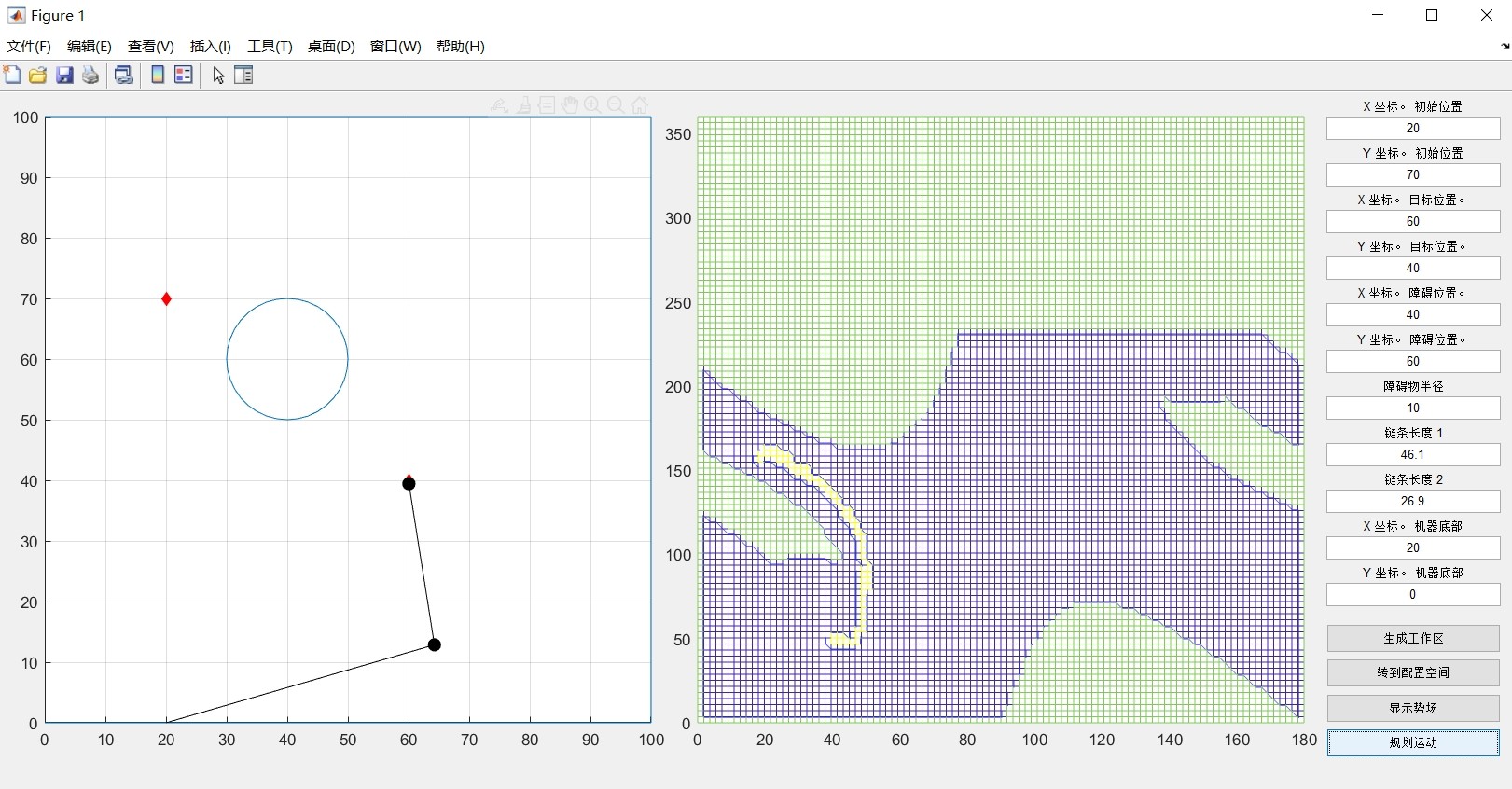
为了实现参数的方便设置和动画的直观展示,我们采用MATLAB的GUI设计工具来设计界面。GUI界面包括以下几个部分:
- 初始末端执行器位置:通过坐标输入框设置机器人起始点的位置。
- 目标末端执行器位置:通过坐标输入框设置机器人目标点的位置。
- 障碍物位置:通过坐标输入框设置障碍物的位置。
- 机器人底座坐标:通过坐标输入框设置机器人底座的位置。
- 障碍物半径和链接长度:通过滑动条或数值输入框设置障碍物的半径和机器人的链接长度。
- 人工势场算法实现
在MATLAB中,我们根据人工势场算法的原理,编写了相应的算法代码。代码主要包括以下几个部分:
- 吸引力计算:根据目标位置计算对机器人的吸引力。
- 排斥力计算:根据障碍物位置计算对机器人的排斥力。
- 合力计算:将吸引力和排斥力合成,得到对机器人的合力。
- 运动控制:根据合力控制机器人的运动方向和速度。
- 动画展示
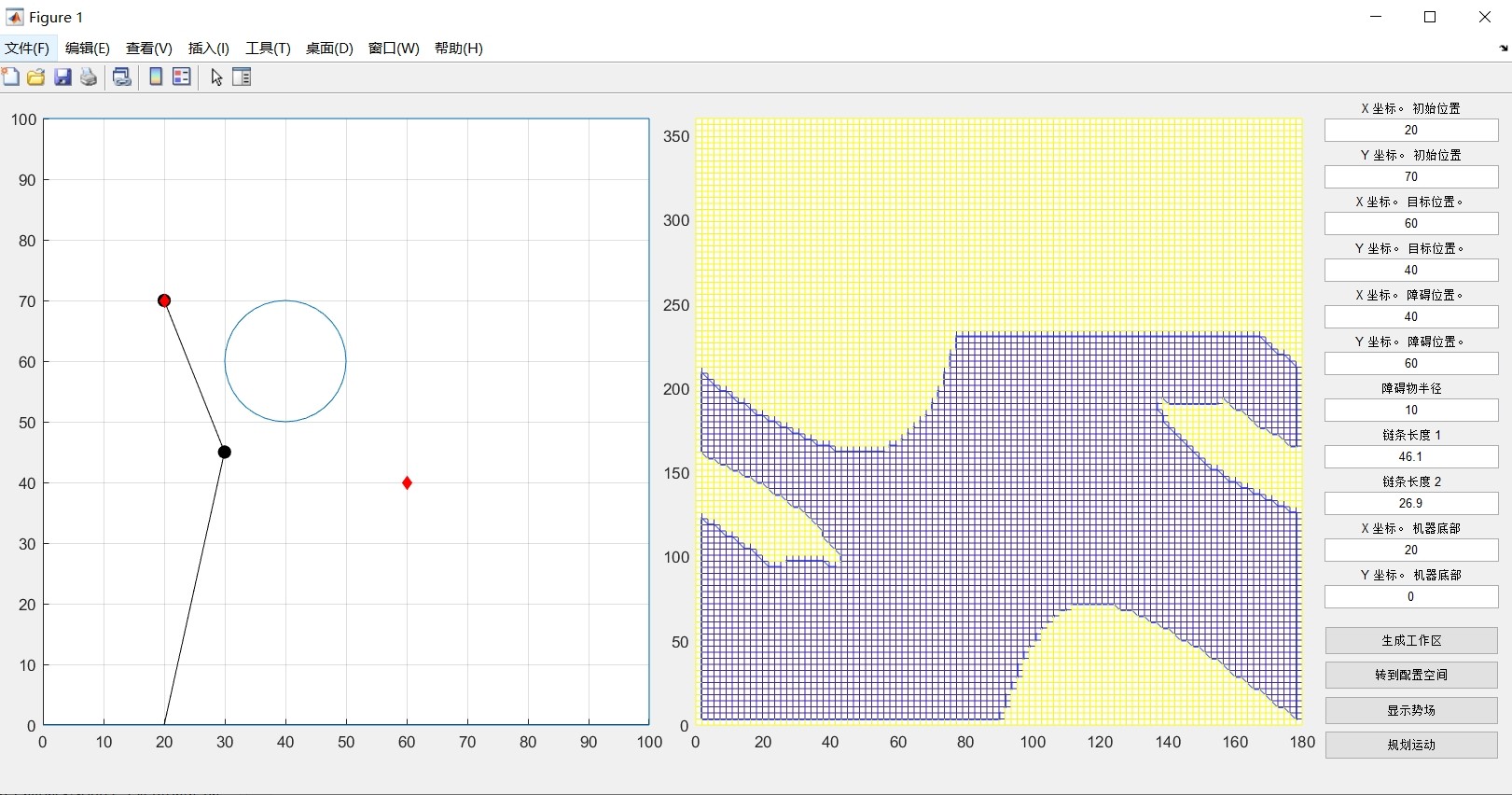
为了直观地展示机器人的避障过程,我们使用了MATLAB的动画功能。通过不断更新机器人的位置和状态,并绘制出机器人的运动轨迹和障碍物的位置,我们可以在GUI界面中实时观察到机器人的避障过程。
四、程序包运行
- 下载和安装
用户可以从相关网站下载本程序的压缩包,解压后得到包含MATLAB代码和GUI界面的文件夹。用户需要确保自己的电脑已经安装了MATLAB软件。
- 运行程序
双击文件夹中的.m文件,即可在MATLAB中运行程序。程序将自动打开GUI界面,用户可以在界面中设置参数并观察动画效果。
- 注意事项
- 确保MATLAB软件版本与代码兼容。
- 在设置参数时,注意输入正确的坐标和数值。
- 在观察动画时,注意观察机器人的运动轨迹和障碍物的位置。
五、结论
本文介绍了基于人工势场算法的2DOF机器人动画避障的MATLAB实现。通过GUI设计,用户可以方便地设置参数并观察动画效果。这种方法为2DOF机器人的避障研究和应用提供了一种有效的工具。
六、未来工作
未来,我们可以考虑将这种方法应用到更复杂的机器人系统中,如3DOF或多自由度机器人。同时,我们还可以考虑将其他路径规划算法与人工势场算法结合,以实现更高效的避障。
七、致谢
感谢MATLAB软件提供的强大功能,使得我们可以方便地进行GUI设计和动画展示。同时,也感谢所有为本文付出时间和精力的研究人员和同行。
八、参考文献
[此处列出相关参考文献]
九、附录
[此处可附上相关图表、数据等]
具体的代码,程序如下地址:http://wekup.cn/724506973964.html
















 2902
2902

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









