







 本文对比了ADIS16448与MPU6050在无人机飞行中的表现,通过波形图和飞行测试视频展示了ADIS16448在精度和稳定性上的优势。使用tbus-tiny_ekf进行融合,揭示了低质量IMU数据对飞行控制的影响。测试表明,即使在1.66Hz的定位频率下,ADIS16448配合新型滤波器能提供更稳定、准确的飞行体验。
本文对比了ADIS16448与MPU6050在无人机飞行中的表现,通过波形图和飞行测试视频展示了ADIS16448在精度和稳定性上的优势。使用tbus-tiny_ekf进行融合,揭示了低质量IMU数据对飞行控制的影响。测试表明,即使在1.66Hz的定位频率下,ADIS16448配合新型滤波器能提供更稳定、准确的飞行体验。
众所周知,一款好的imu对无人机姿态是多么的重要,曾经我们使用mpu6050、mpu9250等百元级的imu,这种imu在零偏、线性度、白噪声、温飘、轴间对齐、scale线性度等方面都显得力不从心。ardupilot、px4等固件不得不使用大量的低通滤波器来过滤噪声,达到了感觉上飞的还不错的程度。
但是在对无人机姿态要求比较高的情况下,特别是在工业应用中,显然像mpu6050这类IMU是无法满足我们要求的。这次我们就尝试把ADIS16448这款低成本高精度的IMU融合无人机上,当然,因为这款IMU在ardupilot固件中缺乏驱动无法直接使用,加之我手上刚好在做多传感器融合的方案,所以直接就用自己写的tbus-tiny_ekf来做这次的融合,大家如果有时间也可以尝试自己写驱动来测试看看。
