






适用方向:基于LQR控制算法的直接横摆力矩控制(DYC)的四轮独立电驱动汽车的横向稳定性控制研究
主要内容:利用carsim建模,在simulink中搭建控制器,然后进行联合。
实现汽车在高速低附着路面下完成双移线工况的仿真。
可以与PID控制和无控制车辆进行对比,从而验证所设计LQR控制器的稳定性和有效性。
模型包含:纵向驾驶员模型、电机模型、车辆二自由度参考模型、LQR控制器等。
ID:21130745040887335
灰色格调
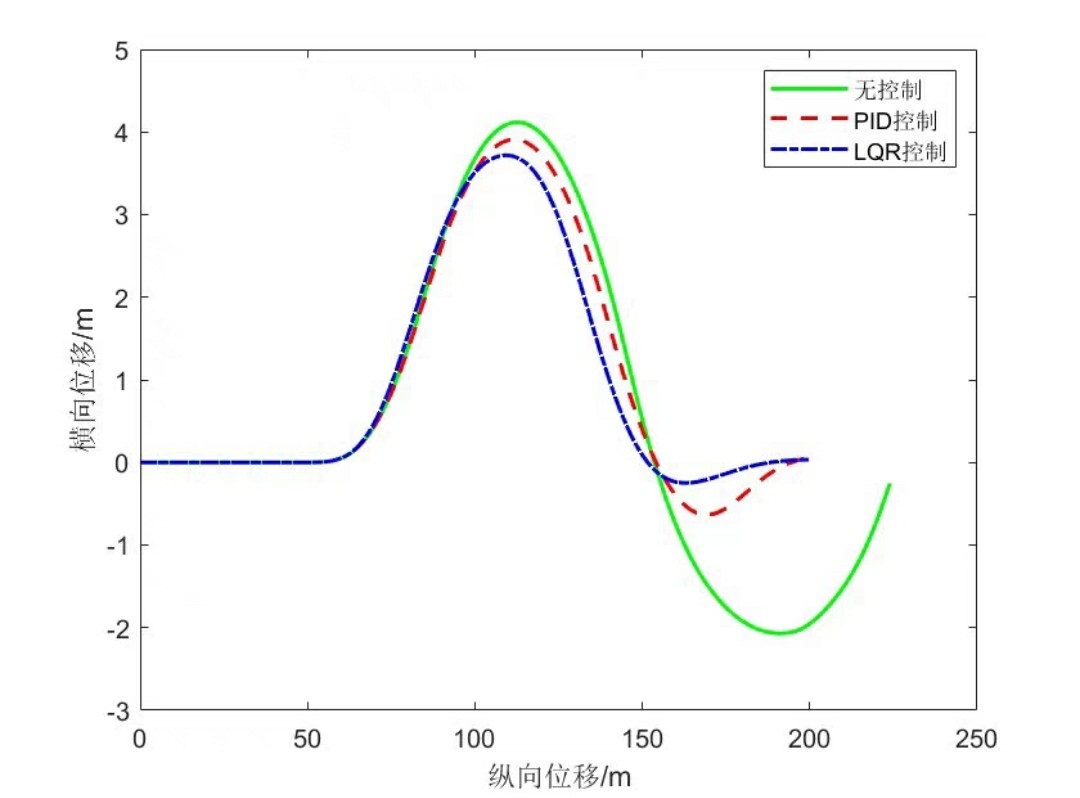
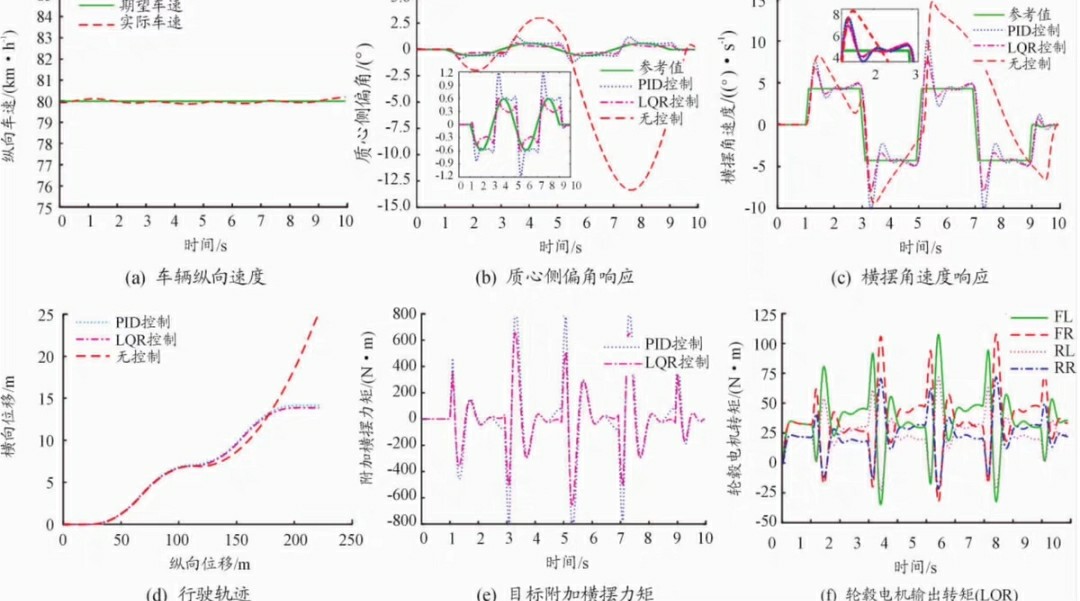
基于LQR控制算法的直接横摆力矩控制(DYC)是一种用于四轮独立电驱动汽车横向稳定性控制的研究方向。本文将通过利用Carsim进行建模,并在Simulink中搭建控制器,联合进行仿真,以实现汽车在高速低附着路面下完成双移线工况的仿真。
在探讨LQR控制器的稳定性和有效性前,我们首先需要对模型进行建立。模型的关键组成部分包括纵向驾驶员模型、电机模型、车辆二自由度参考模型以及LQR控制器等。
首先,纵向驾驶员模型是对驾驶员行为进行建模的一种方法。通过模拟驾驶员的加速度和刹车操作,我们可以准确地模拟出驾驶员的控制策略,使模型更接近实际驾驶场景。
其次,电机模型是在电驱动汽车中不可或缺的一部分。通过建立电机模型,我们可以准确地模拟出电机的输出特性,包括扭矩和转速等参数。这使得我们可以更好地控制车辆的动力系统,从而提高车辆的横向稳定性。
