






本科毕设需要在FPGA/ZYNQ平台实现一个双目深度估计系统,其中大部分图像处理模块都是使用HLS工具实现的。双目深度估计需要对左右图像进行立体校正,实现极线约束。在Xilinx官方的HLS视频库中有直接能用的处理函数,这里稍微记录一下实现过程。
Matlab双目标定
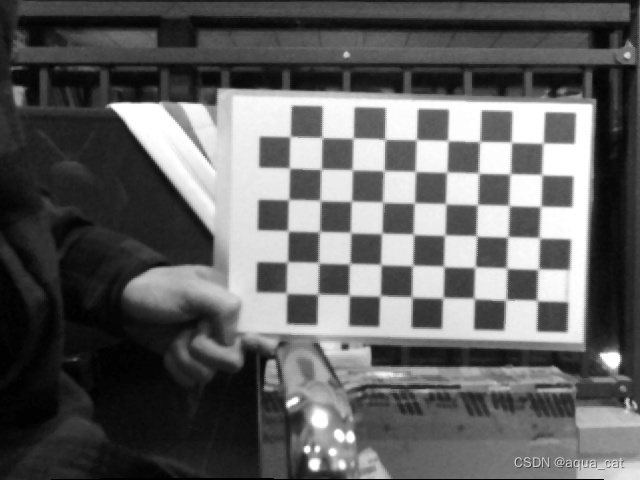
获取棋盘格图像对
保存好双目相机的左右图像对,左右图像命名标号然后分开放在两个文件夹下。
Matlab双目标定工具箱

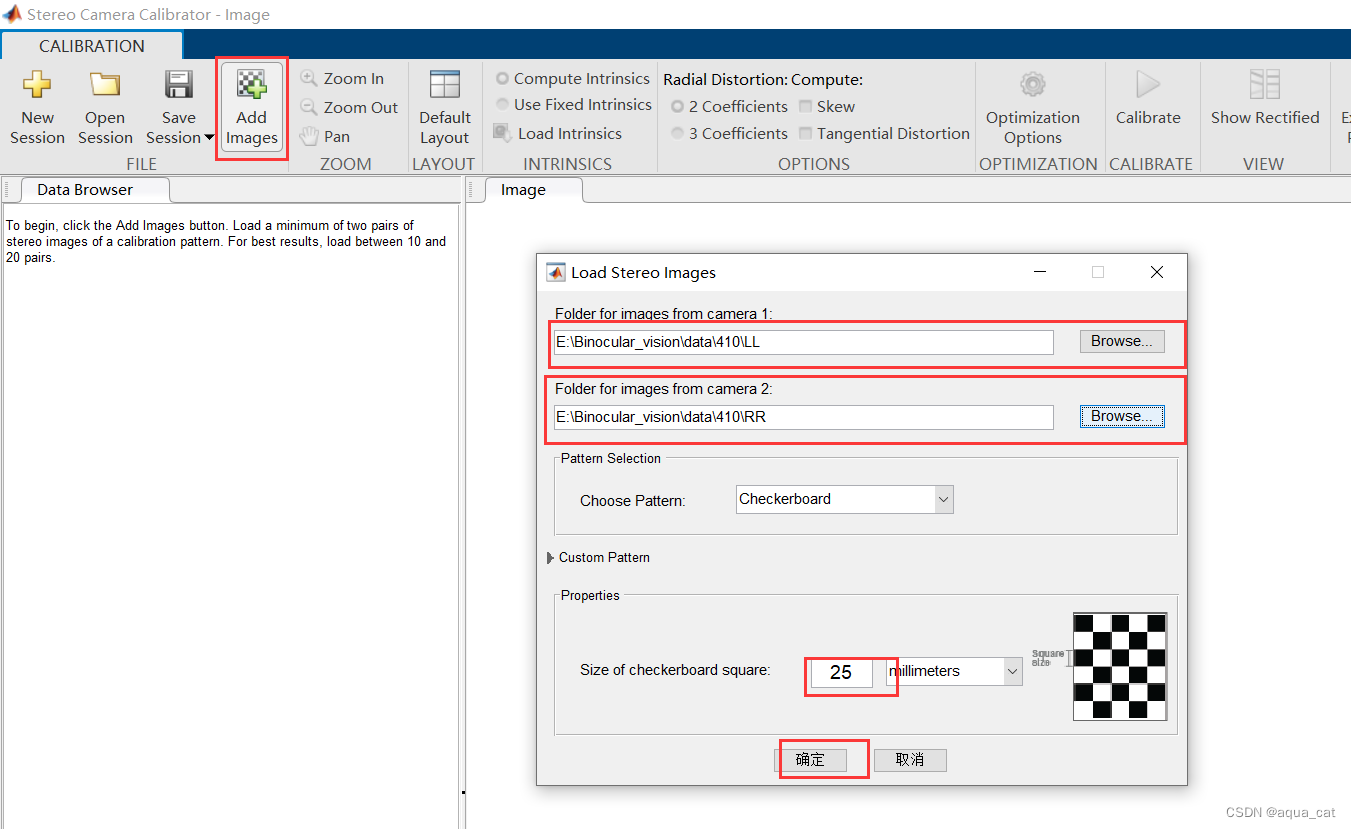
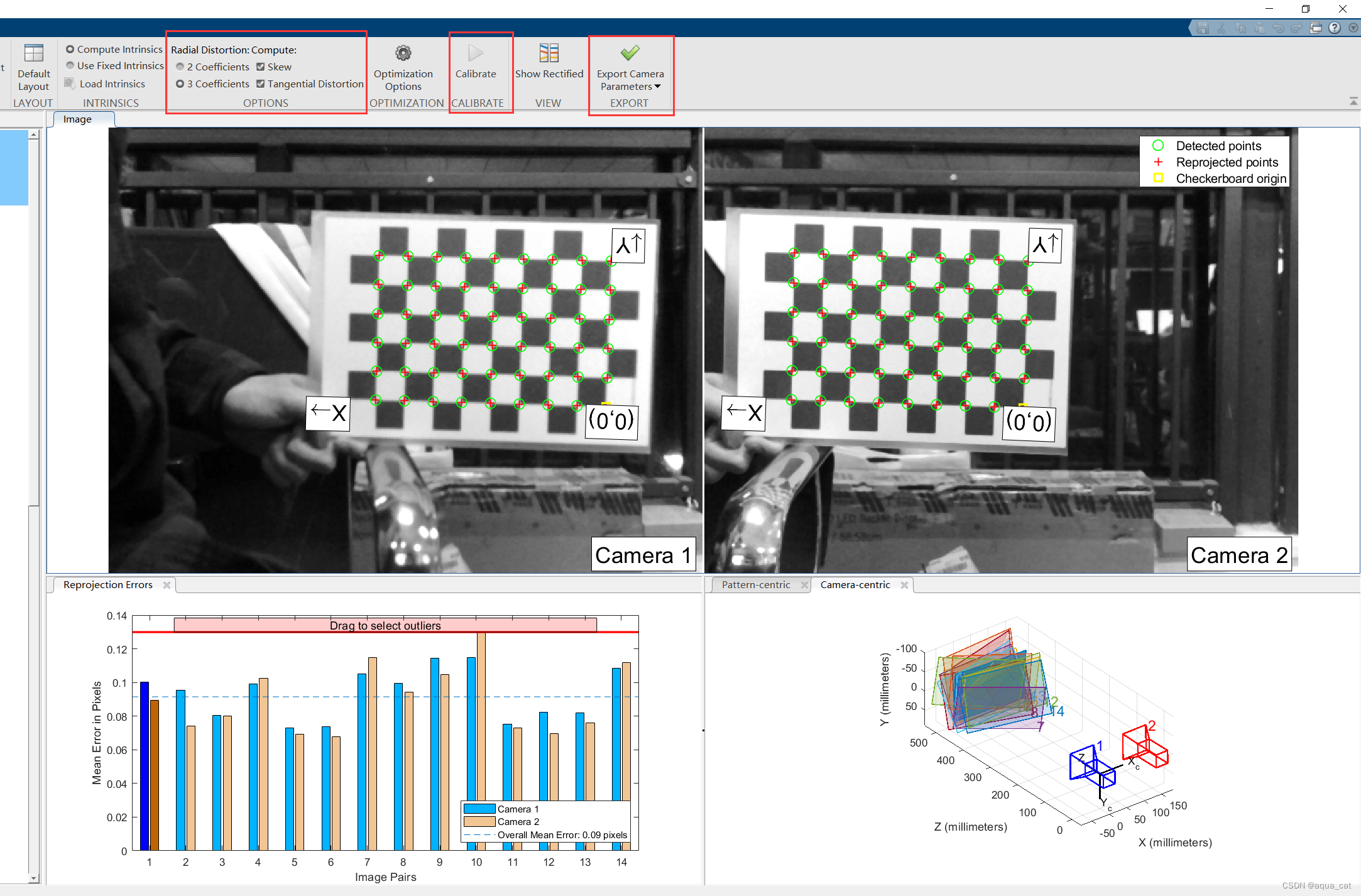
这个工具箱基本属于傻瓜式操作,简单几步相机的各种参数矩阵就算出来了。
具体操作流程可以参考:matlab双目标定(详细过程)
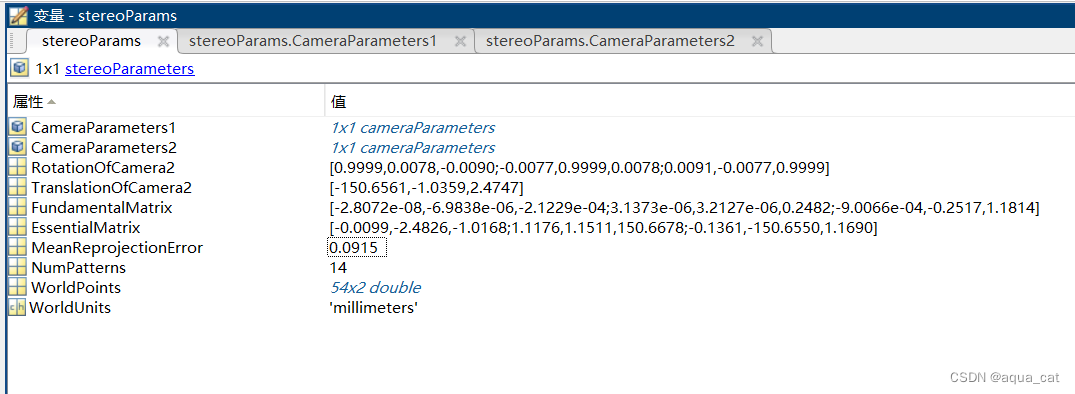
参数保存
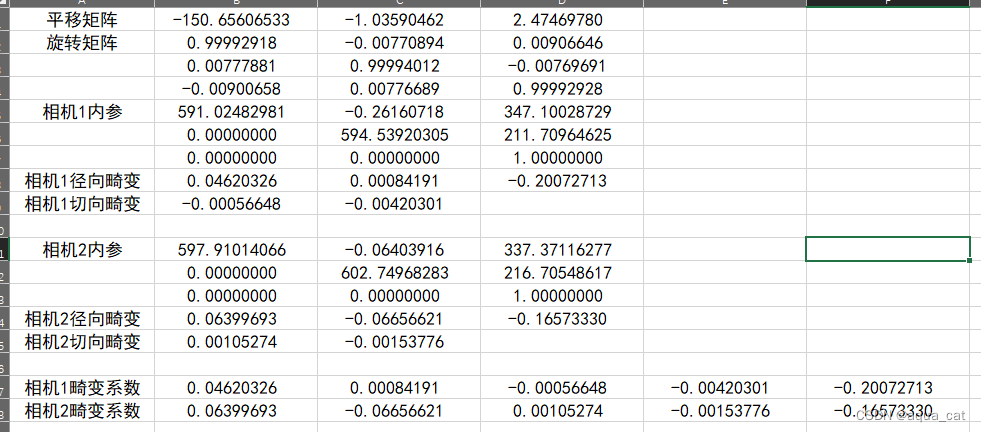
整理需要使用的参数并保存好,记得旋转矩阵和相机内参矩阵需要转置。
HLS立体校正
stereoRectify
stereoRectify是Opencv里的函数,用于计算变换矩阵和投影矩阵,具体参数说明参考:OpenCV如何正确使用stereoRectify函数
int main(void)
{
cv::Mat cameraMatrix1 = (cv::Mat_<double>(3, 3) << 591.02482981, -0.26160718, 347.10028729, 0.0, 594.53920305, 211.70964625, 0.0, 0.0, 1.0);
cv::Mat cameraMatrix2 = (cv::Mat_<double>(3, 3) << 597.91014066, -0.06403916, 337.37116277, 0.0, 602.74968283, 216.70548617, 0.0, 0.0, 1.0);
