






MPU9250 九轴 EKF扩展卡尔曼滤波数据融合算法
短时间内我们相信陀螺仪,长时间内我们可以相信加速度计。
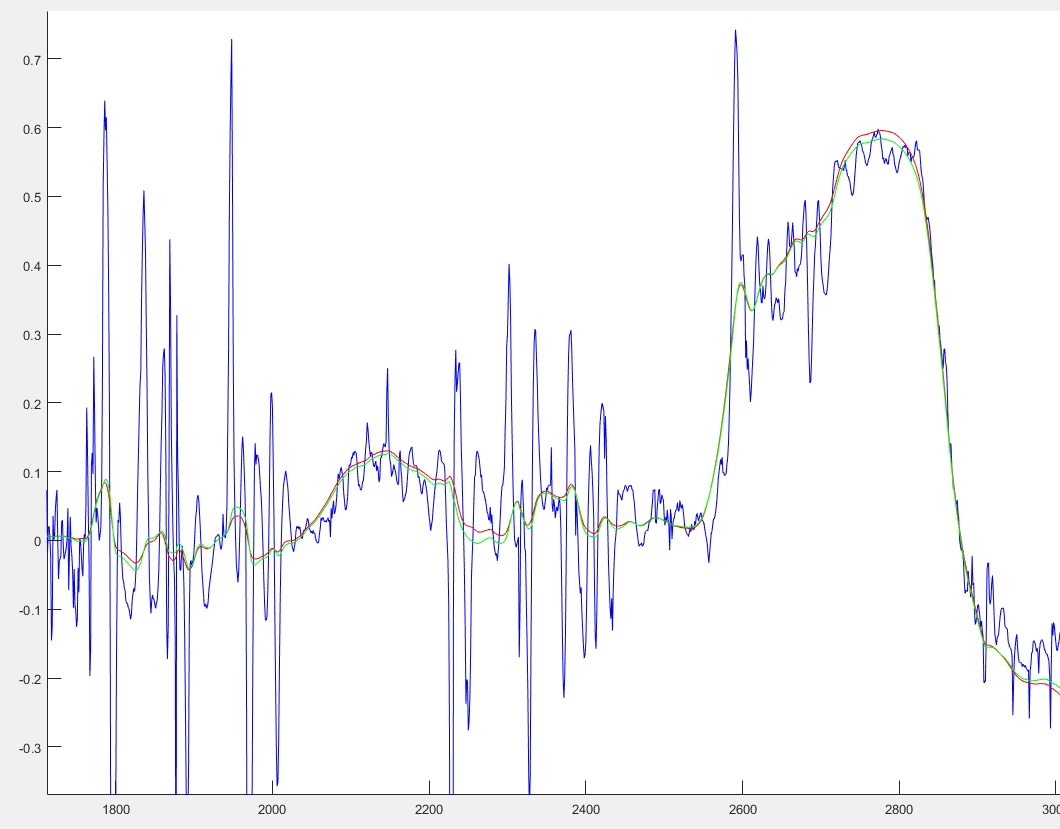
使用扩展卡尔曼滤波(EKF)将数据融合。
选取状态量为四元数和三轴陀螺仪的漂移 控制量为陀螺仪采样值 观测量为 三轴加速度计和磁偏角
YID:14200673825536274
卡尔曼智慧科技

