






 本文通过MatlabR2018a的Simulink平台,构建了一种基于输入整形的双惯量伺服系统,研究了如何利用输入整形器抑制低频机械谐振引起的末端抖动。文中详细介绍了模型结构、三种输入整形器的应用以及仿真结果,为伺服系统性能优化提供了参考。
本文通过MatlabR2018a的Simulink平台,构建了一种基于输入整形的双惯量伺服系统,研究了如何利用输入整形器抑制低频机械谐振引起的末端抖动。文中详细介绍了模型结构、三种输入整形器的应用以及仿真结果,为伺服系统性能优化提供了参考。
基于输入整形的双惯量系统末端抖动低频机械谐振抑制仿真
1.模型简介
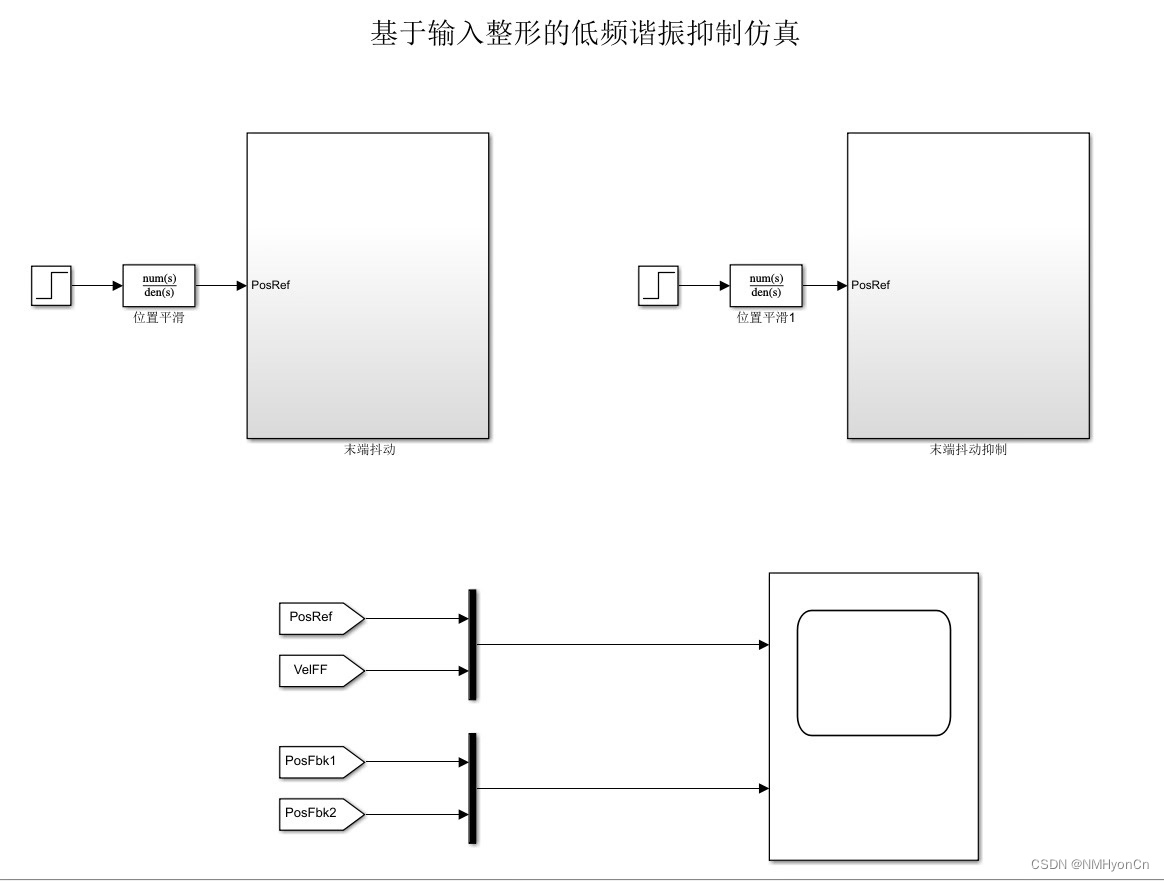
模型为基于输入整形的双惯量伺服系统低频机械谐振抑制(末端抖动抑制)仿真,采用Matlab R2018a Simulink搭建。
仿真模型由传递函数形式搭建,主要包括输入整形器、位置环、转速环、低通滤波器、双惯量谐振模型。
2.算法简介
实际工程中,由于传动环节机械间隙和柔性的影响,高速运动的伺服电机在定位时负载末端会存在残余抖动,这将加大系统的定位时间,影响伺服系统性能。
谐振抑制一直为伺服控制算法中最核心的算法之一。
本仿真中采用了3种输入整形器,适合理论分析和仿真验证,便于理解机械谐振原理、输入整形原理以及谐振抑制原理。
仿真内可手动设置谐振频率,根据设定频率自动设定机械参数,并且输入整形器的参数容易设定。
3.仿真效果
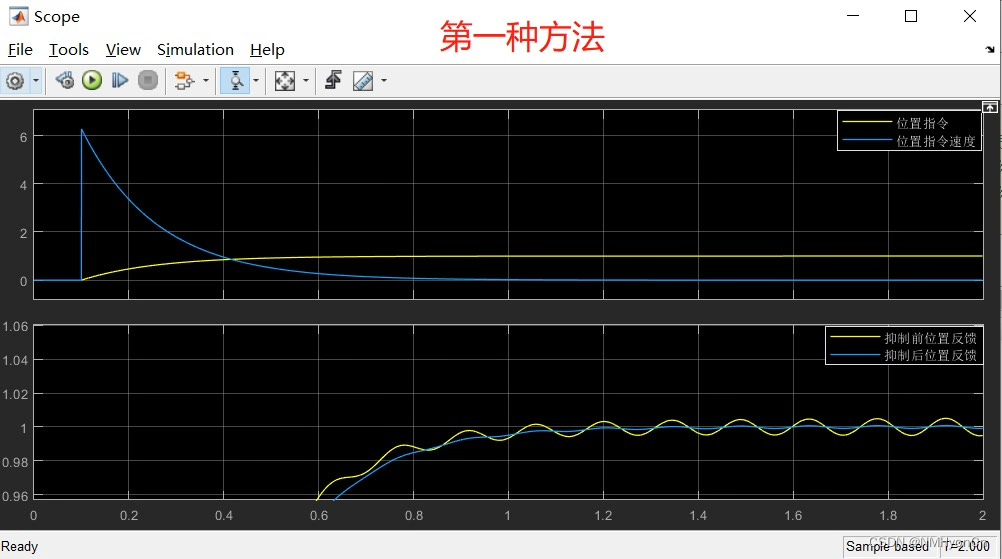
1??低频机械谐振-末端抖动,输入整形器1抑制效果如下图1所示。
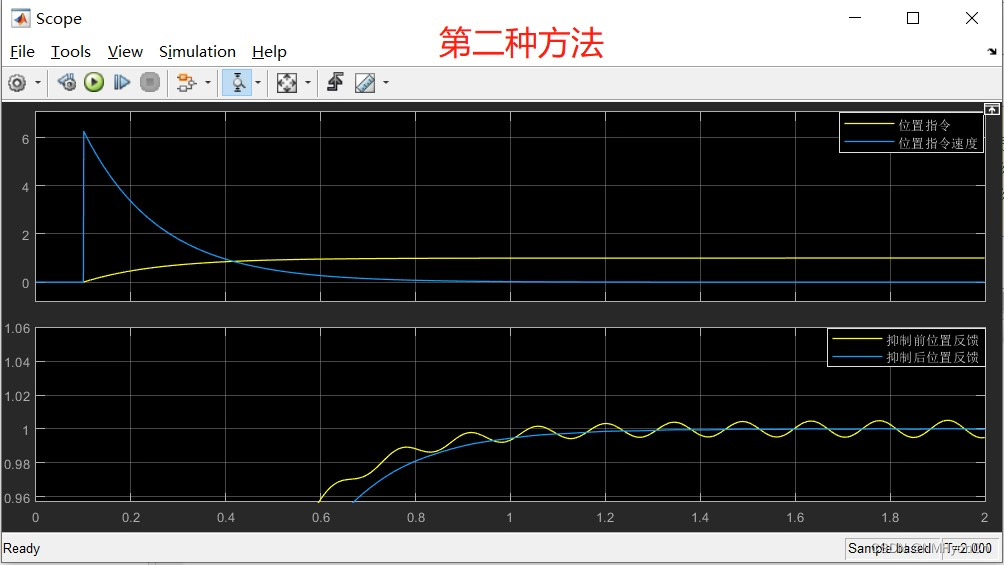
2??低频机械谐振-末端抖动,输入整形器2抑制效果如下图2所示。
3??低频机械谐振-末端抖动,输入整形器3抑制效果如下图3所示。
4.
可提供模型内相关算法的参考文献,避免大量阅读文献浪费时间。
可针对模型内的相关技术问题进行,并给出指导意见。
【注】 模型已搭建完毕,原则上不会做任何修改。