ADIS16448简介
adis16448,是analog device公司面向市场的千元级低成本10自由度惯性导航产品,内置3轴陀螺仪、3轴加速度计、3轴磁力计、1个气压计。内置的所有传感器都有严格的工厂校准(到手就可以用啦-_-,再也不担心找不到重力矢量)
tips:气压计有点坑,暂时还是推荐使用ms5611比较靠谱
一、波形图对比
接下来我们通过波形对比来了解这款高精度IMU(本篇测试皆采用linux实时飞控板ALICE):
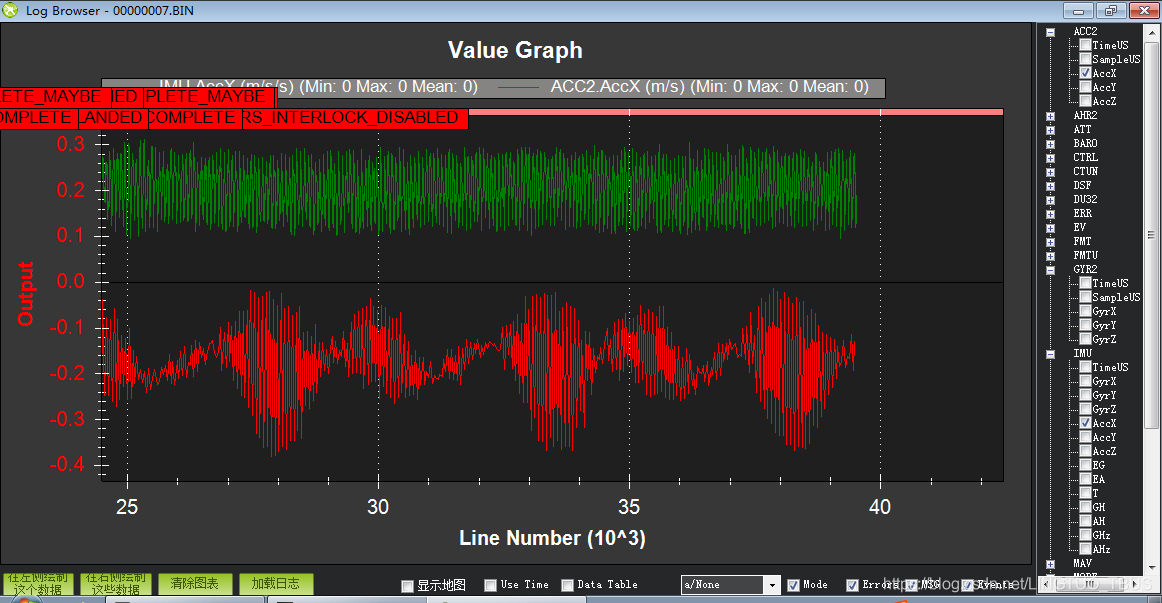
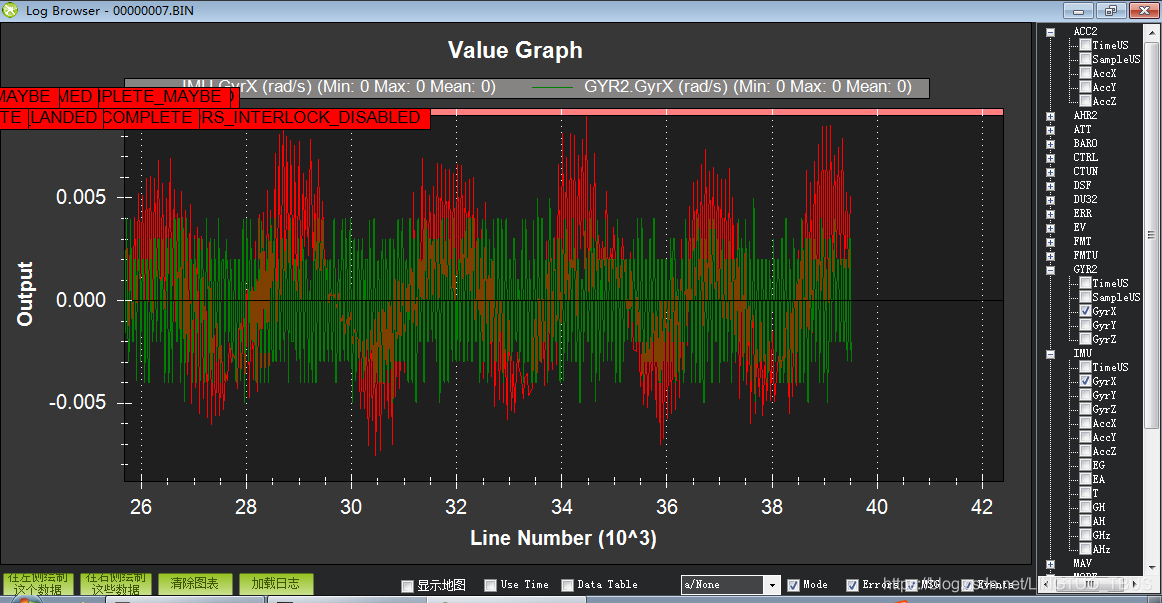
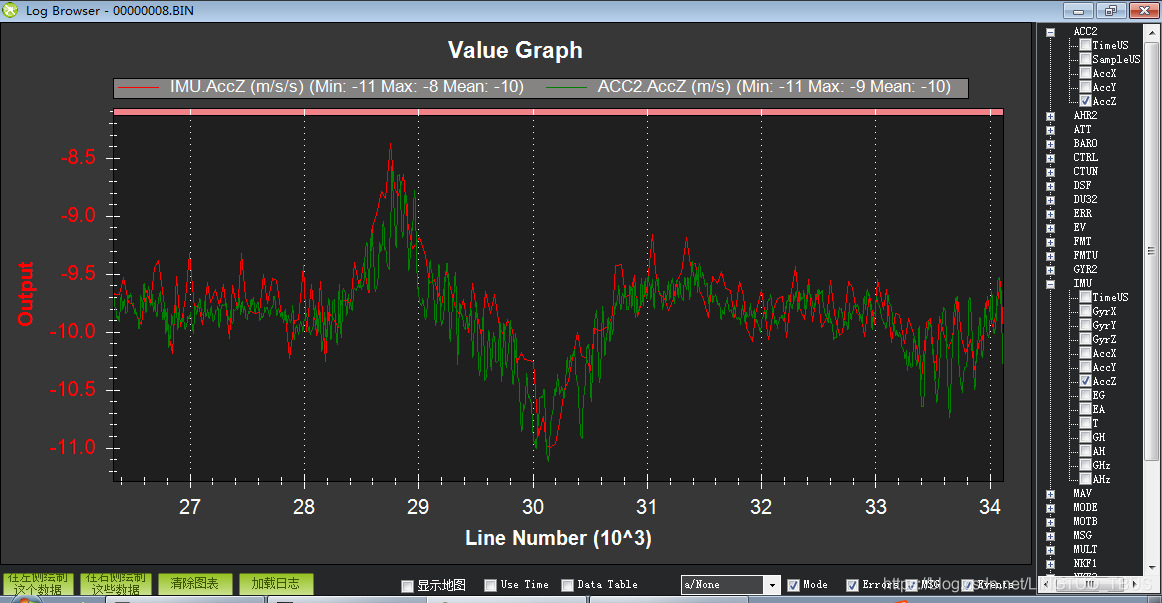
<注:图中绿色为ADIS16448,红色为MPU6050>
静止状态
图一:加速度计白噪声对比
图二:陀螺仪白噪声对比
悬停状态
图三:加速度计白噪声对比
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1559
1559

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









