






ABS 防抱死制动系统———模糊Pid
Carsim与matlab/simulink联合仿真,相较于单独使用simulink仿真更加可靠
(Carsim2019,Matlab2018a)
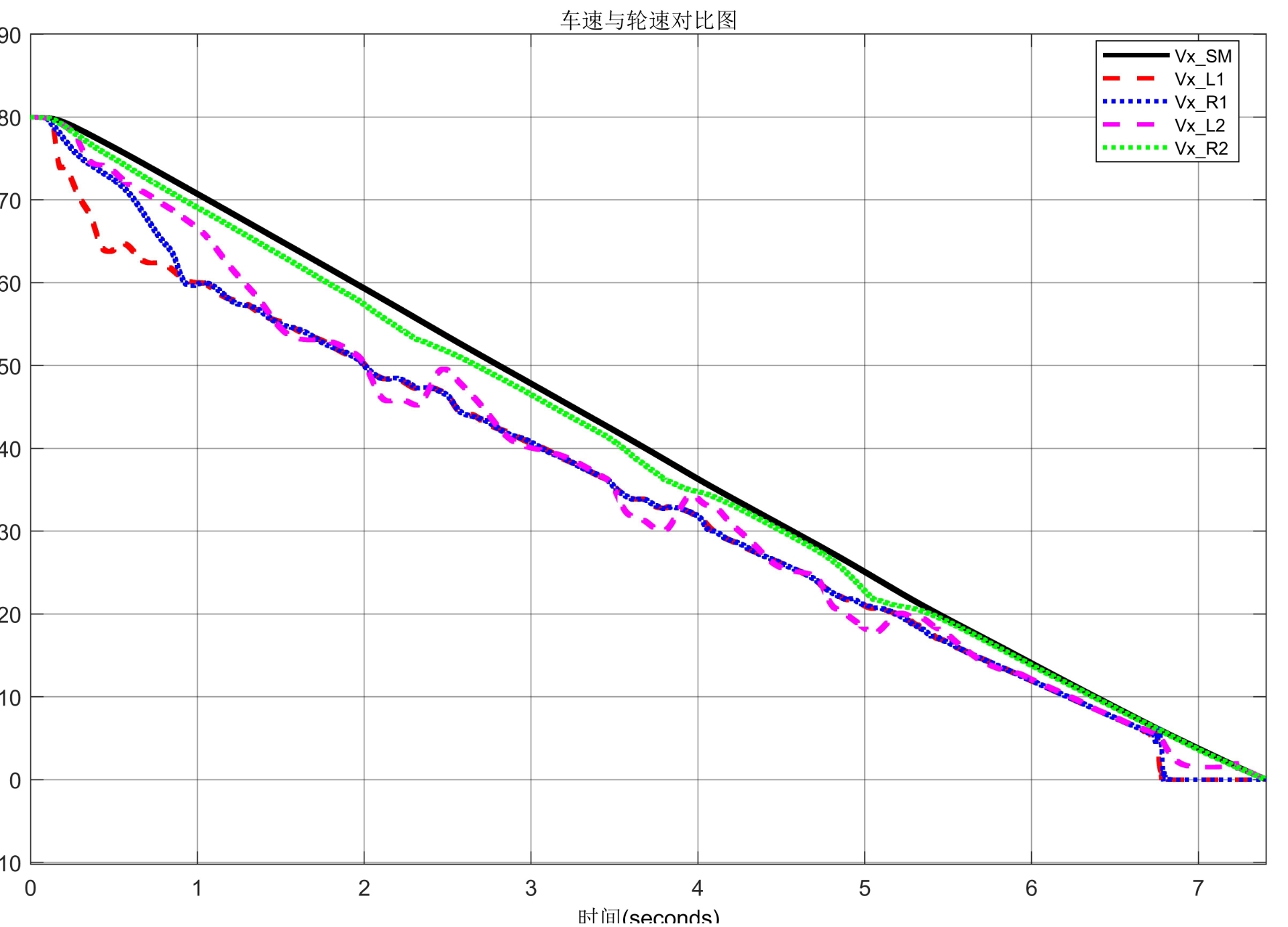
控制目标为控制车轮的滑移率在最优滑移率附近,使制动时车轮不抱死并且获得较好的制动性能。
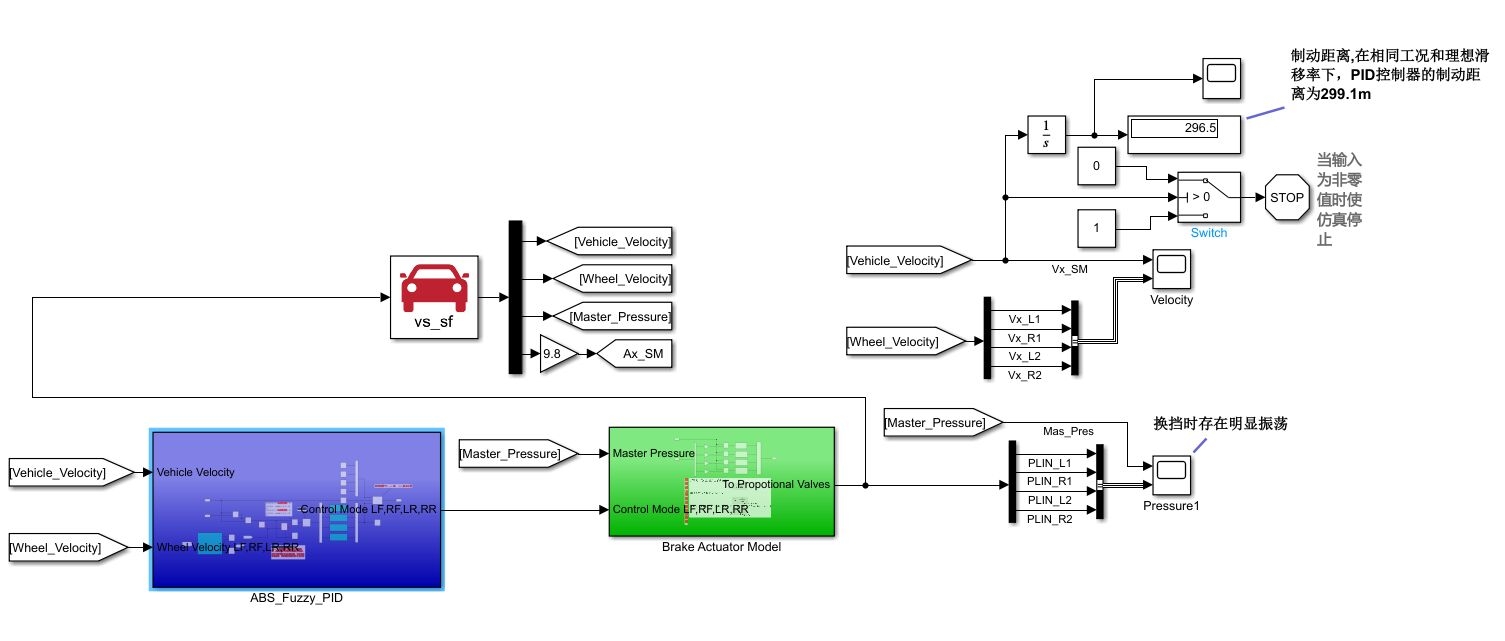
控制方式为模糊PID控制器(附带模糊控制器设置代码,帮你入门模糊控制),输入为实际滑移率与最优滑移率的偏差,输出为制动压力调节信号。
相比于PID控制器、逻辑门限值制动效果较好,轮速没有那么多抖动,较为稳定(视频中黑车为Pid控制器,蓝绿色的车是逻辑门限值的,其中黑车的制动距离明显较短)。
说明文档和模型注释说明。
同时欢迎一起交流ABS相关问题。
ID:17120677508172986
二斤青柿子
ABS防抱死制动系统是一种重要的汽车安全技术,它的作用是在制动过程中,通过调节车轮的制动力分配,防止车轮因过度制动而抱死,从而保持车辆的稳定性和操控性。在实际应用中,如何优化ABS控制算法,以实现卓越的制动性能一直是研究者们的关注点。
本文结合Carsim和Matlab Simulink两个仿真软件,提出了一种基于模糊PID控制器的ABS控制方案,并与传统的PID控制器和逻辑门限值制动进行了对比分析。通过该方案,可以有效地控制车轮的滑移率,以达到最优滑移率附近的制动效果,并获得较好的制动性能。
