






集中式观测融合EKF(CMF-EKF)的思想是,由N个传感器对目标进行多方位观测,这些观测数据传入融合中心进行增广,最终得到融合估计。由于集中式观测融合是把所有传感器数据进行增广,因此融合结果具有全局最优性。
本文采用以下状态模型进行仿真:
其中
,
,
,
。
为
时刻在
轴上的位置,
为
时刻在
轴上的位置,
为
时刻的速度,
为
时刻的切线与
轴夹角的角度,
为
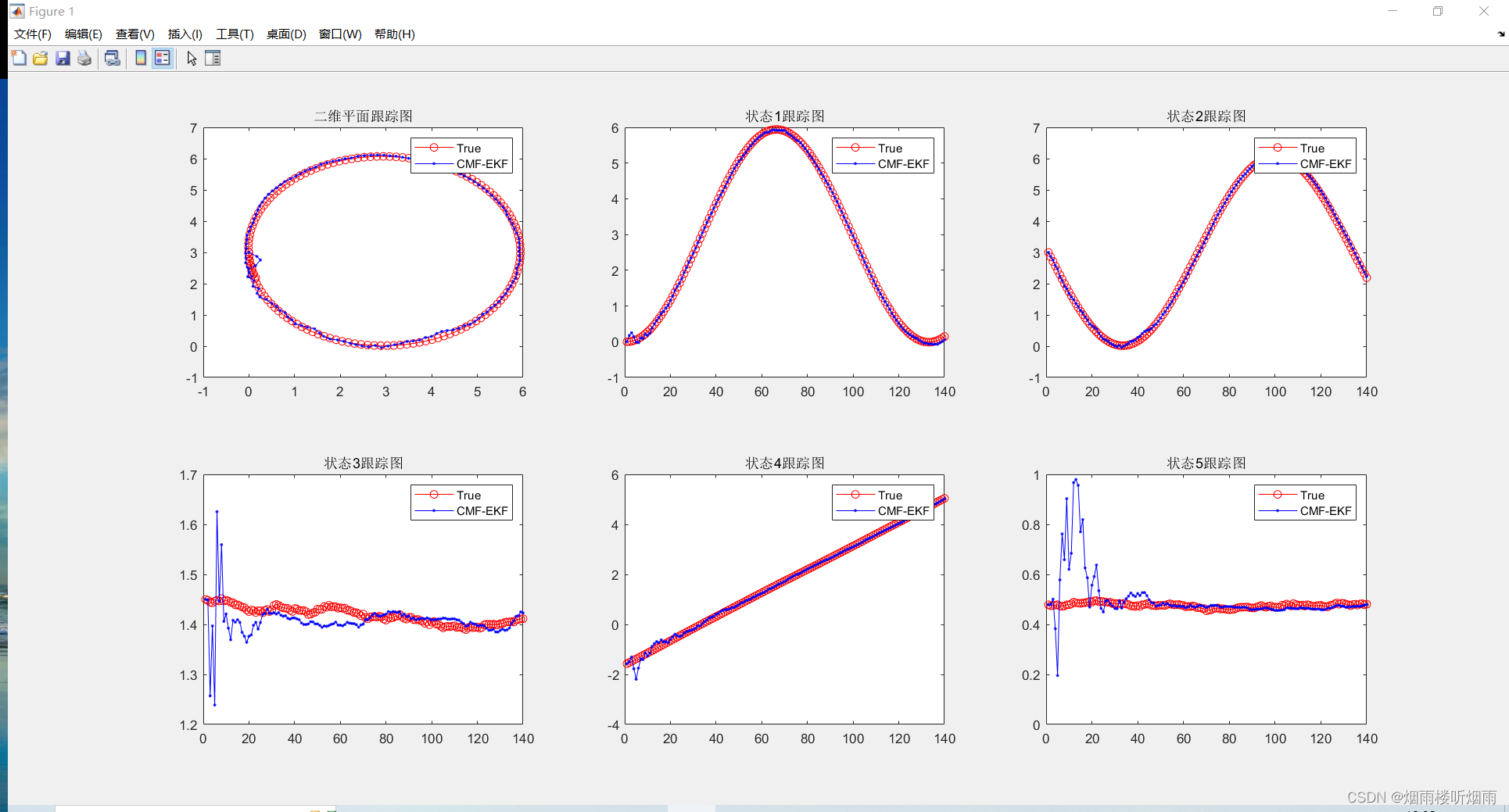
时刻角速度。matlab程序和仿真图如下:
clc;clear;close all;
bushu=140;
T=0.1;
X=zeros(5,bushu);
X(:,1)=[0;3;1.45;-pi/2;0.4787];%x位置,y位置,速度,角度,角速度
Q=1e-3*diag([1,1]);
W=sqrtm(Q)*randn(2,bushu);
%% 模拟轨迹
for i=2:bushu
x=X(1,i-1);
y=X(2,i-1);
v=X(3,i-1);
zeita=X(4,i-1);
w=X(5,i-1);
f(:,i)=[x+(v/w)*(sin(zeita+w*T)-sin(zeita));
y+(v/w)*(-cos(zeita+w*T)+cos(zeita));
v;
zeita+w*T;
w];
gama=[0.5*(cos(zeita))*T^2,0;
0.5*(sin(zeita))*T^2,0;
T,0;
0,0.5*T^2;
0,T];
X(:,i)=f(:,i)+gama*W(:,i);
end
%% UWB位置
x1=0;y1=0;
x2=10;y2=0;
x3=0;y3=10;
%% 距离
delat_w2=1e-1;
R=delat_w2*diag([0.1,0.2,0.1]);
v=sqrtm(R)*randn(3,bushu);
for i=1:bushu
Z(1,i)=sqrt((X(1,i)-x1)^2+(X(2,i)-y1)^2)+v(1,i);
Z(2,i)=sqrt((X(1,i)-x2)^2+(X(2,i)-y2)^2)+v(2,i);
Z(3,i)=sqrt((X(1,i)-x3)^2+(X(2,i)-y3)^2)+v(3,i);
end
%% 滤波
Xekf=zeros(5,bushu);
Xekf(:,1)=[0;3;1.45;-pi/2;0.4787];
Xjian=zeros(5,bushu);
P=eye(5);
for i=2:bushu
x=Xekf(1,i-1);
y=Xekf(2,i-1);
v=Xekf(3,i-1);
zeita=Xekf(4,i-1);
w=Xekf(5,i-1);
f1=[x+(v/w)*(sin(zeita+w*T)-sin(zeita));
y+(v/w)*(-cos(zeita+w*T)+cos(zeita));
v;
zeita+w*T;
w];
fai=[ 1, 0, (sin(zeita + T*w) - sin(zeita))/w, (v*(cos(zeita + T*w) - cos(zeita)))/w, (T*v*cos(zeita + T*w))/w - (v*(sin(zeita + T*w) - sin(zeita)))/w^2;