基于输入整形的双惯量系统末端抖动低频机械谐振抑制仿真
-
模型简介 本文的仿真模型是基于输入整形的双惯量伺服系统低频机械谐振抑制(末端抖动抑制)仿真,采用Matlab R2018a Simulink进行搭建。该仿真模型主要由输入整形器、位置环、转速环、低通滤波器和双惯量谐振模型组成,通过传递函数的形式来建立。
-
算法简介 在实际工程中,由于传动环节机械间隙和柔性的影响,高速运动的伺服电机在定位时负载末端会存在残余抖动,这会加大系统的定位时间,从而影响伺服系统的性能。因此,谐振抑制一直是伺服控制算法中最重要的算法之一。
在本仿真中,我们采用了三种输入整形器,旨在适合理论分析和仿真验证,并便于理解机械谐振的原理、输入整形的原理以及谐振抑制的原理。同时,仿真内还提供了手动设置谐振频率的功能,根据设定的频率自动设定机械参数,并且输入整形器的参数也可以很容易地设置。
-
仿真效果 本文分别对三种输入整形器进行了示例仿真,并展示了不同输入整形器下的低频机械谐振-末端抖动的抑制效果,具体如下: 1)低频机械谐振-末端抖动,输入整形器1的抑制效果如图1所示。 2)低频机械谐振-末端抖动,输入整形器2的抑制效果如图2所示。 3)低频机械谐振-末端抖动,输入整形器3的抑制效果如图3所示。
-
参考文献和技术问题 为了避免读者浪费大量时间阅读相关文献,本文提供了模型内相关算法的参考文献,以供读者参考。此外,本文还可针对模型内的相关技术问题进行探讨,并给出相应的指导意见。
通过以上的介绍,我们可以看到本文通过建立基于输入整形的双惯量系统的仿真模型,展示了针对低频机械谐振-末端抖动的抑制效果。同时,本文还提供了多种输入整形器的选择,并详细介绍了各输入整形器的原理和仿真效果。希望本文能够对读者在研究和应用伺服系统中的机械谐振抑制算法有所启发,并提供一些有价值的参考和指导。
相关代码,程序地址:http://imgcs.cn/lanzoun/704756268403.html


















 812
812

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









