









奈奎斯特准则与带限信道可行的码元速率探究(篇一):什么是码间串扰
写在前:
本篇是《奈奎斯特准则与带限信道可行的码元速率探究》的篇一,基础知识部分。介绍了码间串扰的基本概念和原理。篇二介绍了码间串扰的解决,参见基带传输系统的奈奎斯特准则与奈奎斯特速率。
为了探究信道上可行的码元速率,我们首先要从码间串扰(inter-symbol interference,ISI)谈起。
对于信道,我们期待它是理想的对原信号不产生任何变形,其(归一化)频率响应 C ( f ) C(f) C(f)被期待为处处为1,即相应的时域上,其(归一化)冲击响应为 c ( t ) = δ ( t ) c(t)=\delta(t) c(t)=δ(t)。
但实际上,信道通常只在某个给定的带宽内保持平坦,其(归一化)频率响应不是对所有频率 f f f都恒为1。更进一步,我们不妨广泛地考虑任何形式的非理想信道,它们的频率响应表现为 C ( f ) ≠ 1 C(f)\neq1 C(f)̸=1,相应的冲激响应记为 c ( t ) ≠ δ ( t ) c(t)\neq\delta(t) c(t)̸=δ(t),如图1中所示的信道。

从图1可以清楚地反映出ISI的物理意义是“码元彼此间的串扰”。码间串扰是由于系统传输总特性不理想,导致前后码元的波形畸变、展宽,并使前面波形出现很长的拖尾,蔓延到当前码元的抽样时刻上,从而对当前码元的判决造成干扰。
下面我们进行更为具体的探讨:
数字脉冲幅度调制(PAM)传输系统的整体框图如图2所示。其中,发送滤波器的传递函数为
G
T
(
f
)
G_T(f)
GT(f),冲激响应为
g
T
(
t
)
g_T(t)
gT(t);接收滤波器的传递函数为
G
R
(
f
)
G_R(f)
GR(f),冲激响应为
g
R
(
t
)
g_R(t)
gR(t)。
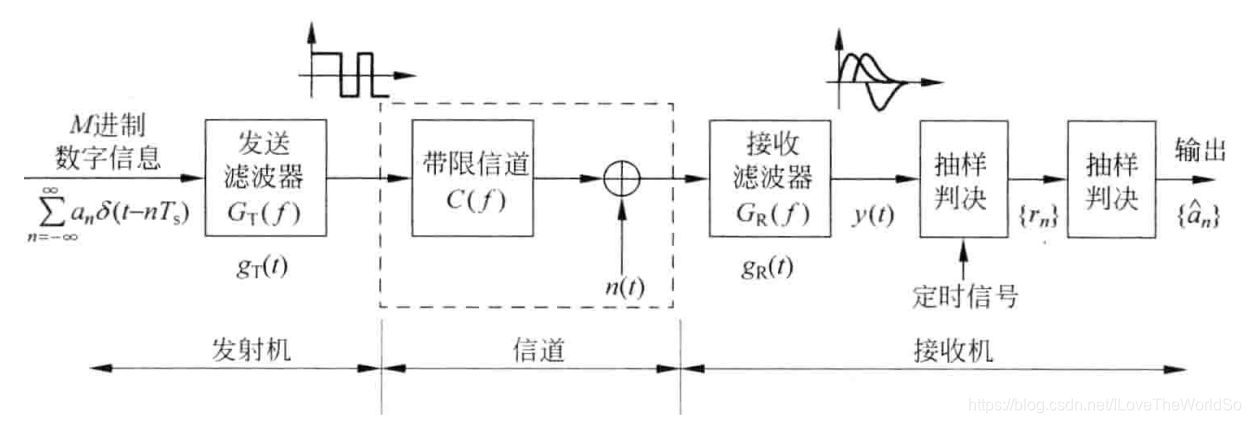
我们发现从 a n { a_n } an到 a ^ n \hat{a}_n a^n的传输过程中,各个脉冲信号经过信道与接收滤波器后可能发生不期望的变形,从而影响接收。下面仔细分析这个问题。
容易看到,信道
C
(
f
)
C(f)
C(f)的影响完全反映在
y
(
t
)
y(t)
y(t)的抽样值
r
n
r_n
rn中,而经过接收滤波器后的输出信号为:
y
(
t
)
=
{
[
∑
k
=
−
∞
∞
a
k
δ
(
t
−
k
T
s
)
]
∗
g
T
(
t
)
∗
c
(
t
)
+
n
(
t
)
}
∗
g
R
(
t
)
y(t)=\Bigg\{\Bigg[\sum_{k=-\infty}^\infty a_k\delta(t-kT_s)\Bigg]\ast g_T(t)\ast c(t)+n(t)\Bigg\}\ast g_R(t)
y(t)={[k=−∞∑∞akδ(t−kTs)]∗gT(t)∗c(t)+n(t)}∗gR(t)
令
y
n
(
t
)
=
n
(
t
)
∗
g
R
(
t
)
y_n(t)=n(t)\ast g_R(t)
yn(t)=n(t)∗gR(t),并令数字基带传输系统总的冲激响应为
h
(
t
)
=
g
T
(
t
)
∗
c
(
t
)
∗
g
R
(
t
)
h(t)=g_T(t)\ast c(t)\ast g_R(t)
h(t)=gT(t)∗c(t)∗gR(t)
相应地,总的频响函数为
H
(
f
)
=
G
T
(
f
)
C
(
f
)
G
R
(
f
)
H(f)=G_T(f)C(f)G_R(f)
H(f)=GT(f)C(f)GR(f)
于是
y
(
t
)
=
∑
k
=
−
∞
∞
a
k
δ
(
t
−
k
T
s
)
∗
h
(
t
)
+
y
n
(
t
)
=
∑
k
=
−
∞
∞
a
k
h
(
t
−
k
T
s
)
+
y
n
(
t
)
y(t)=\sum_{k=-\infty}^\infty a_k\delta(t-kT_s)\ast h(t)+y_n(t)=\sum_{k=-\infty}^\infty a_kh(t-kT_s)+y_n(t)
