







硬件STM32F407,IDE使用RT-Thread Studio。
uart2串口使用这两个引脚:
| 功能 | IO端口 |
|---|---|
| UART2-TX | PA2 |
| UART2-RX | PA3 |
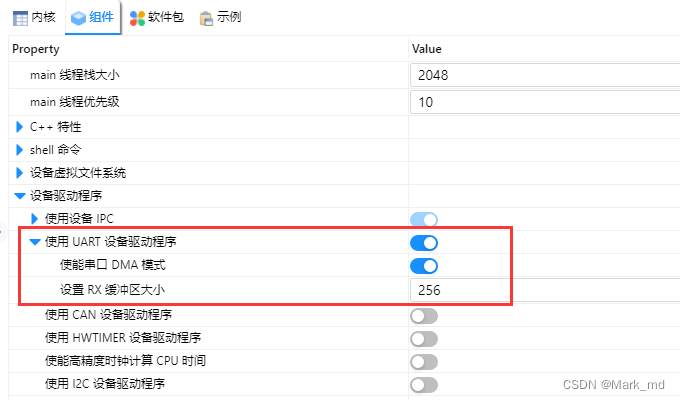
UART2 - DMA接收配置
-
先使能DMA接收,RX缓冲区可以稍微调大些。
-
board.h 中添加宏,来使能 RX_DMA。
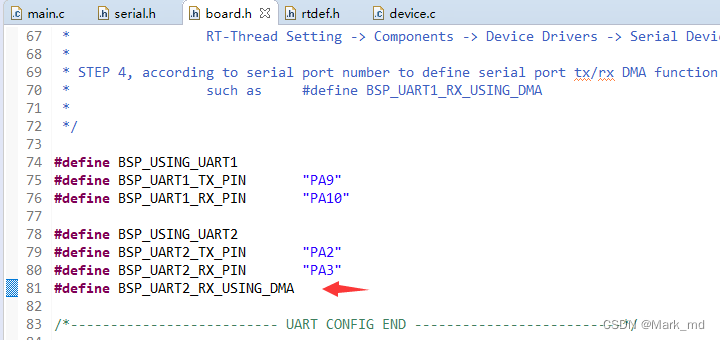
-
既然都打开了 board.h,再顺便把时钟源改为外部晶振。
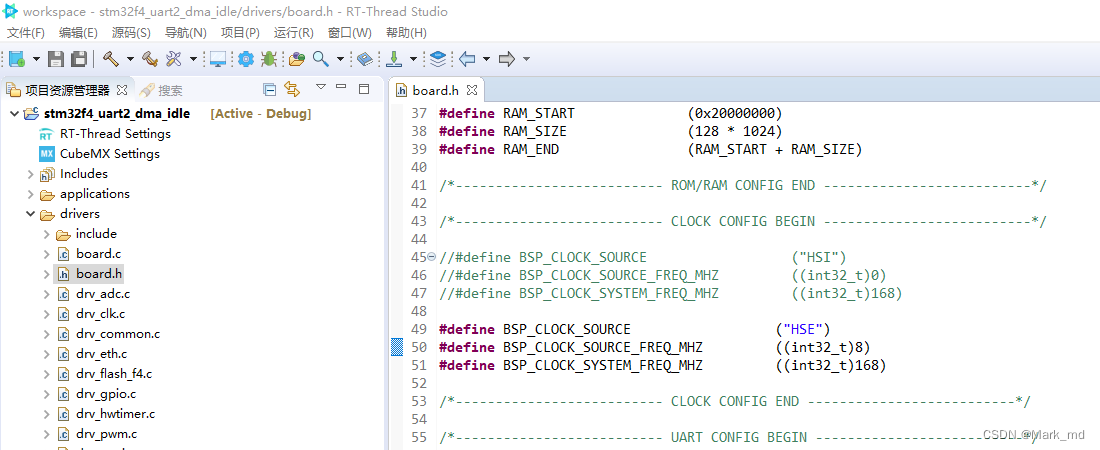
-
编写 UART2 DMA 接收测试代码。
-
发生接收事件后,会触发回调。回调内记录本次接收的消息长度,并发送信号量。线程内接收到信号量后开始执行后续的任务,调试输出接收到的长度和内容。
main.c
#include <rtthread.h>
#define DBG_TAG "main"
#define DBG_LVL DBG_LOG
#include <rtdbg.h>
#include "drivers/serial.h"
