









一般点云生成过程所涉及到的坐标系统主要包括激光扫描仪坐标系、惯导坐标系、当地水平坐标系、地心地固坐标系。坐标系的变换如下所示:
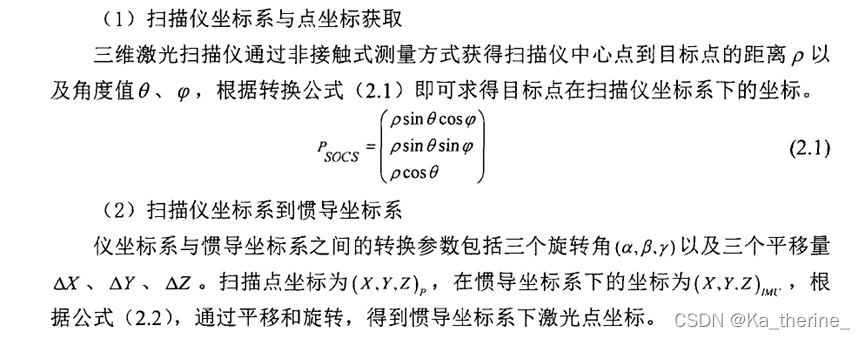
1)扫描仪坐标系
扫描坐标系(Scanner’s Own Coordinate System),原点0为激光发射点,X轴指向载体前进方向,Y轴垂直向上, Z轴垂直于X轴,构成右手系。
2)惯导坐标系
惯性平台IMU坐标系(Body Frame System),原点0为惯性平台参考中心,坐标系按惯性平台内部参考标架定义,Y轴指向载体纵轴向前,载体前进方向向右为X轴,Z轴垂直向上构成右手系。
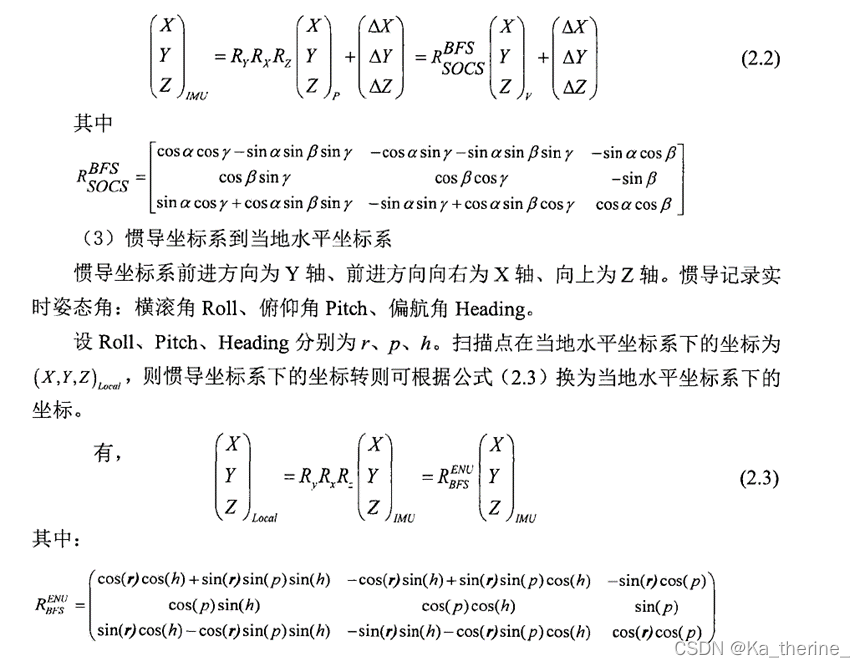
3)当地水平坐标系
当地水平坐标系坐标原点(Local-Level Frame System),原点位于GNSS相位中心,X轴指向东、Y轴指向真北方向、Z轴沿椭球法线方向构成右手系。根据坐标轴方向不同,当地水平坐标系可选为东北天、北东地、和北西天等右手坐标系,不同的选择方式主要和应用场景有关,文中实验均采用的是东北天形式。
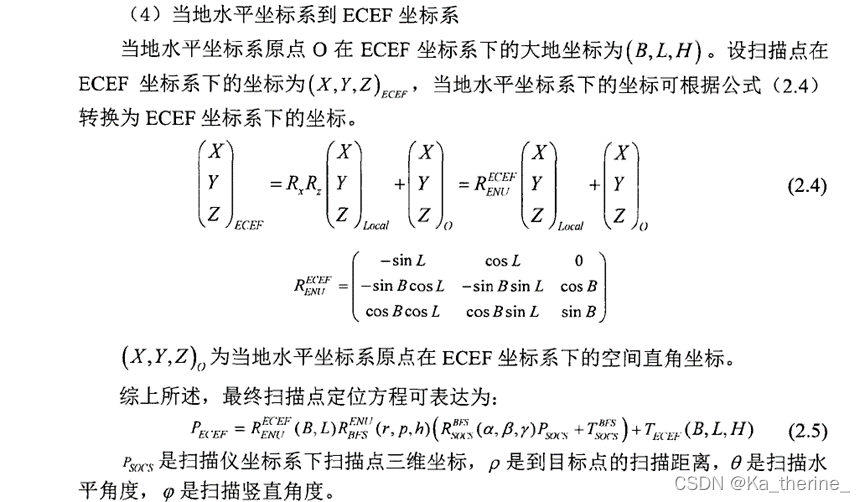
4)地心地固坐标系
地心地固坐标系(Earth Center Earth Fixed Frame System),简称地心坐标系,是一种以地心为原点的地固坐标系。原点0为地球质心,Z轴与地轴平行指向北极点,X轴指向本初子午线与赤道的交点,Y轴垂直于XOZ平面(即东经90°与赤道的交点)构成右手坐标系。
在当地水平坐标系的时候,由于惯导不同需要确认当地水平坐标系是北东下(NED)还是东北天,如果是北东下,那么可以直接利用上面的公式进行坐标转换,
*****如果是东北天(ENU),需要将北东下坐标系转换到东北天即可按照下面的公式转换到ECEF坐标系。转换旋转矩阵如下,要么在这里进行转换,要么在进行最后一步转到ECEF坐标时选择与东北天对应的旋转矩阵。
公式:
上面给的转换到ECEF坐标的旋转矩阵则是ENU到ECEF的旋转矩阵。下面会给出ENU到ECEF的旋转矩阵。
From ENU to ECEF



















 1258
1258

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