在该方案中,控制目标是通过控制车轮滑移率来防止车轮抱死,并同时获得较好的制动性能。为了实现这一目标,采用了模糊PID控制器作为控制器。模糊PID控制器是PID控制器与模糊控制器相结合的一种控制方法,具有较好的性能和鲁棒性。
具体的控制过程如下:首先,通过传感器获取实际滑移率和最优滑移率的偏差作为输入。然后,模糊PID控制器根据这个偏差计算制动压力的调节信号作为输出。通过不断迭代调整制动压力,使得实际滑移率逐渐接近最优滑移率,从而实现车轮的稳定制动。
与传统的PID控制器和逻辑门限值制动相比,模糊PID控制器的制动效果更好,轮速波动更小,制动距离更短。这一点通过实验视频可以直观地看出,在视频中,黑车为PID控制器,蓝绿色的车为逻辑门限值控制器,可以明显看到黑车的制动距离明显较短。
为了方便读者理解和复现该方案,本文还提供了相应的说明文档和模型注释。说明文档详细介绍了ABS防抱死制动系统的背景、原理和实现过程,以及模型注释中对模型进行了细致的解释和说明,帮助读者更好地理解和应用该方案。
最后,欢迎读者和作者一起交流ABS相关问题。本文只是对ABS防抱死制动系统的模糊PID控制方案进行了一次简要的介绍,还有很多细节和问题可以进一步深入研究和探讨。通过交流与探讨,我们可以共同推动ABS技术的发展和应用,为汽车行业的安全性和稳定性做出更大的贡献。
相关的代码,程序地址如下:http://matup.cn/677508172986.html
















 565
565











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









