







一、机械臂部分:
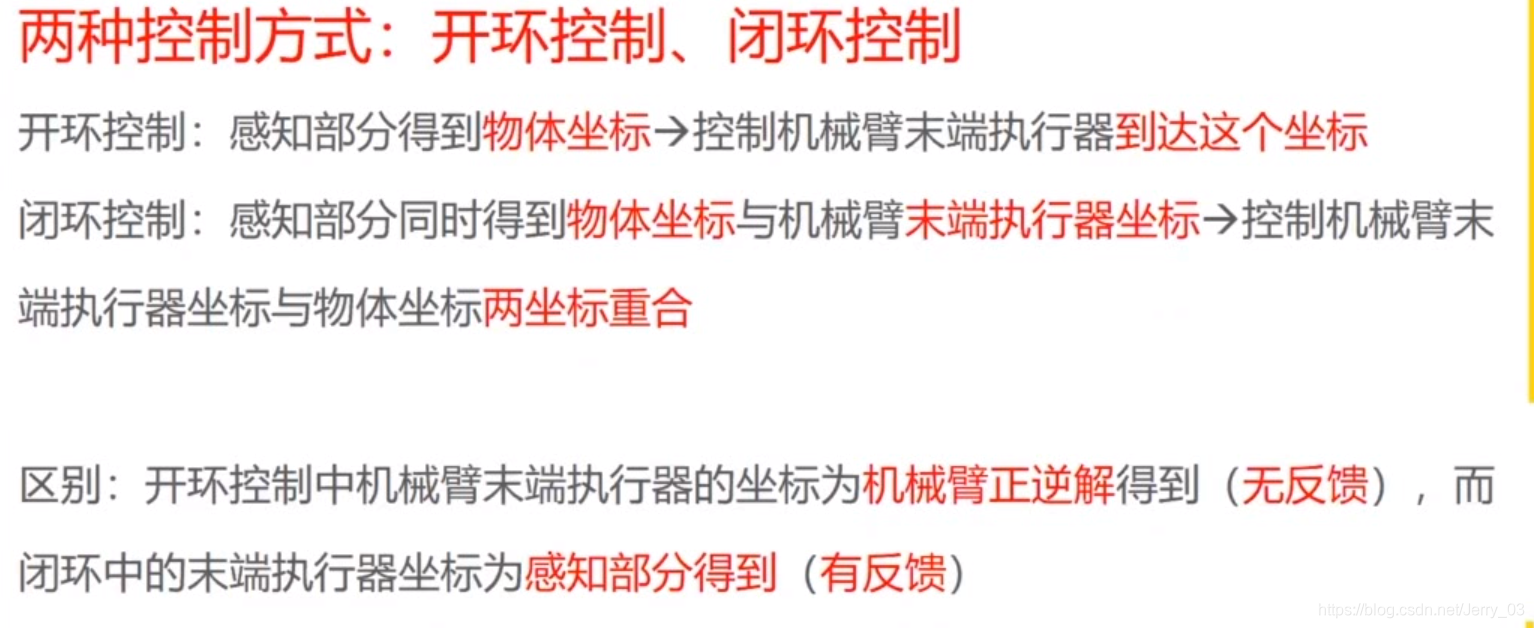
1.机械臂的两种控制方式如下图,其中的机械臂末端执行器可理解为机械臂抓取时的 “爪子”,感知部分可以是传感器,也可以是机器视觉等。
机械臂末端执行器:五花八门,如下图。