cv::Mat distCoeffs1 = (cv::Mat_<double>(5, 1) << 0.04620326, 0.00084191, -0.00056648, -0.00420301, -0.20072713);
cv::Mat distCoeffs2 = (cv::Mat_<double>(5, 1) << 0.06399693, -0.06656621, 0.00105274, -0.00153776, -0.16573330);
cv::Size imageSize(640, 480);
cv::Mat R = (cv::Mat_<double>(3, 3) << 0.99992918, -0.00770894, 0.00906646, 0.00777881, 0.99994012, -0.00769691, -0.00900658, 0.00776689, 0.99992928);
cv::Mat T = (cv::Mat_<double>(3, 1) << -150.65606533, -1.03590462, 2.47469780);
cv::Mat R1, R2, P1, P2, Q;
cv::stereoRectify(cameraMatrix1, distCoeffs1, cameraMatrix2, distCoeffs2, imageSize, R, T, R1, R2, P1, P2, Q);
cv::FileStorage fw("out.txt", cv::FileStorage::WRITE);
fw << "R1" << R1;
fw << "R2" << R2;
fw << "P1" << P1;
fw << "P2" << P2;
fw.release();
return 0;
}
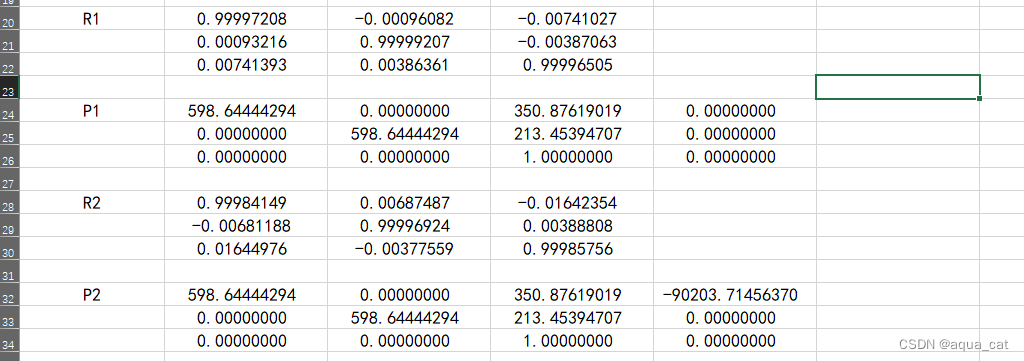
最后得到四个新矩阵:R1、R2、P1、P2。
计算IR矩阵
IR矩阵是HLS视频库中InitUndistortRectifyMapInverse函数的其中一个输入,InitUndistortRectifyMapInverse相当于是Opencv中的initUndistortRectifyMap函数,但是因为FPGA中不好计算矩阵的逆,所以需要我们计算好了再用作输入,具体参考:InitUndistortRectifyMapInverse
