






四旋翼飞行器编队避险飞行matlab仿真
附带参考文件
ID:31120717015209079
骡马市冲浪的虾条
四旋翼飞行器编队避险飞行是无人机技术中的一个重要研究领域,它涉及到飞行控制、路径规划、传感器融合等多个技术方面。本文以四旋翼飞行器编队避险飞行为主题,通过Matlab仿真进行技术分析,探讨相关算法和方法的实现。
-
引言
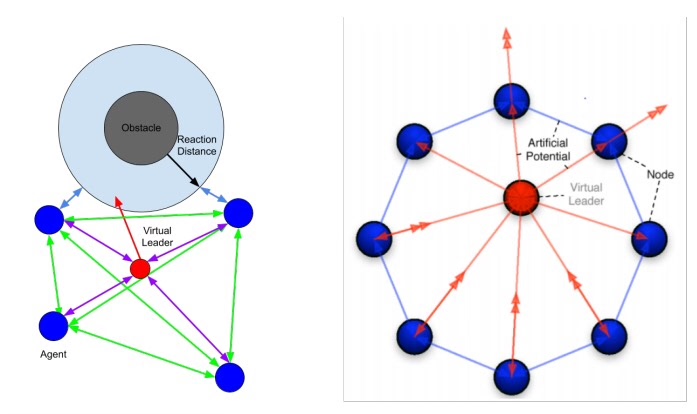
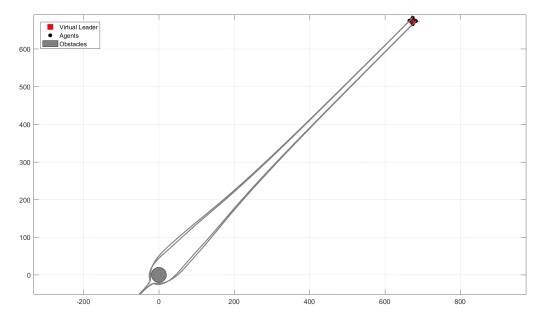
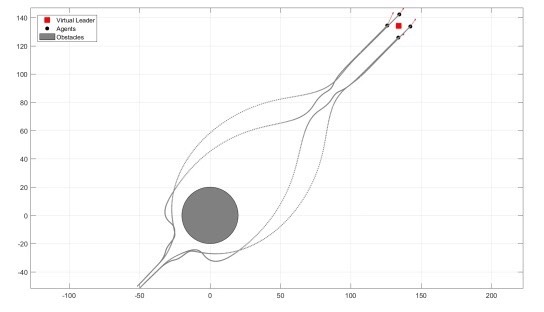
四旋翼飞行器编队避险飞行是指多个四旋翼飞行器在飞行过程中,通过相互协作和避免碰撞,保持一定的空间关系和队形。这对于无人机编队应用具有重要意义,可以用于航拍、搜索救援等领域。 -
四旋翼飞行器编队控制
编队控制是四旋翼飞行器编队避险飞行的基础。首先,我们需要设计合适的控制策略,使得四旋翼飞行器能够根据编队任务要求进行位置和姿态控制。这其中包括姿态控制、位置控制以及编队队形的控制。
2.1 姿态控制
姿态控制旨在使四旋翼飞行器保持稳定的飞行状态,包括横滚、俯仰和偏航角的控制。我们可以利用传感器数据和控制算法来实现四旋翼飞行器的姿态控制,例如使用PID控制器。
2.2 位置控制
位置
【相关代码,程序地址】:http://fansik.cn/717015209079.html
















 1653
1653

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









