







 本文详细探讨了强化学习中的eligibility traces概念,及其在TD(λ)算法中的应用。文章通过对比MC和one-step TD方法,阐述了eligibility traces如何提供一种平滑过渡,并在不同场景下展示其优势。文章进一步讨论了不同类型的TD算法,包括TD(λ)、TTD(λ)、True Online TD(λ)和Sarsa(λ),以及它们的优缺点。此外,还介绍了variable λ和γ的使用,以及在off-policy学习中的eligibility traces策略。文章结尾提到了在实际应用中eligibility traces方法的实现问题和优势。
本文详细探讨了强化学习中的eligibility traces概念,及其在TD(λ)算法中的应用。文章通过对比MC和one-step TD方法,阐述了eligibility traces如何提供一种平滑过渡,并在不同场景下展示其优势。文章进一步讨论了不同类型的TD算法,包括TD(λ)、TTD(λ)、True Online TD(λ)和Sarsa(λ),以及它们的优缺点。此外,还介绍了variable λ和γ的使用,以及在off-policy学习中的eligibility traces策略。文章结尾提到了在实际应用中eligibility traces方法的实现问题和优势。
一、前言
Eligibility Traces是强化学习的基本原理之一。例如TD( λ λ )算法,( λ λ )表示eligibility traces的使用情况。几乎所有TD方法,如 Q-Learning或Sarsa,都可以和eligibility traces结合起来生成更高效通用的方法。
Eligibility Traces可以用于泛化TD和MC(蒙特卡罗)方法。当用eligibility traces增强TD后,会产生一系列方法,包括两个极端的方法:MC( λ=1 λ = 1 )和 one step TD( λ=0 λ = 0 )。位于两者中间的方法比这两方法好。Eligibility Traces也提供了将MC方法用于在线连续问题的方式。
第7章中,我们介绍了一种连接TD和MC方法的n-step TD。Eligibility Traces的连接方式提供了一种更为优雅的算法机制,有很大的计算优势。该机制包含一个短期记忆向量,Eligibility Traces zt∈Rd z t ∈ R d ,对应一个长期权重向量 wt∈Rd w t ∈ R d 。基本思想是 wt w t 中参与生成estimated value的元素对应的 zt z t 中的元素波动并逐渐衰减。如果在trace衰减到0之前,TD error不为零时,则该 wt w t 中参与生成estimated value的元素会一直持续学习。trace-decay 参数 λ∈[0,1] λ ∈ [ 0 , 1 ] ,表示trace的后退速度。
与n-step方法相比:
- Eligibility Traces方法只需要存储一个trace vector,而不是n个最新的feature vectors。
- 而且学习过程是连续且时间均匀的,不会有延迟。不需要在episode结束时刻立即进行所有运算。
- 学习可以立刻影响行为,不需要n step后才延迟生效。
Eligibility Traces 表明学习算法换种方式进行运算可能会获得一定的计算优势。很多算法都比较符合自然逻辑,向前看几步,根据未来的预测调整当前的量,如MC算法根据future reward的所有量,来更新state,n-step TD根据next n rewards来更新。这种向前看的形式,称为 forward views。通常 forward views不太实用,因为更新依赖于当前不可得到的量。本章中,我们将介绍另一种类似的更新方式,有时甚至完全一样,采用eligibility trace从当前TD error 向后看最近经过的states。这种方式称为 backward views。
本章首先,从 state value和 prediction 问题说起,再将其扩展到action value和control 问题中。先讨论on-policy问题,再扩展到off-policy问题。重点讨论 linear function approximation。
二、The λ λ - return
第7章中定义了n-step return

对tabular learning而言,该式可作为 approximate SGD learning update 的update target。这个结论对n-step returns的平均值也成立,只要权重和为1,如 12Gt:t+2+12Gt:t+4 1 2 G t : t + 2 + 1 2 G t : t + 4 ,这种组合return的方式和 n-step return 一样通过减小 TD error来更新,因此可以保证算法收敛。 Averaging方式可以衍生出一系列新算法,如将 one-step 和infinite-step return平均获得 TD和MC之间的另一种算法,通过将experience-based update 和 DP update 取平均值,可以将experience-based 和model-based 方法结合。
这种将简单元素取平均的更新方式叫做 compound update。 12Gt:t+2+12Gt:t+4 1 2 G t : t + 2 + 1 2 G t : t + 4 就是一种compound update,其backup 图如下:
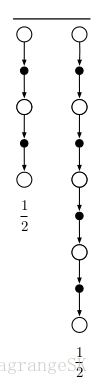
A compound update can only be done when the longest of its component
updates is complete。该更新只有在t+4时刻才能估计t时刻的值。一般会限制最长元素的长度,因为会延迟update的响应。
TD( λ λ )算法是一种特殊的averaging n-step update,包括所有n-step updates,权重系数分别为 λn−1 λ n − 1 , λ∈[0,1] λ ∈ [ 0 , 1 ] ,由(1- λ λ )归一化处理, λ λ -return 定义如下:

backup 图如图所示:
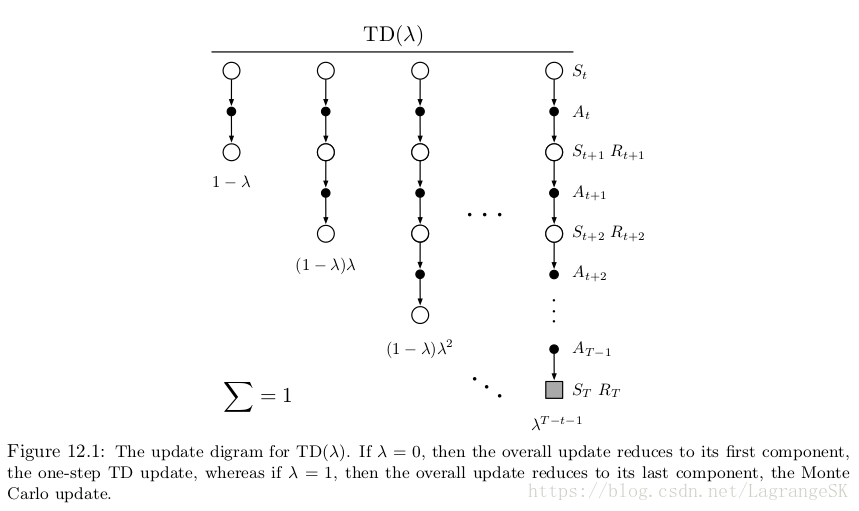
所有子n-step return的总和为 Gt G t :

当 λ=1 λ = 1 时,为MC方法的return,当 λ=0 λ = 0 时,为one-step TD的 return。
现在定义以 λ λ -return 为update target的第一个算法——off-line λ λ -return algorithm。在episode中,权重向量不变,episode结束时,整个off-line update 序列按照 semi-gradient rule更新:

λ λ -return 使得MC和one-step TD可以平顺过渡,以19-state random walk task(第七章例子)为例,和n-step TD 结果进行比较:
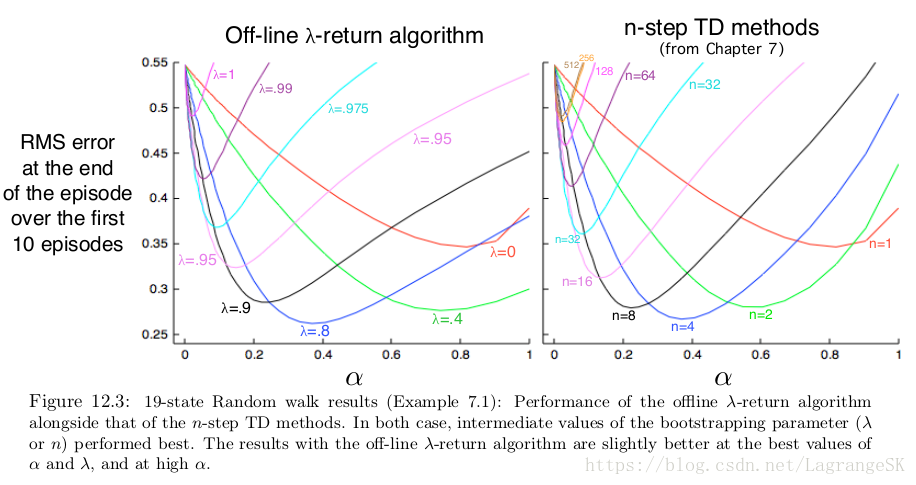
整体结果差不多,两个任务中,都是中间参数表现比较好,即n-step方法中n取中间值, λ λ -return算法中 λ λ 取中间值。
目前我们讨论的方法都叫做 forward views算法。这什么意思呢?想向我们是一个拿着望远镜的小人,在每一个state处都可以看到未来一些时刻的事情。
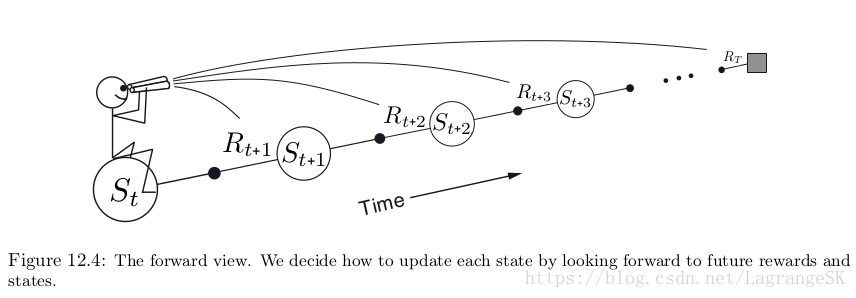
看到了之后,我们会更新当前state,然后我们来到了下一个state,就不需要之前的states啦!future states会被不断观测和改变。
三、TD( λ λ )
TD( λ λ ) 是强化学习中最古老且应用最广泛的算法,也是第一个阐述了forward-view 和backward-view间联系的算法(It was the first algorithm for which a formal relationship was shown between a more theoretical forward view and a more computationally congenial backward view using eligibility traces.)本节我们将介绍如何逼近上一小节提到的 off-line λ λ -return algorithm。
TD( λ λ )对off-line ( λ λ )-return算法进行了三点提升:
- 单步更新权重向量,无需等到episode结束,学习更快
- 计算在时间上均匀分布
- 不仅可用于episode问题,还适用于连续问题
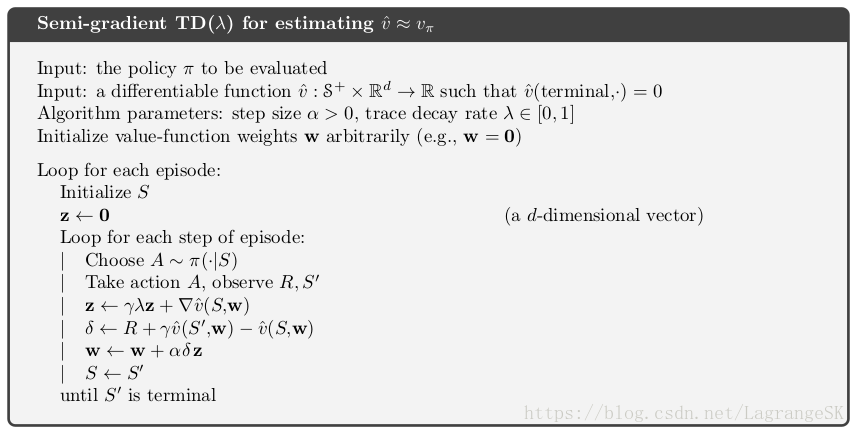
本节介绍semi-gradient version of TD( λ λ ) with function approximation。在函数逼近时,eligiblility trace zt∈Rd z t ∈ R d 和权重向量 wt w t 的元素个数相同,但权重向量有长期记忆,存在时间和系统等长, zt z t 是短期记忆,存在时间小于一个episode长度。eligiblility trace存在于学习过程中,their only consequence is that they affect the weight vector, and then the weight vector determines the estimated value。
在TD( λ λ ) 中,eligiblility trace vector 在episode开始时初始化为0,每个time step 由value梯度更新,且以 γλ γ λ 衰减:

γ γ 是discount rate,eligiblility trace一直追踪那些对recent state valuation有贡献的权重向量。这里 recent 是以 γλ γ λ 界定的。回忆线性函数逼近, ∇v̂ (St,wt) ∇ v ^ ( S t , w t ) 是特征向量 xt x t ,于是eligiblility trace vector只是所有过去衰减的输入向量和。trace暗示了当reinforcing event出现时的权重向量元素的重要程度,reinforcing event只得是one-step TD errors。state-value prediction的TD error为

在TD( λ λ )中,权重更新公式为

算法伪代码如下:
TD( λ λ )是backward in time的,即每个时刻,我们由当前TD error,按照对当前eligiblility trace的贡献程度,将其分配给之前的states。可以想象我们是一个拿着话筒的小人。沿着state 流计算 TD error,然后对之前经过的state 回喊。
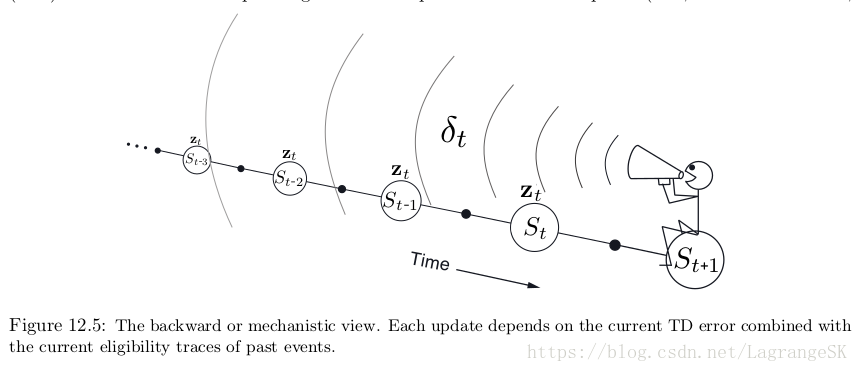
有了TD error和trace,根据式(12.7)可以进行更新,当这些过去经历的states再次出现时更新他们的state value。
为了更好的理解backward view,从
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1955
1955

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