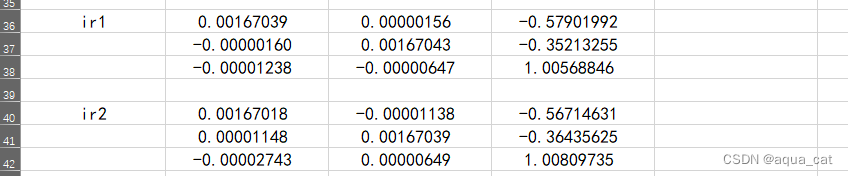
计算IR矩阵实现:
R1 = [0.99997208, -0.00096082, -0.00741027;
0.00093216, 0.99999207, -0.00387063;
0.00741393, 0.00386361, 0.99996505;];
P = [598.64444294, 0.00000000, 350.87619019;
0.00000000, 598.64444294, 213.45394707;
0.00000000, 0.00000000, 1.00000000;];
R2 = [0.99984149, 0.00687487, -0.01642354;
-0.00681188, 0.99996924, 0.00388808;
0.01644976, -0.00377559, 0.99985756;];
ir1 = inv(P * R1);
ir2 = inv(P * R2);
立体校正
计算得到ir矩阵后,就可以使用InitUndistortRectifyMapInverse函数与remap进行立体校正,左相机校正具体实现(右相机修改对应参数即可):
#define HEIGHT 480
#define WIDTH 640
typedef hls::stream< ap_axiu<8,1,1,1> > AXIS_GRAY;
typedef xf::cv::Mat<XF_8UC1, HEIGHT, WIDTH, XF_NPPC1, 0> GRAY_IMAGE;
typedef xf::cv::Mat<XF_32FC1, HEIGHT, WIDTH, XF_NPPC1, 0> MAP_IMAGE;
void Image_Correct_L(AXIS_GRAY &Video_Input, AXIS_GRAY &Video_Output)
{
#pragma HLS INTERFACE axis port = Video_Input
#pragma HLS INTERFACE axis port = Video_Output