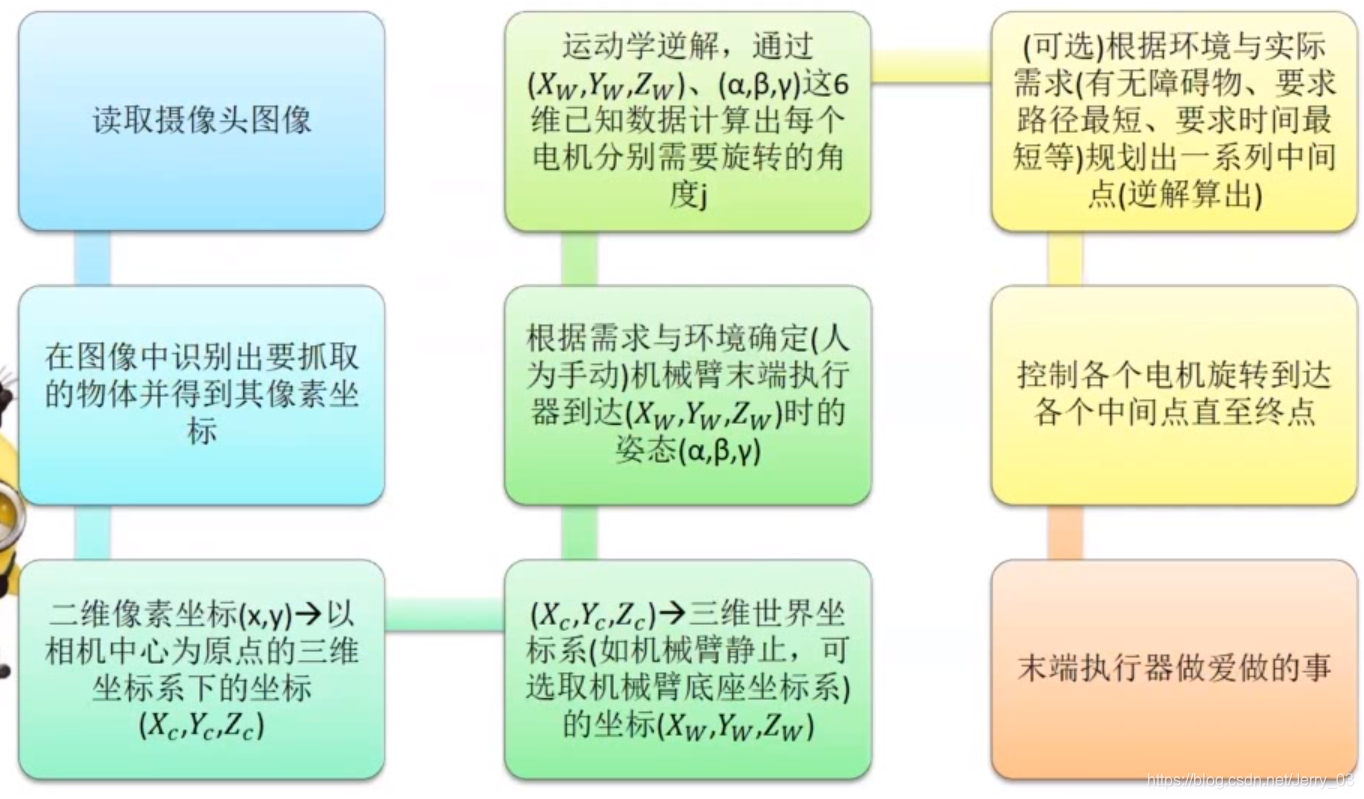
2.机械臂的抓取流程,其中姿态坐标为机械臂末端执行器的状态,可以是横着、竖着或者侧着等,例如抓取一个水杯,则姿态应该为侧着抓取。可以运动学逆解算出电机旋转的角度,或者一些其他需求。具体流程见下图
3.自由度概念,简单来说就是看有几个电机控制(末端执行器上的不算)