rt_device_t u2_dev = RT_NULL;
struct serial_configure u2_cfg = RT_SERIAL_CONFIG_DEFAULT;
struct rt_semaphore u2_rx_sem;
rt_thread_t u2_recv_thread;
rt_size_t u2_rx_len = 0;
rt_err_t u2_rx_callback(rt_device_t dev, rt_size_t size)
{
u2_rx_len = size; // 记录消息长度
rt_sem_release(&u2_rx_sem);
return RT_EOK;
}
void u2_recv_entry(void *parameter)
{
char rx_buf[256];
rt_size_t len = 0;
while (1) {
rt_sem_take(&u2_rx_sem, RT_WAITING_FOREVER); // 等待信号量
len = rt_device_read(u2_dev, 0, rx_buf, u2_rx_len);
rx_buf[len] = '\0';
rt_kprintf("u2 recv: %d, %s\n", len, rx_buf);
}
}
int main(void)
{
rt_err_t err;
u2_dev = rt_device_find("uart2");
if (u2_dev == RT_NULL) {
LOG_E("uart2 rt_device_find failed");
return -EINVAL;
}
//rt_device_open(u2_dev, RT_DEVICE_FLAG_RDWR | RT_DEVICE_FLAG_INT_RX);
err = rt_device_open(u2_dev, RT_DEVICE_FLAG_DMA_RX);
if (err < 0) {
LOG_E("uart2 rt_device_open failed");
return err;
}
rt_device_control(u2_dev, RT_DEVICE_CTRL_CONFIG, (void *)&u2_cfg);
rt_device_set_rx_indicate(u2_dev, u2_rx_callback); // 设置接收回调函数
err = rt_sem_init(&u2_rx_sem, "u2_rx", 0, RT_IPC_FLAG_FIFO);