#pragma HLS INTERFACE ap_ctrl_none port = return
GRAY_IMAGE Image_Input, Image_Output;
MAP_IMAGE Image_Mapx, Image_Mapy;
ap_fixed<32, 12> cameraMatrix[9], distCoeffs[5], ir[9];
cameraMatrix[0] = 591.02482981;
cameraMatrix[1] = -0.26160718;
cameraMatrix[2] = 347.10028729;
cameraMatrix[3] = 0.00000000;
cameraMatrix[4] = 594.53920305;
cameraMatrix[5] = 211.70964625;
cameraMatrix[6] = 0.00000000;
cameraMatrix[7] = 0.00000000;
cameraMatrix[8] = 1.00000000;
distCoeffs[0] = 0.04620326;
distCoeffs[1] = 0.00084191;
distCoeffs[2] = -0.00056648;
distCoeffs[3] = -0.00420301;
distCoeffs[4] = -0.20072713;
ir[0] = 0.00167039;
ir[1] = 0.00000156;
ir[2] = -0.57901992;
ir[3] = -0.00000160;
ir[4] = 0.00167043;
ir[5] = -0.35213255;
ir[6] = -0.00001238;
ir[7] = -0.00000647;
ir[8] = 1.00568846;
#pragma HLS DATAFLOW
xf::cv::AXIvideo2xfMat(Video_Input, Image_Input);
xf::cv::InitUndistortRectifyMapInverse<9, 5, XF_32FC1, HEIGHT, WIDTH, XF_NPPC1, 0, 0>
