






——记北京理工大学自动化学院多智能体协同控制平台项目
(转载自新华网)蓄势数载业初就 | 多智能体协同控制科学研究一瞥
近年来,无人机编队逐步走进大众视野,经常在一些重大会议或活动上给大家带来一场场视觉盛宴。多架无人机编队技术在科研中被称为“多智能体协同控制”,这种技术并不只应用于表演性质的无人机编队,更是可以应用于工业操作、巡逻侦察、灾情救援、环境勘探、智能物流、智能农业,和消费娱乐等方面。
北京理工大学自动化学院的院长夏元清作为学科带头人,带领复杂系统智能控制与决策国家重点实验室—“空地协同控制组”,在长达6年的不断探索和改进中,摸索出一套网络化多智能体空地协同控制实验平台。
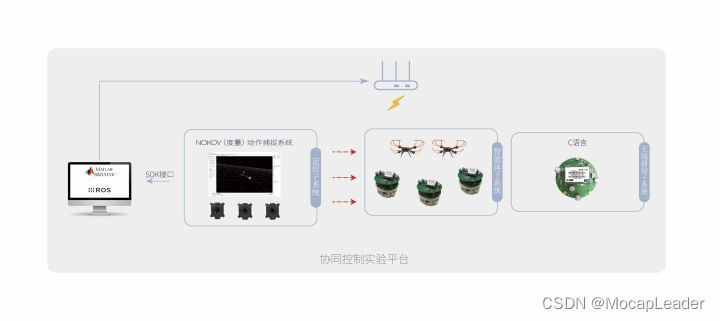
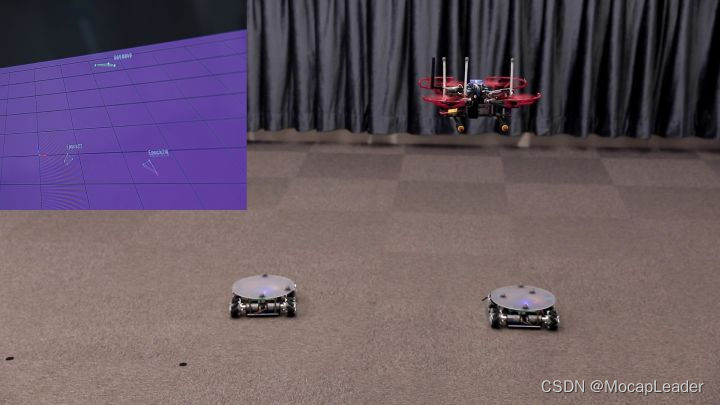
多智能体协同控制平台可以为高校实验室提供同构和异构智能体的控制算法验证,为理论成果提供实验支撑。这个平台主要由定位系统、通讯系统以及控制决策系统组成。为了解决定位系统精度和实时性的问题,平台采用了NOKOV度量光学三维动作捕捉系统。NOKOV度量光学三维动作捕捉系统的精度可以达到亚毫米,延迟也在两三个毫秒内,能够很好地满足实时定位并将位姿信息通过无线WiFi 通信传输给各个智能体,从而实现各个智能体的定位。明确了智能体的位置之后,每个智能体身上的智能控制决策系统可以对多智能体的行动作出控制,从而实现整套系统的协同控制。
更多阅读:
协同控制 空间定位 | NOKOV度量动作捕捉NOKOV度量动作捕捉用于多智能体的天地一体化网络协同控制![]() https://www.nokov.com/motion-capture-cooperative-control.html经典案例 | NOKOV度量动作捕捉经典案例
https://www.nokov.com/motion-capture-cooperative-control.html经典案例 | NOKOV度量动作捕捉经典案例![]() https://www.nokov.com/support/case_studies/5.html#case-list-1
https://www.nokov.com/support/case_studies/5.html#case-list-1















 6367
6367











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









