






目录
💥1 概述
📚2 运行结果
🎉3 参考文献
👨💻4 Matlab代码
💥1 概述
无论是追求认知的高级生命体、还是期望智能的机器人,都面临着定位问题;对于高级生命体,该问题过于庞大,从产业、社会、历史等维度皆可剖析;对于探求弱人工智能的机器人来说,定位问题的定义相对简单,即确定机器人本体在某种坐标系下的位姿和/或环境结构。为解决泛机器人的定位问题,通常会涉及多类传感器的使用。譬如,室外场景下常使用的GNSS(Global Navigation Satellite Syste, 全球导航卫星系统), 室内环境下使用的WiFi定位、超宽带定位、蓝牙定位等,水下场景中常使用的USBL(Ultra Short Base Line,超短基线)等声学基线定位。上述定位传感器方案,通常需要接收外部信号(譬如GNSS定位需要接收到至少4颗卫星的信号),且能够获得世界坐标系下的绝对位置。另外,还存在无需外界信号输入的传感器,譬如IMU(Inertial Measurement Unit,惯性测量单元)、激光雷达、摄像头、轮式里程计等,该类型方案无需接收外界信号、但无法获得世界坐标系下的绝对位置。实际应用场景中,通常会融合各类传感器,比如自动驾驶汽车会组合使用GNSS、激光雷达、摄像头、IMU等传感器。由于成本低、感知信息丰富,摄像头已经成为众多智能设备的标配,利用摄像头进行定位也在实际中得到广泛应用;本文后续对基于图像的视觉定位技术进行概述 。
将视觉技术用于定位可以追溯至上个世纪,但让视觉定位技术声名大噪、为公众熟知,估计是2003年美国宇航局发射的“机遇号”火星探测器。火星探测器登陆的火星属于未知环境的星球,在上面进行科学研究时,面对复杂的大规模环境,且无法对其进行实时遥控时,必须通过同步实现定位与地图创建才能完成导航任务,因此火星车上配置有视野较大、黑白的导航相机,且使用了大家熟知的SLAM(Simultaneous Localization And Mapping,同步定位与建图)技术。除了在科研军事领域有其相关应用外,视觉定位技术在当今的商业领域也有着广泛的应用。譬如,微软的混合现实头戴式显示器Hololens 2,特斯拉具有Autopilot智能辅助驾驶功能的Model Y系列汽车,荣获2020 5G全球应用大赛唯一金奖的华为河图,iRobot搭载摄像头、可实现高效全景导航的Roomba i7+系列扫地机器人,贝壳如视的VR看房系统,大疆科技的Mavic、精灵、FPV,零零无限的V-Coptr(图7)等系列消费级无人机。
📚2 运行结果
主函数部分代码:
%%视觉定位模块画图