0, 1, -(cos(zeita + T*w) - cos(zeita))/w, (v*(sin(zeita + T*w) - sin(zeita)))/w, (v*(cos(zeita + T*w) - cos(zeita)))/w^2 + (T*v*sin(zeita + T*w))/w;
0, 0, 1, 0, 0;
0, 0, 0, 1, T;
0, 0, 0, 0, 1];
gama1=[0.5*(cos(zeita))*T^2,0;
0.5*(sin(zeita))*T^2,0;
T,0;
0,0.5*T^2;
0,T];
Xjian(:,i)=f1;
P0=fai*P*fai'+gama1*Q*gama1';
z1=sqrt((Xjian(1,i)-x1)^2+(Xjian(2,i)-y1)^2);
z2=sqrt((Xjian(1,i)-x2)^2+(Xjian(2,i)-y2)^2);
z3=sqrt((Xjian(1,i)-x3)^2+(Xjian(2,i)-y3)^2);
z(:,i)=[z1;z2;z3];
x=Xjian(1,i);
y=Xjian(2,i);
H=[ x/(x^2 + y^2)^(1/2), y/(x^2 + y^2)^(1/2), 0, 0, 0;
(2*x - 6)/(2*((x - 3)^2 + y^2)^(1/2)), y/((x - 3)^2 + y^2)^(1/2), 0, 0, 0;
x/((y - 3)^2 + x^2)^(1/2), (2*y - 6)/(2*((y - 3)^2 + x^2)^(1/2)), 0, 0, 0];
K=P0*H'*pinv(H*P0*H'+R);
Xekf(:,i)=Xjian(:,i)+K*(Z(:,i)-z(:,i));
P=(eye(5)-K*H)*P0;
end
figure(1)
t=1:bushu;
subplot(2,3,1);plot(X(1,:),X(2,:),'-ro',Xekf(1,:),Xekf(2,:),'-b.');legend('True','CMF-EKF');title('二维平面跟踪图');
subplot(2,3,2);plot(t,X(1,:),'-ro',t,Xekf(1,:),'-b.');legend('True','CMF-EKF');title('状态1跟踪图');
subplot(2,3,3);plot(t,X(2,:),'-ro',t,Xekf(2,:),'-b.');legend('True','CMF-EKF');title('状态2跟踪图');
subplot(2,3,4);plot(t,X(3,:),'-ro',t,Xekf(3,:),'-b.');legend('True','CMF-EKF');title('状态3跟踪图');
subplot(2,3,5);plot(t,X(4,:),'-ro',t,Xekf(4,:),'-b.');legend('True','CMF-EKF');title('状态4跟踪图');
subplot(2,3,6);plot(t,X(5,:),'-ro',t,Xekf(5,:),'-b.');legend('True','CMF-EKF');title('状态5跟踪图');















 2017
2017











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









