






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
最短时间的区域覆盖和遥感是一种在遥感领域中应用的技术,旨在有效地利用遥感数据,以最短的时间内覆盖特定区域。该技术通常涉及遥感平台(如卫星、飞机或地面传感器)的路径规划和数据采集安排。通过优化传感器的轨道、观测角度和时间安排,以尽可能减少时间和资源成本,同时确保获取到高质量的遥感数据。总的来说,最短时间的区域覆盖和遥感是一种利用遥感技术和优化算法,以最短时间内获取特定区域遥感数据的方法。它在各种应用场景中都有广泛的应用前景,有助于提高遥感数据的获取效率和利用价值。
📚2 运行结果
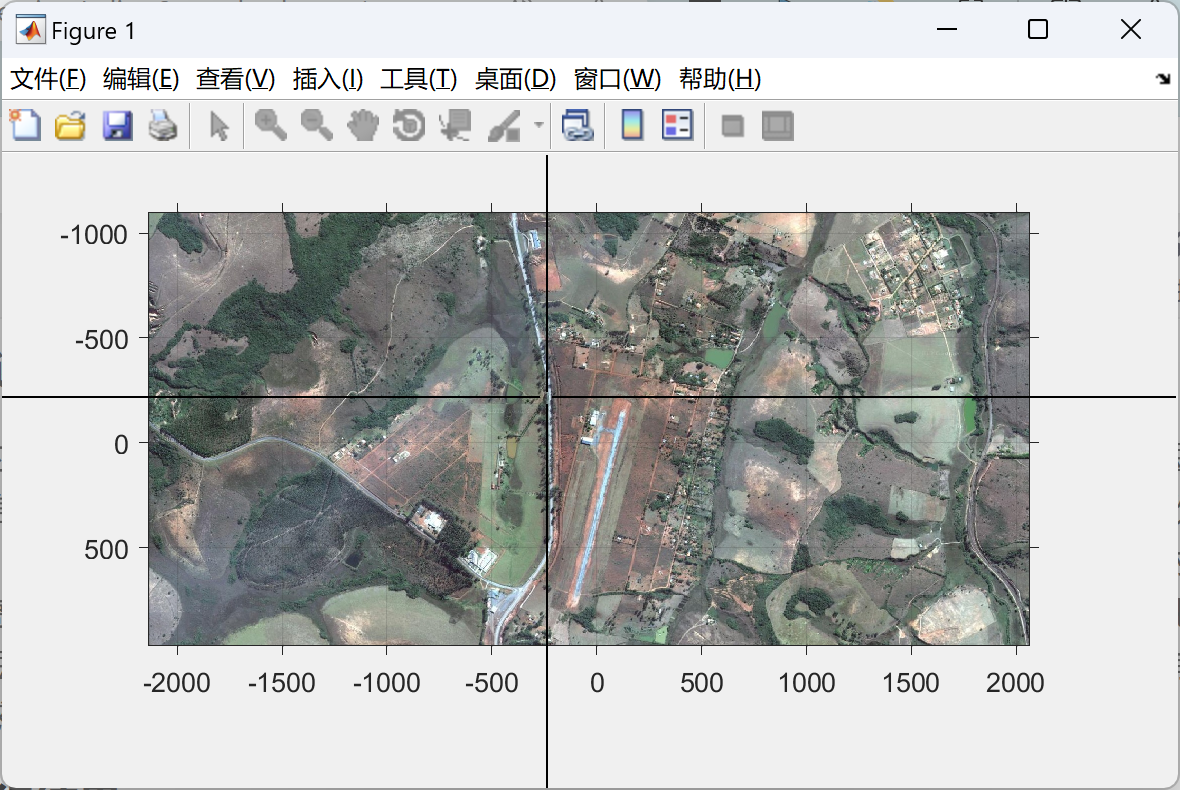
主函数部分代码:
close all
clear
% clc
%% Configurations
% UAV
global O
global uavNumber;
global uavSetupTime;
global uavFlightTime;
O = 1; % Operadores
uavNumber = 2;
uavSetupTime = 4; % m閐ia de 8.2 minutos de setup
uavFlightTime = 30;
uavSpeed = 45;
%flightAltitude = 240;
%flightAltitude = 210;
flightAltitude = 180;
% Heur韘tica 0: N鉶
% 1: Sim
h = 0;
% Camera specs
horizontalResolution = 4608;
verticalResolution = 3456;
% FOV t韕ico de 35 mm
% 18mm h: 100 v: 66;
% 28mm h: 74 v: 49;
% 35mm h: 62 v: 41;
hfieldOfView = 74;
vfieldOfView = 49;
sidelap = .5; % image overlap
%% Parameters
imageWidth = flightAltitude*2*tan(pi*(hfieldOfView/2)/180);
imageLength = flightAltitude*2*tan(pi*(vfieldOfView/2)/180);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]梁喜幸,戴志军,黄鹄,等.基于无人机航测的红树林潮滩地貌高程反演[J/OL].海洋科学进展:1-16[2024-03-29].http://kns.cnki.net/kcms/detail/37.1387.P.20240326.1700.002.html.
[2]武锦龙,吴虹麒,李浩,等.基于改进DeepLabV3+的荞麦苗期无人机遥感图像分割研究[J/OL].农业机械学报:1-12[2024-03-29].http://kns.cnki.net/kcms/detail/11.1964.S.20240328.0844.002.html.















 1057
1057











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