y(t)=k=−∞∑∞akδ(t−kTs)∗h(t)+yn(t)=k=−∞∑∞akh(t−kTs)+yn(t)
记抽样定时为
t
=
n
T
s
+
t
0
t=nT_s+t_0
t=nTs+t0,得到抽样值
r
n
=
y
(
n
T
s
+
t
0
)
r_n=y(nT_s+t_0)
rn=y(nTs+t0)。其中,
t
0
t_0
t0是相对每个时隙开始处的某个固定的时延,为了叙述简明,下面的讨论中不妨将其省略。于是
r
n
=
y
(
n
T
s
)
=
∑
k
=
−
∞
∞
a
k
h
(
n
T
s
−
k
T
s
)
+
y
n
(
n
T
s
)
r_n=y(nT_s)=\sum_{k=-\infty}^\infty a_kh(nT_s-kT_s)+y_n(nT_s)
rn=y(nTs)=k=−∞∑∞akh(nTs−kTs)+yn(nTs)
=
a
n
h
(
0
)
+
∑
m
=
−
∞
m
≠
0
∞
a
n
−
m
h
(
m
T
s
)
+
y
n
(
n
T
s
)
\ \ \ \ \ \ \ \ =a_nh(0)+\sum_{m=-\infty\ m\neq 0}^\infty a_{n-m}h(mT_s)+y_n(nT_s)
=anh(0)+m=−∞ m̸=0∑∞an−mh(mTs)+yn(nTs)
式中,令
m
=
n
−
k
m=n-k
m=n−k。式中的第一项对应所期望接收到的
a
n
a_n
an符号(不妨认为
h
(
t
)
h(t)
h(t)是归一化的,即
h
(
0
)
=
1
h(0)=1
h(0)=1);第二项由
a
n
a_n
an符号以外的其他符号构成,是其他符号对当前符号
a
n
a_n
an的干扰,称为码间串扰或码间干扰(inter-symbol interference,ISI);第三项为噪声的影响。
码间干扰反映的是基带系统传递函数的不良,其中包括信道的部分,也包括接收与发送滤波器等部分。其中的ISI对应项有:
∑
m
=
−
∞
m
≠
0
∞
a
n
−
m
h
(
m
T
s
)
=
⋯
+
a
n
−
2
h
(
2
T
s
)
+
a
n
−
1
h
(
T
s
)
+
a
n
+
1
h
(
−
T
s
)
+
a
n
+
2
h
(
−
2
T
s
)
+
⋯
\sum_{m=-\infty\ m\neq 0}^\infty a_{n-m}h(mT_s)=\cdots+a_{n-2}h(2T_s)+a_{n-1}h(T_s)+a_{n+1}h(-T_s)+a_{n+2}h(-2T_s)+\cdots
m=−∞ m̸=0∑∞an−mh(mTs)=⋯+an−2h(2Ts)+an−1h(Ts)+an+1h(−Ts)+an+2h(−2Ts)+⋯
可见,由于
m
≠
0
m\neq0
m̸=0时的
h
(
m
T
s
)
≠
0
h(mT_s)\neq0
h(mTs)̸=0,前后的码元对第
n
n
n个码元的接收造成干扰。或者从传输各个码元时引起的脉冲
a
n
h
(
t
−
n
T
s
)
a_nh(t-nT_s)
anh(t−nTs)的角度观察,如图3所示,由于传输后的脉冲存在前导与拖尾,它在完成传递
a
n
a_n
an的同时也不同程度地干扰了前后码元的接收,图3清楚地反映出ISI的物理意义是“码元彼此间的串扰”。(关于前导干扰这一点,我考虑真实情况下的系统是因果系统,不存在前导干扰,这里书本上应该只是在理论分析)

因为前后码元是随机的,所产生的码间串扰也是随机的,如果它足够大就可能直接引起误码,及时它本身不太大,也会增加噪声产生误码的机会。而且,码间串扰的影响无法通过增加信号功率等方法来减弱。
那么码间串扰如何解决。参见下一篇文章:基带传输系统的奈奎斯特准则与奈奎斯特速率。

















 2328
2328

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