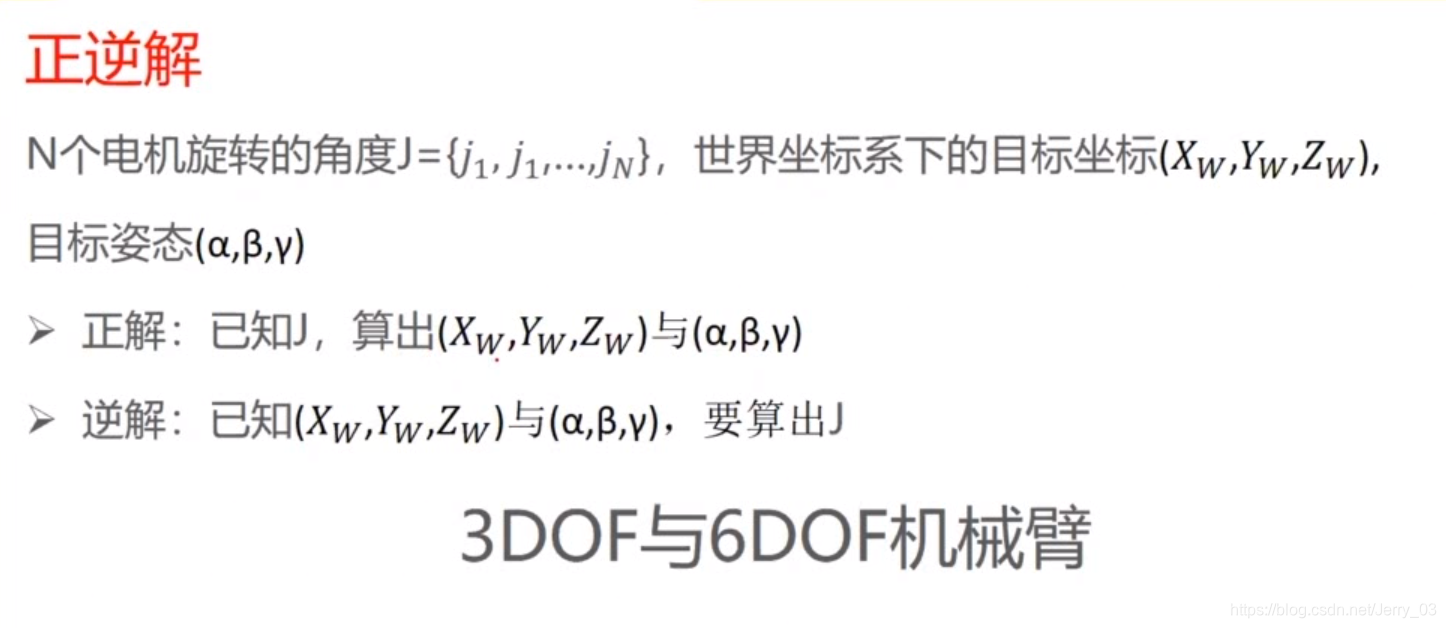
4.正逆解如下图,其中N表示自由度。
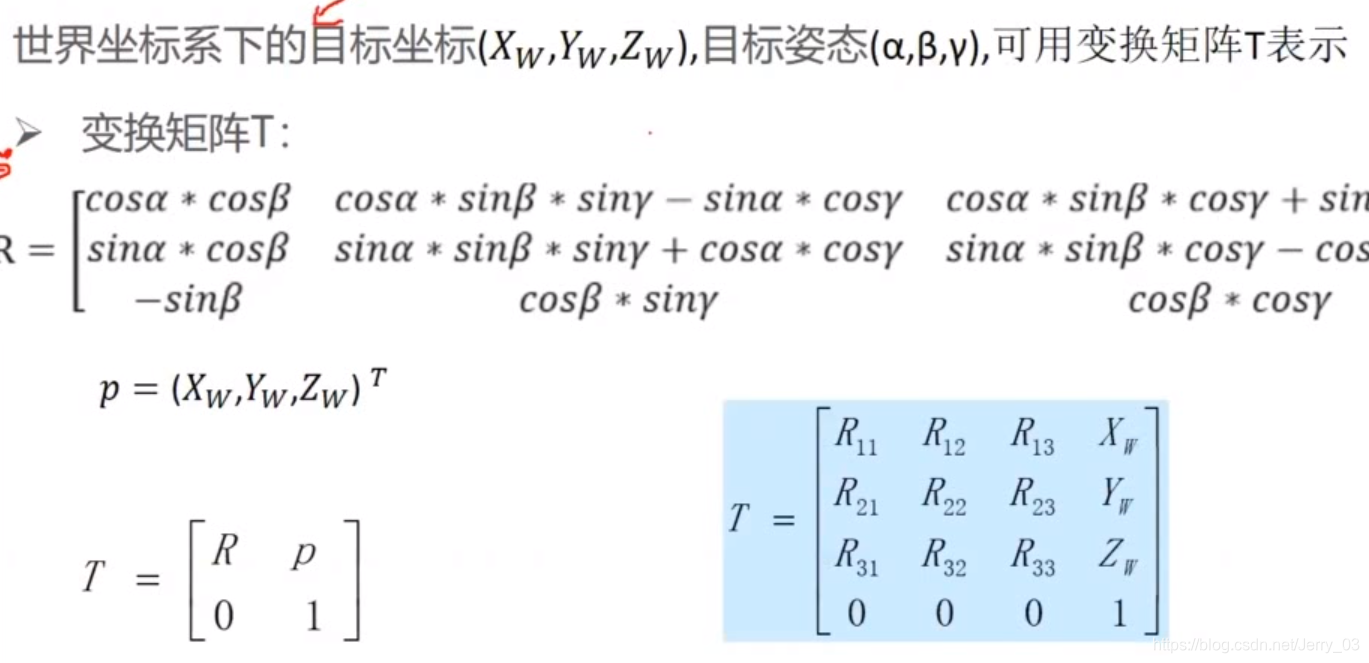
5.获取世界坐标体系下的三维坐标,要利用T变换,将相机三维坐标转换到世界三维坐标下

二、感知部分
1.感知部分的相机简介如下,普通的USB相机适用于一些固定工作台等场景,只能获取二维坐标,而深度相机可以获得三位坐标
2.在图像中找到物体的坐标的方法,其中建立三维模型(ORK算法)来识别物体为一种高效的方法。其他的像深度学习、形状颜色、深度信息等为一些常见的方法


















02-28
 1127
1127
1127
07-29
2935
2935
08-15
1万+
1万+
10-01
3472
3472
01-14
4863
4863

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









