






公众号“轻松玩转机器人”,欢迎关注。
1、简介
Diamond机构类似于Delta机构,区别在于Diamond机构是两臂并联机构,如下图所示。特别地,当r1=r2=0时,A点与B点重合,E点与F点重合,机构简化为五杆机构。
对于关节角度正负问题的解释:θ1、θ2在X轴下方为负,在X轴上方为正。

2、正运动学
已知关节角度θ1和θ2,求末端中心点坐标。
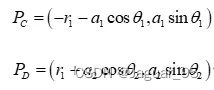
(1) 求C点和D点坐标
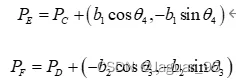
(2) 求E点和F点的坐标
(3) θ3和θ4未知,利用E点和F点的x y坐标关系建立方程

上述方程组展开后,将关于θ3的项都移到等式左边,其他项移到等式右边,如下所示:

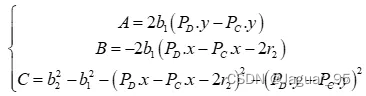
上式两边进行平方,并相加,则能消去关于θ3的项,并得到:
![]()
其中,
由三角公式可得:

进而可以求得E点坐标,而动平台中心点坐标:
![]()
3、逆运动学
已知末端中心点坐标,求关节角度θ1和θ2。
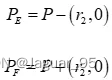
(1) 先求E点和F点坐标
(2) 求向量AE和BF

(3) 计算向量AE与X轴正方向夹角、向量BF与X轴负方向夹角
(4) 利用余弦定理求∠CAE和∠DBF

(5) 求关节角度θ1和θ2
4、仿真实验
设机械参数:
![]()
![]()

设计一条轨迹,反算关节角度,再正解验证:
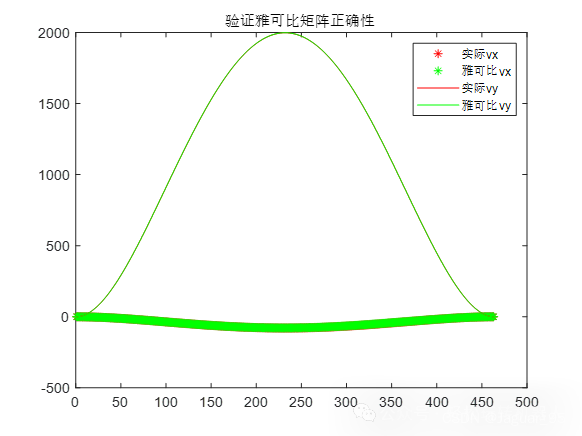
验证雅可比矩阵的正确性:















 201
201

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









