







操作环境:
MATLAB 2022a
1、算法描述
改进A*算法的优点分析
改进A*算法相对于传统A*算法在多个方面进行了优化,包括避免斜穿障碍物顶点、删除中间多余节点以及提高搜索效率。这些改进措施使得路径规划更加高效、安全和可靠,特别是在复杂环境中表现尤为突出。本文将详细讨论这些改进及其带来的优点。
1. 避免斜穿障碍物顶点,避免碰撞
在路径规划过程中,斜穿障碍物顶点会带来很大的风险,可能导致机器人或自动驾驶车辆与障碍物发生碰撞。传统的A*算法在扩展邻接节点时,没有考虑这一点,可能会选择那些斜穿障碍物顶点的路径,从而增加碰撞的风险。改进A*算法通过对邻接节点的严格检查,避免了这种情况的发生。
具体来说,改进A*算法在扩展当前节点的邻接节点时,会检测这些节点是否与障碍物顶点相邻,如果是,则不将该节点加入开放列表。这样一来,生成的路径将不会斜穿任何障碍物顶点,从而避免了潜在的碰撞风险。这种约束确保了路径的安全性,提高了算法在实际应用中的可靠性。
这一改进在实际应用中具有重要意义。特别是在机器人导航、无人机飞行和自动驾驶等领域,路径的安全性至关重要。通过避免斜穿障碍物顶点,改进A*算法能够生成更安全、更可靠的路径,有效避免潜在的碰撞风险。这不仅保护了设备的安全,还保护了周围环境和人类的安全。
2. 删除中间多余节点,减少转折
传统A*算法生成的路径往往包含许多不必要的中间节点,这些节点会增加路径的转折点,使路径变得曲折,从而增加行驶时间和能耗。改进A*算法通过优化路径,删除不必要的中间节点,从而减少转折点,使路径更加平滑。
在路径生成过程中,改进A*算法首先生成一条初始路径,然后对该路径进行进一步优化。具体来说,算法会检查路径中的每个节点,并删除那些不影响路径连通性的中间节点。这一优化过程显著减少了路径中的转折点,使路径更加平滑和直观。
这种改进不仅减少了机器人或车辆的行驶时间和能耗,还提高了路径的效率和可靠性。平滑的路径意味着机器人或车辆可以更高效地移动,减少了频繁转向的时间和能量消耗。同时,减少转折点也降低了路径规划的复杂性,使得算法在实际应用中更加易于实现。
3. 提高搜索效率
改进A*算法在提高搜索效率方面也做了许多优化。传统A*算法在搜索过程中,会扩展大量的节点,特别是在复杂环境中,计算量非常大。改进A*算法通过多种方式提高了搜索效率,包括优化启发函数和调整节点扩展策略。
首先,改进A*算法使用了一种改进的启发函数,结合了路径成本和障碍率的因素,使得评价函数更加准确。这种启发函数不仅考虑了当前路径的成本,还考虑了从当前节点到目标节点之间的障碍物数量,从而更准确地评估每个节点的优先级。具体来说,评价函数采用了以下形式:
𝑓(𝑛)=𝑔(𝑛)+(1−log(𝑃))⋅ℎ(𝑛) g(n)是当前节点到目标节点的估计成本,h(n) 是起始点与目标点之间的障碍率,表示障碍物的数量与栅格总数之比。通过引入障碍率,改进A*算法能够更有效地避开障碍物,提高了路径规划的效率。
其次,改进A*算法在扩展节点时,会优先扩展那些更有可能通向目标节点的节点。具体来说,算法会根据启发函数的值对邻接节点进行排序,优先扩展那些评价函数值较小的节点,从而减少了不必要的计算量。这些优化措施显著提高了算法的搜索效率,特别是在复杂环境中,能够更快地找到最优路径。
4. 路径的三次优化