车辆二自由度参考模型是一种常用的汽车控制模型,用于描述车辆的运动状态和行驶特性。该模型考虑了车辆的横向运动和纵向运动,并将它们作为控制系统的参考指标。基于这个模型,我们可以设计出符合需求的LQR控制器,从而实现对车辆横向稳定性的控制。
最后,LQR控制器是基于线性二次调节(LQR)理论设计的一种控制器。它通过最小化系统的性能指标,如状态变量的加权和,来实现对车辆横向稳定性的控制。通过与PID控制器和无控制车辆进行比较,我们可以验证所设计的LQR控制器在高速低附着路面下的稳定性和有效性。
在实际应用中,我们可以通过Carsim进行建模,并在Simulink中搭建控制器。通过将这两个工具进行联合仿真,我们可以得到汽车在高速低附着路面下完成双移线工况的仿真结果。通过对比不同控制策略下的仿真结果,我们可以评估所设计的LQR控制器的性能,并验证其在实际场景中的稳定性和有效性。
综上所述,基于LQR控制算法的直接横摆力矩控制(DYC)是一种用于四轮独立电驱动汽车横向稳定性控制的研究方向。本文通过利用Carsim进行建模,并在Simulink中搭建控制器,联合进行仿真,以实现汽车在高速低附着路面下完成双移线工况的仿真。通过对比不同控制策略下的仿真结果,我们可以验证所设计的LQR控制器的稳定性和有效性。这一研究对于提升电驱动汽车的横向稳定性具有重要的理论和实践意义。
以上相关代码,程序地址:http://wekup.cn/745040887335.html















 5629
5629

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