(cameraMatrix, distCoeffs, ir, Image_Mapx, Image_Mapy, 9, 5);
xf::cv::remap<16, XF_INTERPOLATION_BILINEAR, XF_8UC1, XF_32FC1, XF_8UC1, HEIGHT, WIDTH, XF_NPPC1, false, 0, 0, 0, 0>
(Image_Input, Image_Output, Image_Mapx, Image_Mapy);
xf::cv::xfMat2AXIvideo(Image_Output, Video_Output);
}
HLS平台仿真代码:
#include "correct.h"
#include <iostream>
#include "opencv2/opencv.hpp"
#include "common/xf_axi.hpp"
int main(void)
{
AXIS_GRAY Video_IN, Video_OUT;
cv::Mat mat_in = cv::imread("Left.bmp", 0);
cv::Mat mat_out = cv::Mat::zeros(HEIGHT, WIDTH, CV_8U);
xf::cv::cvMat2AXIvideoxf<XF_NPPC1, 8>(mat_in, Video_IN);
Image_Correct_L(Video_IN, Video_OUT);
xf::cv::AXIvideo2cvMatxf<XF_NPPC1, 8>(Video_OUT, mat_out);
cv::imwrite("out.jpg", mat_out);
return 0;
}
左相机校正结果
右相机校正结果

总结
因为原本相机的镜头畸变较小,所以校正后的图像并没有损失太多的有效显示面积。在HLS中完成设计与功能仿真后,就可以生成相应的IP模块,在Vivado中使用。















 7084
7084











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