if (err < 0) {
LOG_E("uart2 rt_sem_init failed");
return err;
}
u2_recv_thread = rt_thread_create("u2_recv", u2_recv_entry, NULL, 1024*2, 8, 5); // 优先级8,时间片长度5
rt_thread_startup(u2_recv_thread);
rt_device_write(u2_dev, 0, "hello", 5);
return RT_EOK;
}
编译错误解决
-
编译后会提示缺少文件等错误。按如下更改。
-
改动RTT源码,添加缺少的头文件。
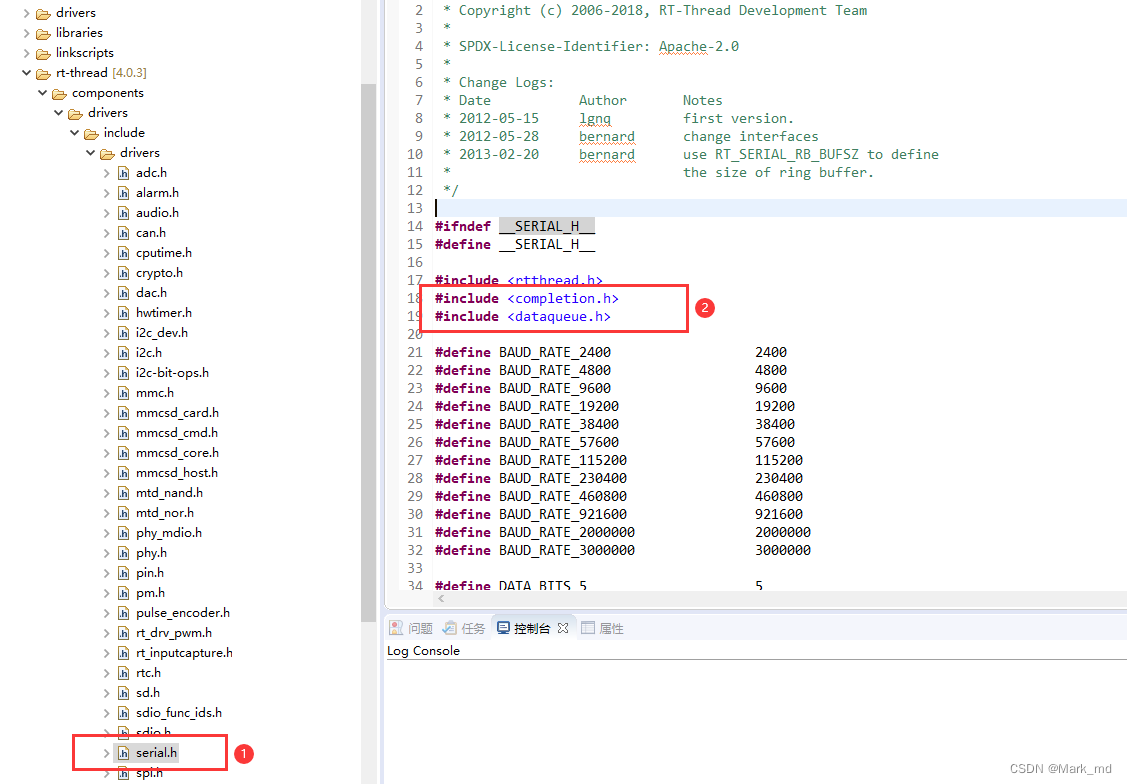
-
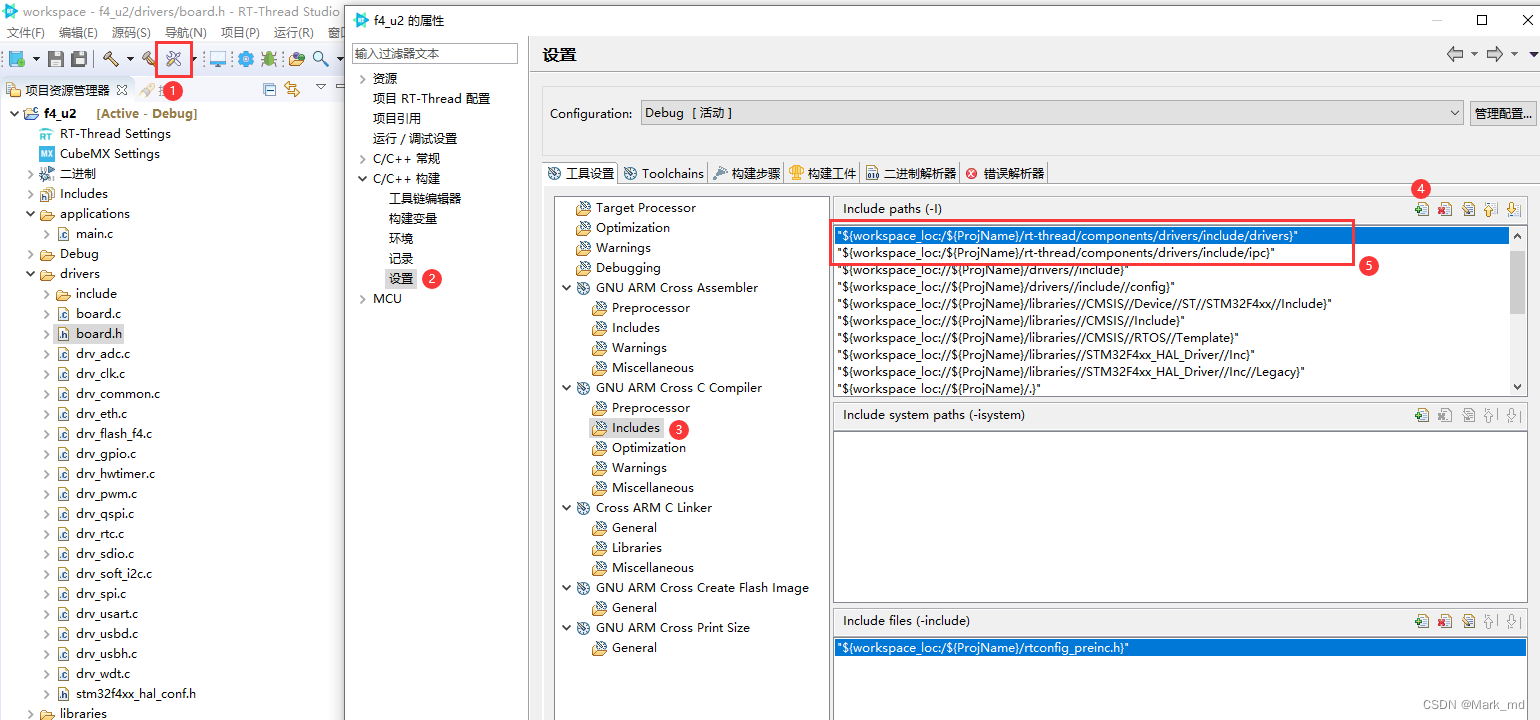
再配置交叉编译器include目录,增加如下:
"${workspace_loc:/${ProjName}/rt-thread/components/drivers/include/drivers}"
"${workspace_loc:/${ProjName}/rt-thread/components/drivers/include/ipc}"
