






基于CODESYS开发的多轴运动控制程序框架将逻辑和运动控制分开,通过封装单轴控制功能块来操作该功能块,包括归零、点动、相对定位、绝对定位、设置当前位置、伺服模式切换等功能。程序框架由主程序按照状态调用,包括归零模式、手动模式、自动模式和故障模式。程序状态的跳转已经完成,只需要根据具体的工艺要求执行所需的动作。变量的声明和地址规划严格按照C++的标准定义,可以帮助开发者快速完成多轴运动控制程序的开发。
基于CODESYS开发的多轴运动控制程序框架是一种高效、强大的运动控制程序解决方案。该框架将逻辑和运动控制分开,通过封装单轴控制功能块来实现多轴运动控制。
在该框架中,单轴控制功能块包括归零、点动、相对定位、绝对定位、设置当前位置、伺服模式切换等功能。这些功能块的封装可以使开发者在开发多轴运动控制程序时更加高效、方便地完成各种操作。
程序框架由主程序按照状态调用,包括归零模式、手动模式、自动模式和故障模式。程序状态的跳转已经完成,只需要根据具体的工艺要求执行所需的动作。这种状态管理的方式非常灵活,可以根据具体情况定制不同的状态转换规则。
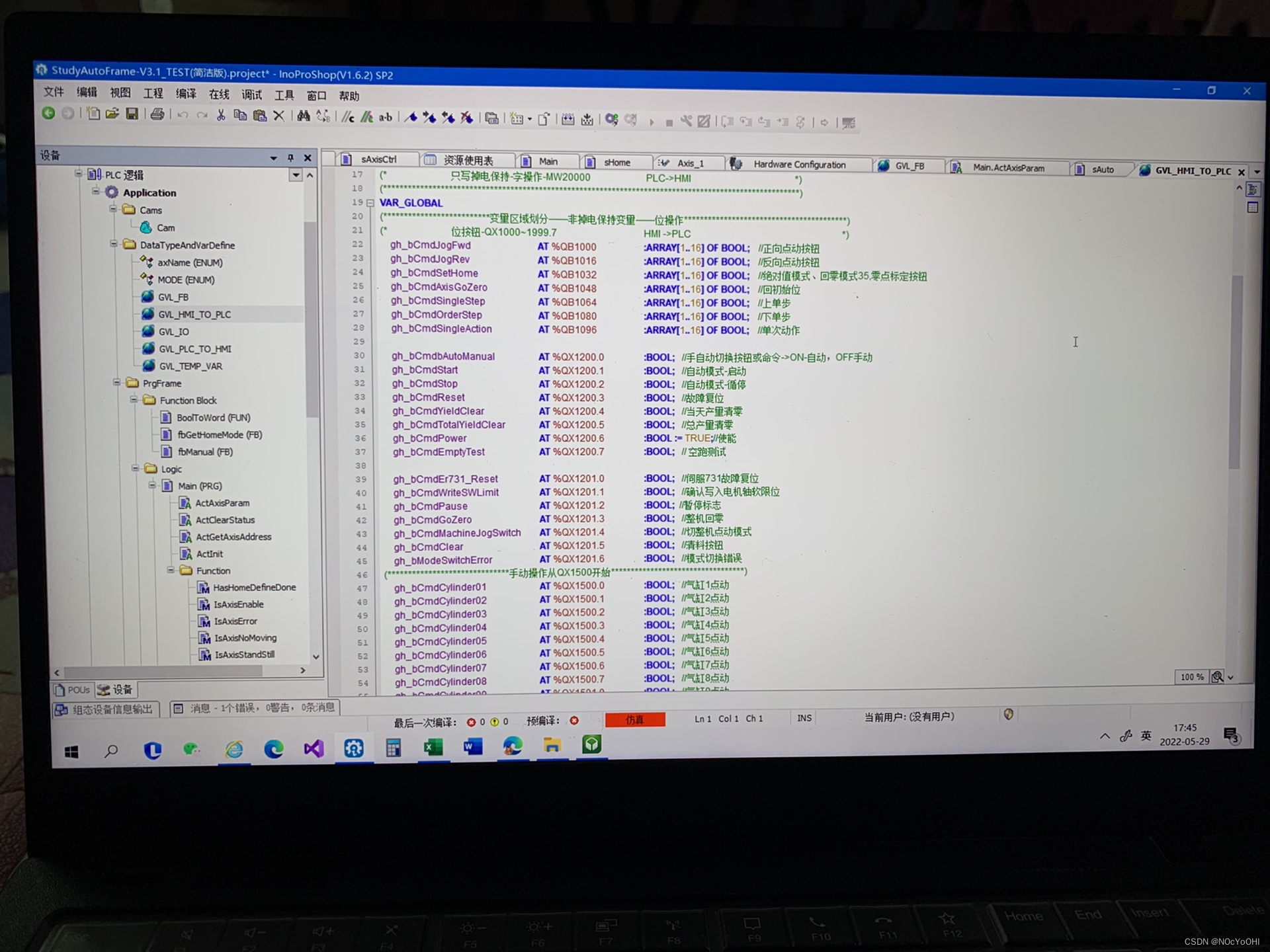
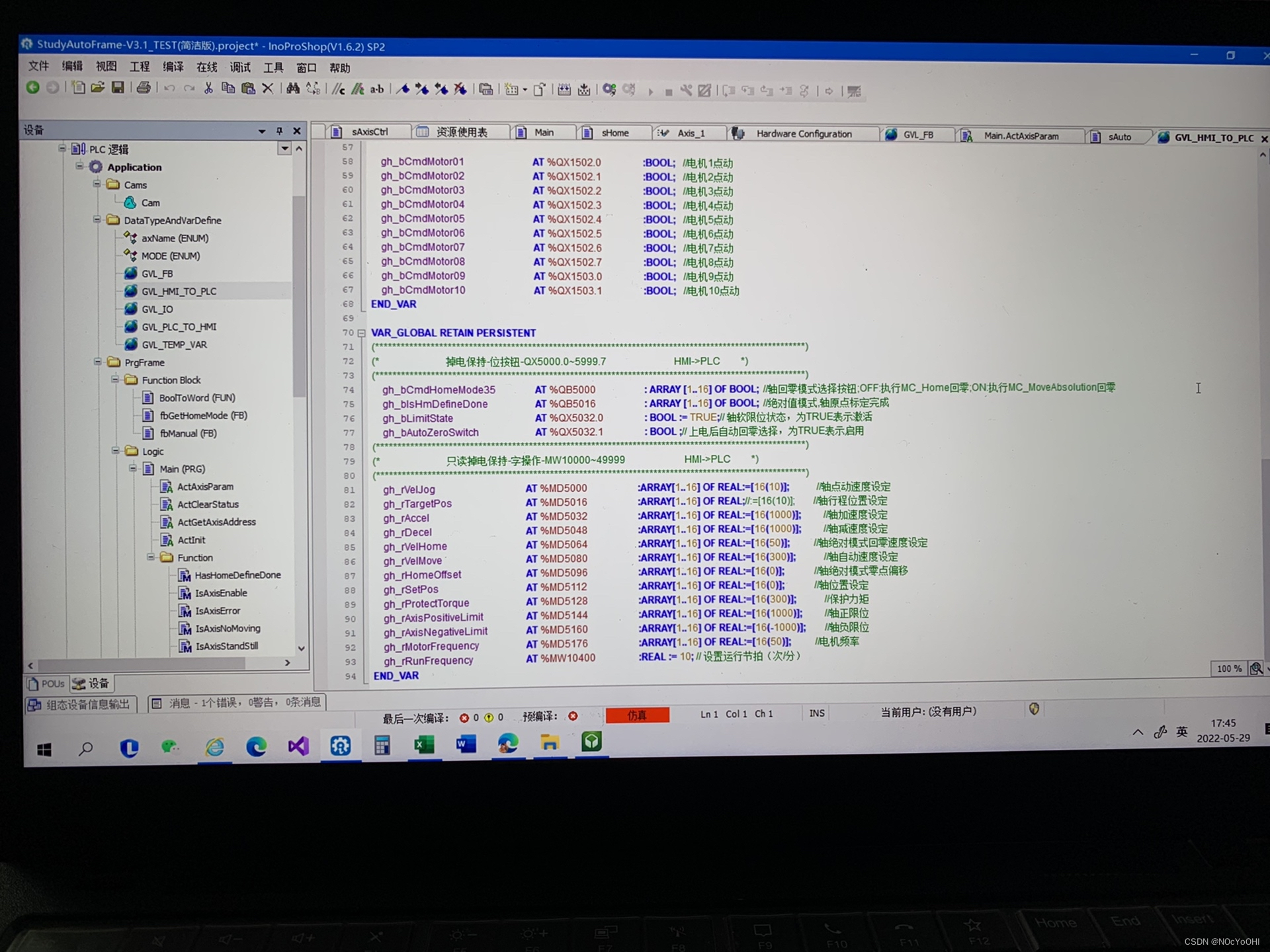
变量的声明和地址规划严格按照C++的标准定义,这使得开发者可以方便地在程序中使用各种C++语言特性,如继承、多态等。这也使得程序的可读性和可维护性都得到了提高。
在实际应用中,基于CODESYS开发的多轴运动控制程序框架已经得到了广泛的应用。在机床、印刷机、木工机械等领域,该框架已经成为了重要的运动控制程序解决方案。
总之,基于CODESYS开发的多轴运动控制程序框架是一种高效、灵活、可维护的运动控制程序解决方案,可以帮助开发者快速完成多轴运动控制程序的开发。在未来,该框架还有很大的应用前景,有望成为运动控制领域的重要发展方向。
相关代码,程序地址:http://lanzouw.top/675163440298.html















 845
845











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