MPU9250 九轴 EKF扩展卡尔曼滤波数据融合算法
摘要:
本文围绕MPU9250九轴传感器的数据融合算法展开讨论。我们从陀螺仪和加速度计的特性出发,介绍了在短时间内对陀螺仪数据的可信性以及在长时间内对加速度计数据的可信性。为了实现更准确的姿态解算,我们引入了扩展卡尔曼滤波(EKF)算法来进行数据融合。我们选取了四元数作为状态量,以及陀螺仪的漂移作为控制量,同时使用三轴加速度计和磁偏角作为观测量。本文将详细阐述EKF算法的原理和实现步骤,并提供一些实际应用中的注意事项。
关键词:MPU9250、九轴传感器、数据融合、扩展卡尔曼滤波、姿态解算
引言:
随着物联网和智能设备的快速发展,姿态解算技术在航空、航天、无人机、虚拟现实等领域中扮演着重要的角色。九轴传感器是一种集成了陀螺仪、加速度计和磁力计的传感器,能够提供更准确的姿态信息。然而,陀螺仪和加速度计各自存在一些局限性,例如陀螺仪在短时间内存在噪声和漂移,而加速度计在长时间内受到重力加速度的影响。为了克服这些问题,我们需要一种数据融合算法来综合利用九轴传感器的各个部分,从而得到更精确的姿态解算结果。
-
MPU9250传感器介绍
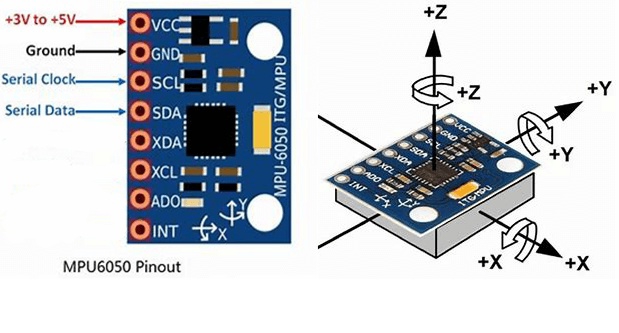
MPU9250是一款常用的九轴传感器,集成了三轴陀螺仪、三轴加速度计和三轴磁力计。陀螺仪测量角速度,加速度计测量线性加速度,磁力计测量磁场强度。这些传感器通过SPI或I2C接口与主控芯片进行通信,输出原始的传感器数据。 -
陀螺仪和加速度计的特性
陀螺仪能够提供角速度的测量值,但存在噪声和漂移的问题。在短时间内,我们可以相信陀螺仪的测量值,但随着时间的推移,陀螺仪的漂移会越来越大,导致姿态解算的不准确。相比之下,加速度计可以提供更稳定的测量值,但长时间以来的重力加速度会对其测量结果产生影响。 -
扩展卡尔曼滤波算法
为了解决陀螺仪和加速度计各自存在的问题,我们引入了扩展卡尔曼滤波(EKF)算法来进行数据融合。EKF是一种基于卡尔曼滤波的扩展方法,能够在非线性系统中进行估计和预测。我们选取了四元数作为状态量,因为它能够有效地表示姿态信息,并且不会受到旋转矩阵的奇异性问题。同时,我们将陀螺仪的漂移作为控制量,在姿态解算的过程中进行补偿。观测量方面,我们使用三轴加速度计和磁偏角来对姿态进行观测。 -
EKF算法的实现步骤
EKF算法的实现主要分为预测步骤和更新步骤。在预测步骤中,我们使用陀螺仪的测量值进行状态预测,并更新状态的协方差矩阵。在更新步骤中,我们使用加速度计和磁偏角的测量值来校正预测的状态,并更新状态的协方差矩阵。通过交替进行预测和更新,我们可以逐步精确地估计出姿态信息。 -
实际应用中的注意事项
在实际应用中,我们需要考虑一些问题,例如传感器的校准、姿态误差的补偿、姿态解算的更新频率等。传感器的校准是确保测量结果准确的关键步骤,可以采用标定或者自适应校准的方法进行。同时,我们可以使用传感器融合算法对姿态误差进行补偿,提高解算的准确性。此外,姿态解算的更新频率也需要根据应用需求进行调整,以平衡解算精度和计算资源消耗。
结论:
本文围绕MPU9250九轴传感器的数据融合算法展开讨论,介绍了使用扩展卡尔曼滤波算法对陀螺仪和加速度计数据进行融合的方法。我们选取了四元数作为状态量,并使用陀螺仪的漂移进行补偿,同时使用加速度计和磁偏角进行观测。通过预测和更新步骤,我们可以得到更准确的姿态解算结果。
以上相关代码,程序地址:http://wekup.cn/673825536274.html















 1159
1159

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