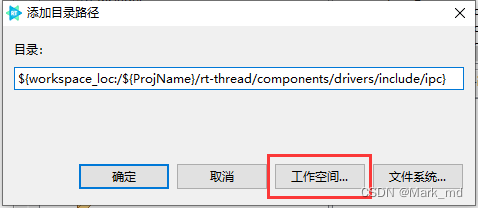
- 添加目录时请使用
工作空间,使用的是相对工程文件的路径。(文件系统指的是磁盘的绝对路径,复制工程又要重新配置)
运行测试RX DMA接收,解决断帧
-
接收正常,但当接收的一帧字节数较长时,非常容易出现断帧。
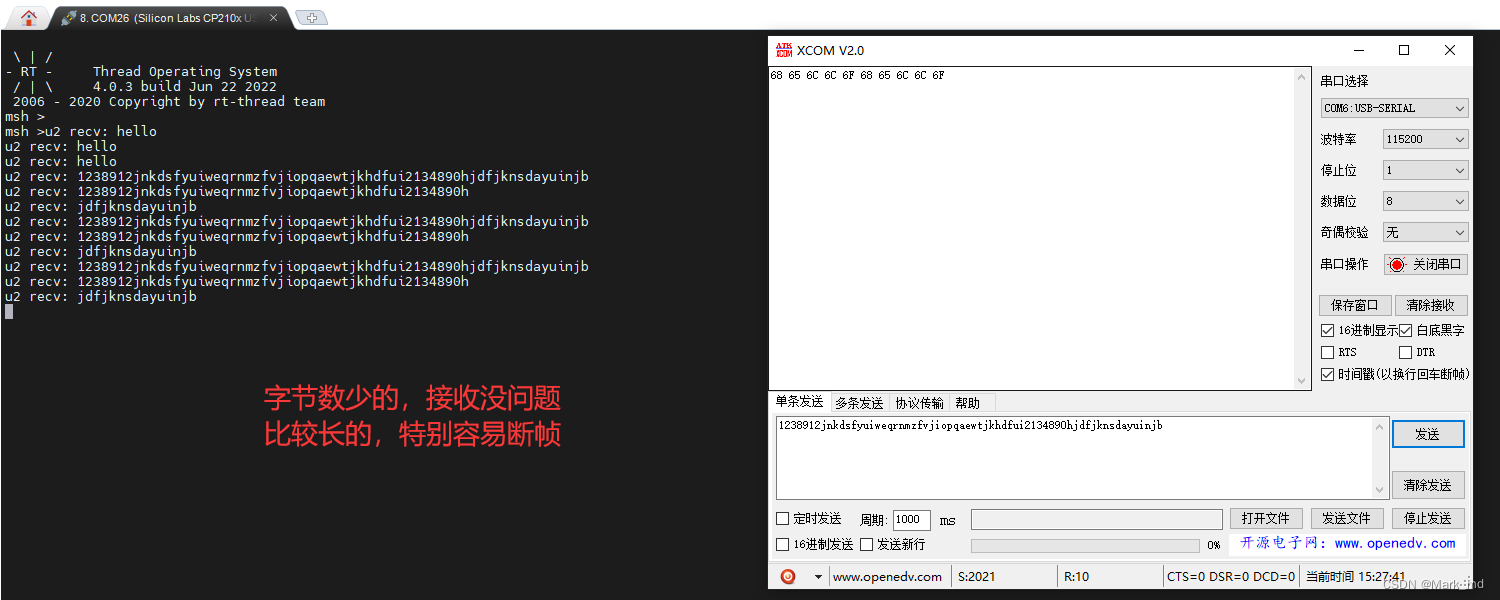
-
断帧的解决方法我参考这个,实测好用:
使用RT-Thread的串口空闲+DMA收发数据 -
找打 drv_usart.c,注释掉这两句。
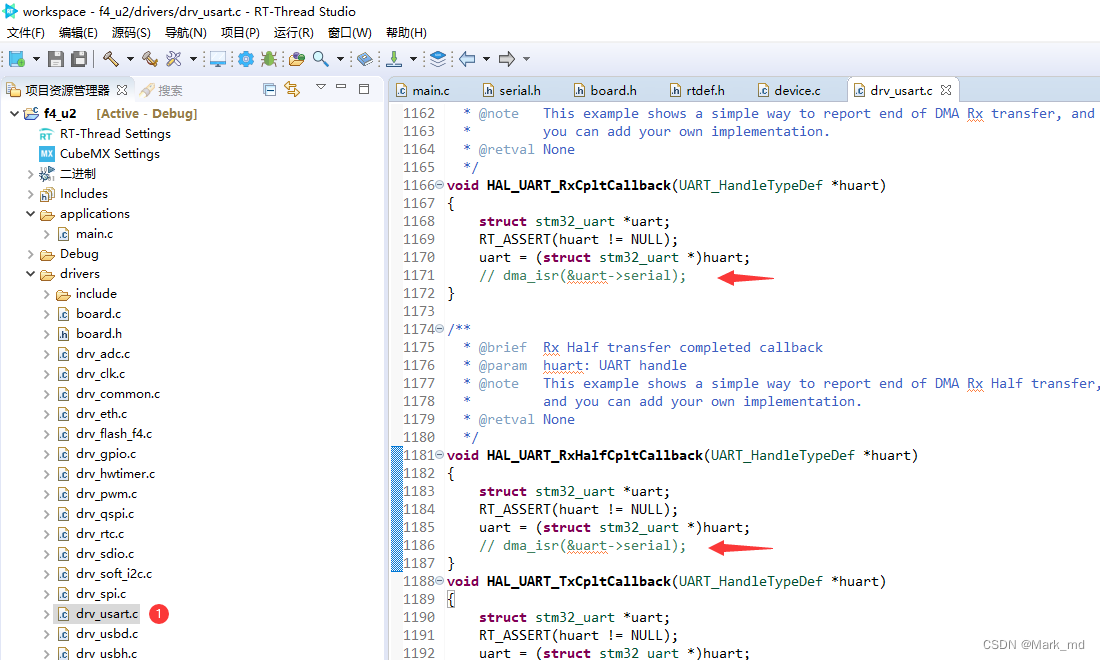
-
编译验证,确认经如上修改后就没有了断帧。
-
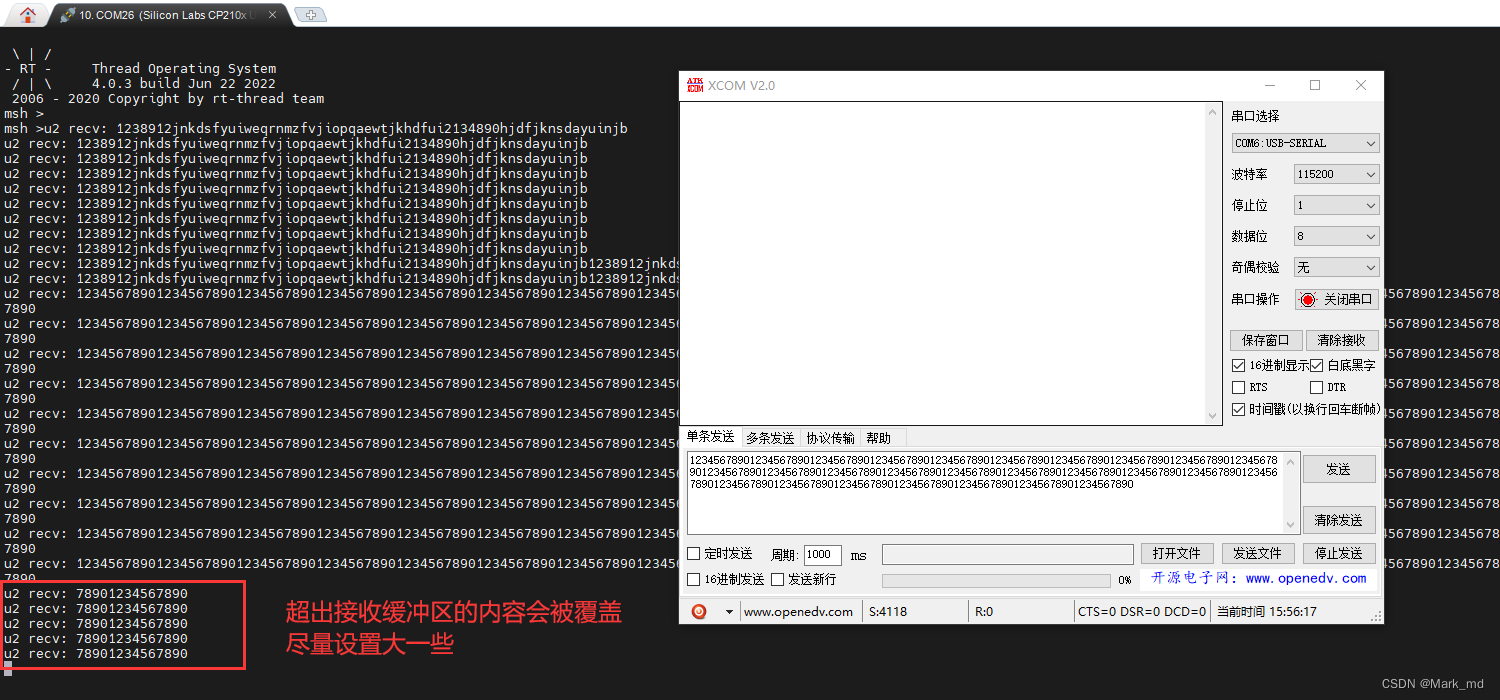
但当接收的一帧字节数大于缓冲区容量时,以前的内容会被覆盖。所以在硬件允许时,uart rx缓冲区可设置的大一些。
-
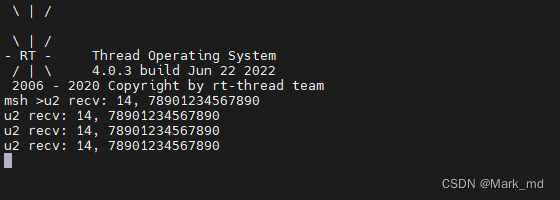
测试发送一帧270字节,当缓冲区容量为256字节时,仅提示收到14字节,前面的内容被覆盖。
关于RT-Thread的学习
- 官方应用实例、Demo:文档中心
- API文档:RT-Thread API参考手册
- IDE使用RT-Thread Studio,入门教程可以去B站看千峰教育的。
本来自己是没计划去学习 RT-Thread 的,但在MCU国产化替代进程中,发现大多数IC厂商提供的支持十分有限,可以说几乎都是在近几年内以STM32为蓝本进行的仿制,其中隐藏的雷坑单靠个人摸索去解决相当不推荐。再加之大多数原厂Demo是裸机的,很少有RTOS的。于是就想到了国产的 RT-Thread。
试用了 RT-Thread Studio 感觉相当好用,MCU的外设驱动不用用户操心,又有比较多的扩展组件可用,开发者可在熟悉RT-Thread的基础上,专注于应用的开发。其对国产MCU的支持正在逐步完善,暂时有 AT32、APM32、CH32、ES32、GD32、MM32 等,虽然只支持部分型号,但个人目前只中意AT32F403A,好巧不巧正好有它的芯片支持包。希望国产MCU能抓住替换潮机会,抓紧完善生态,不然等价格回落又会有一大批人转回STM32。望疫情早些过去,想念前三年芯片的价格。















 292
292

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