改进A*算法不仅在初始路径生成时进行了优化,还通过多次优化进一步提高了路径的质量。具体来说,改进A*算法在生成初始路径后,会对路径进行三次优化,分别删除不必要的中间节点、调整路径使其更加平滑以及进一步删除转折点。
第一次优化通过Line_OPEN_ST函数对路径进行处理,删除不必要的中间节点。第二次优化通过Line_OPEN_STtwo函数进一步平滑路径,减少转折点。第三次优化再次通过Line_OPEN_STtwo函数对路径进行调整,确保路径尽可能直。
这种多次优化的策略使得最终生成的路径不仅安全可靠,而且平滑高效。这在实际应用中具有重要意义,特别是在复杂环境中,优化后的路径能够更好地适应环境的变化,提高路径规划的鲁棒性和适应性。
5. 实际应用中的效果
通过对比传统A*算法和改进A*算法在实际应用中的效果,可以看出改进A*算法在多个方面表现出了显著的优势。在路径的安全性方面,改进A*算法通过避免斜穿障碍物顶点,有效减少了潜在的碰撞风险,保证了路径的安全可靠。在路径的平滑性方面,改进A*算法通过删除中间多余节点和减少转折,使路径更加直观和平滑,提高了路径的效率和可靠性。在搜索效率方面,改进A*算法通过优化启发函数和调整节点扩展策略,显著减少了计算量,提高了路径规划的速度。
例如,在机器人导航中,改进A*算法能够生成更加安全和平滑的路径,使机器人能够更高效地到达目标位置。在自动驾驶中,改进A*算法能够生成更加可靠和高效的行驶路径,减少车辆的行驶时间和能耗。在无人机飞行中,改进A*算法能够生成更加安全和高效的飞行路径,避免碰撞风险,提高飞行效率。
6. 进一步改进的潜力
尽管改进A*算法在多个方面表现出优越的性能,但仍有进一步改进的潜力。首先,在处理动态环境时,改进A*算法可以结合实时环境感知技术,动态调整路径,提高路径规划的实时性和适应性。其次,在处理多目标路径规划时,改进A*算法可以结合多目标优化算法,同时考虑多个目标,提高路径规划的综合性能。此外,改进A*算法还可以结合机器学习技术,通过学习环境特征和路径规划经验,进一步提高路径规划的效率和可靠性。
总结
改进A*算法通过避免斜穿障碍物顶点、删除中间多余节点和提高搜索效率,在路径规划中展现出优越的性能。具体来说,这些改进使得路径更加安全、平滑和高效,特别适用于机器人导航、无人机飞行和自动驾驶等领域。
-
避免斜穿障碍物顶点:通过严格检查邻接节点,避免路径斜穿障碍物顶点,提高了路径的安全性和可靠性。
-
删除中间多余节点,减少转折:通过路径优化,删除不必要的中间节点,使路径更加平滑,减少了行驶时间和能耗。
-
提高搜索效率:通过优化启发函数和节点扩展策略,减少了不必要的计算量,显著提高了算法的搜索效率。
-
路径的三次优化:通过三次优化策略,进一步提高了路径的质量,使路径更加平滑和高效。
-
实际应用中的效果:在机器人导航、自动驾驶和无人机飞行等实际应用中,改进A*算法展现出了显著的优势。
-
进一步改进的潜力:结合实时环境感知、多目标优化和机器学习技术,改进A*算法具有进一步提升的潜力。
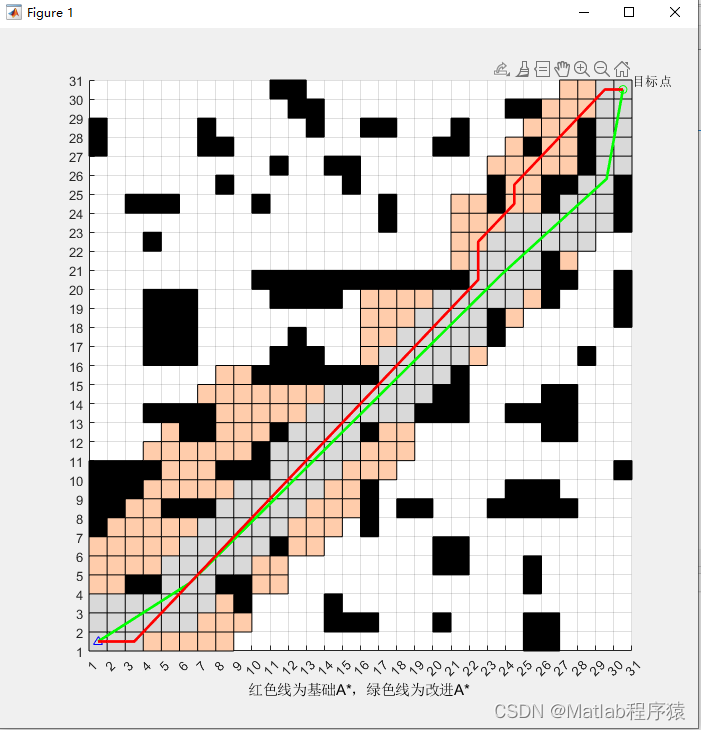
2、仿真结果演示
3、关键代码展示
略
4、MATLAB 源码获取
V
点击下方名片















 1471
1471











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











