







文章目录
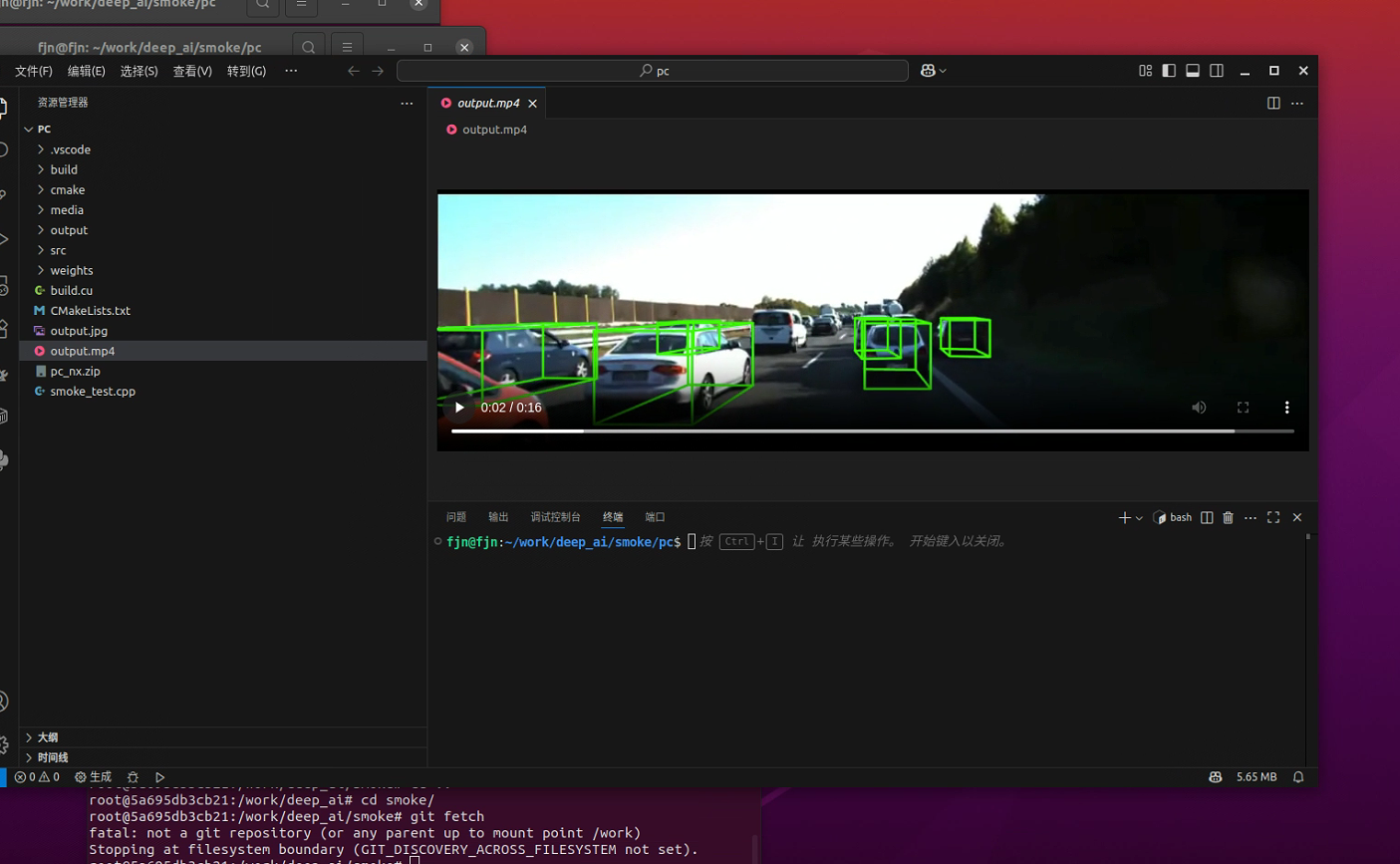
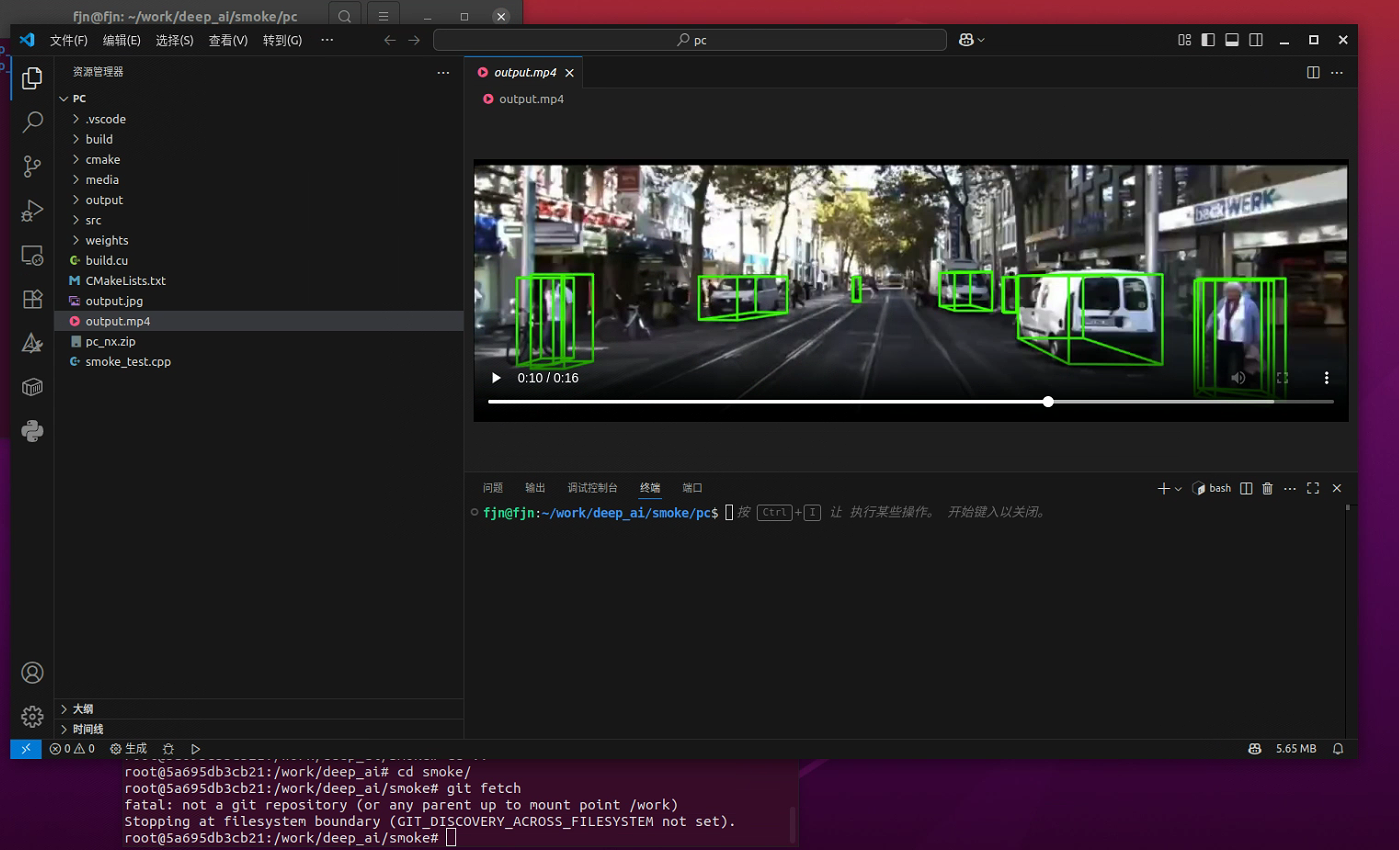
SMOKE 3D:从 Python 到 C++ 实现车辆与行人单目 3D 视觉识别在 RK3588 上的深度部署
引言:从2D到3D——边缘AI的感知升级
在自动驾驶、机器人导航、智能监控等诸多领域,仅仅识别出物体在2D图像中的位置(目标检测)已不足以满足需求。我们更需要知道物体在真实世界中的精确三维位置、大小和姿态(3D目标检测)。这使得机器能够理解场景的深度和空间关系,从而进行更复杂的决策和交互。
传统的3D目标检测通常依赖于昂贵的传感器(如激光雷达、毫米波雷达)或多摄像头设置(立体视觉)。然而,单目3D目标检测则旨在仅使用单张RGB图像来推断3D信息,这极大地降低了硬件成本和系统复杂性,非常适合边缘计算设备如RK3588的部署。
SMOKE (Single-stage Monocular Keypoint-based 3D Object Detection) 正是这种背景下的一个杰出代表。它摒弃了传统方法中对独立2D检测器的依赖,创新性地通过回归

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