a=csvread('data.csv');
fix_speed_x=a(:,1);%修正后X速度
fix_speed_y=a(:,2);
fix_dot_x=a(:,3);%修正后X坐标
fix_dot_y=a(:,4);
fix_dot_z=a(:,5);
laser_high=a(:,6);%激光测距高度
camera_h=1000.0;%
picture_L=877.0;%图片长%
picture_W=651.0;%图片宽%
D=20.0;%D是目标点实际的直径,单位mm%
unit_distance=(picture_W/120)*(laser_high/camera_h);
% unit_distance=(picture_L/160)*(High/camera_h);
x_real=fix_dot_x.*unit_distance;
%x_real=fix_dot_x.*unit_distance/100;
y_real=fix_dot_y.*unit_distance;
%y_real=fix_dot_y.*unit_distance/100;
z_real = fix_dot_z/50.0*D;%单位m
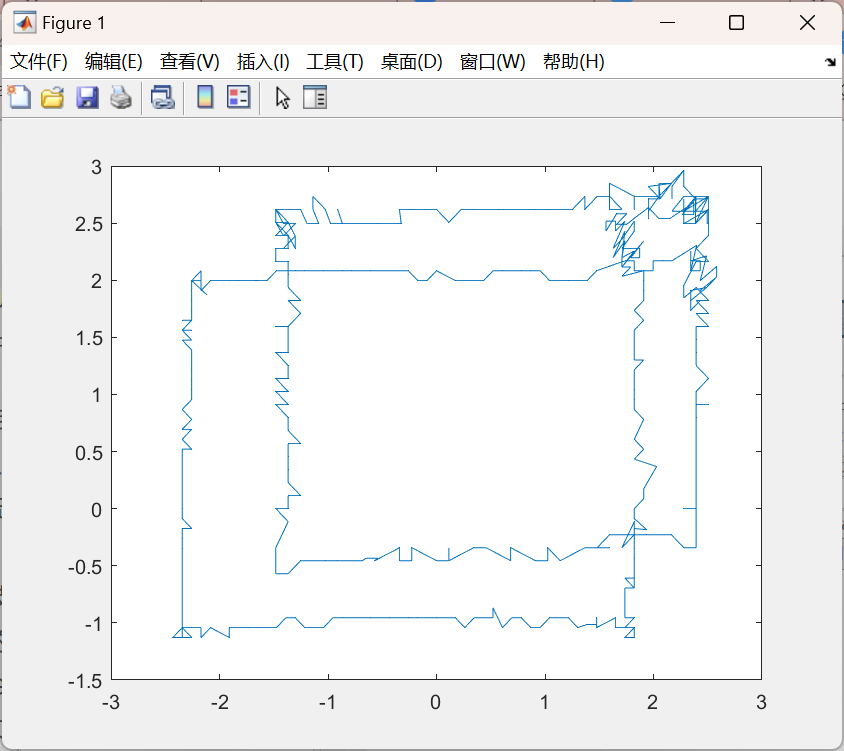
figure(1);%%xy平面
plot(x_real,y_real);
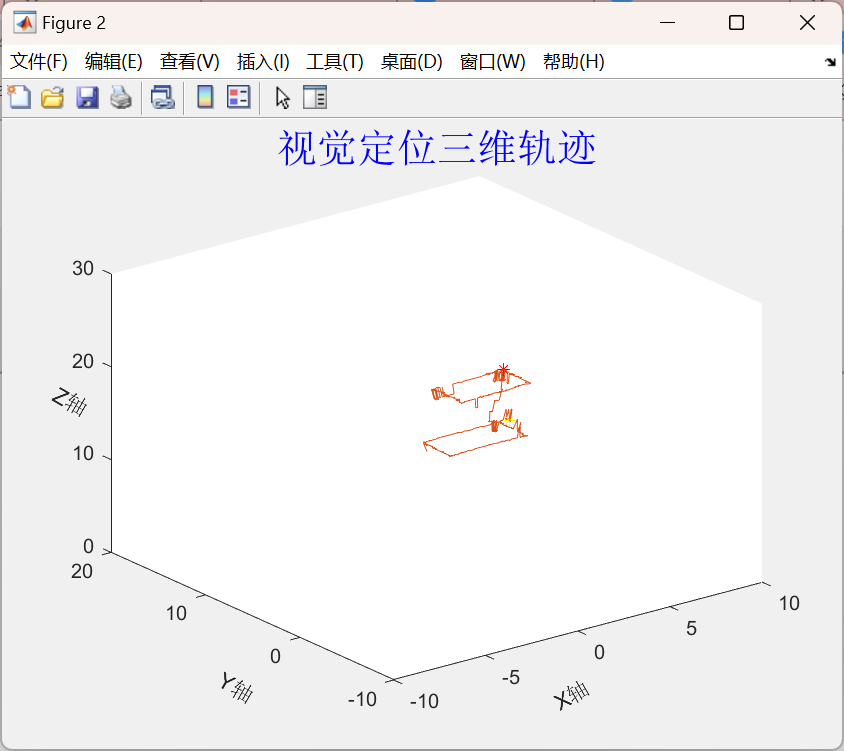
figure(2);%%三维
plot3(2.50,2.73 ,21 ,'r*');
hold on;
plot3(x_real,y_real,laser_high);
plot3(2.3436,1.8228 ,16 ,'y*');
hold on;
title('视觉定位三维轨迹','fontname','宋体','Color','b','FontSize',20);
x1=xlabel('X轴');
x2=ylabel('Y轴');
x3=zlabel('Z轴');
set(x1,'Rotation',30);
set(x2,'Rotation',-30);
set(x3,'Rotation',-30);
axis([-10 10 -10 20 0 30]);
🎉3 参考文献
[1]葛全益,钟涵海,侯冰,张晓龙,卢晓龙.基于SSD的轻量化无人机视觉定位算法[J].电子测试,2022(19):60-62.
部分理论引用网络文献,若有侵权联系博主删除。
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









