







1 背景
在之前的博客《自动驾驶---Motion Planning之构建SLT Driving Corridor》中,为读者讲解了SLT图构建的思路---通过构建Driving Corridor的方式确定SL两个方向的boundary。但是并没有去详细讲解如何去构造优化问题,以及如何去生成最终的轨迹,所以本篇博客将继续为读者讲解STSC后半部分的内容。
2 STSC轨迹规划
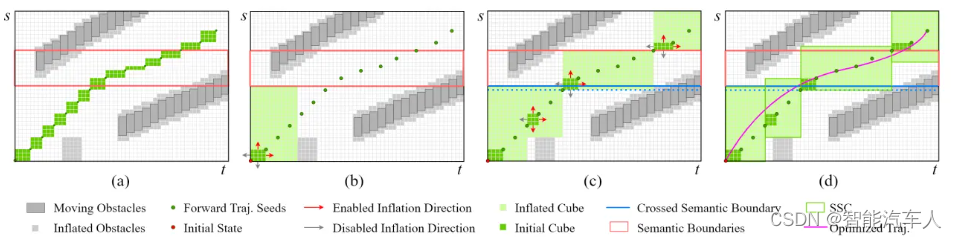
在博客 《自动驾驶---Motion Planning之构建SLT Driving Corridor》中,详细说明了Corridor的生成过程,如下图(详细内容可参考之前的博客):
2.1 基于贝塞尔曲线的轨迹规划
首先介绍Bezier曲线,Bezier曲线在路径规划中也经常用到,因此在这里简要阐述一下。贝塞尔曲线分为几种,一般2阶、3阶、4阶,或者更高阶的比较少见到,基于

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 3412
3412











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











