







目录
3、删除这个speech引用,重新引用这个speech包(每个人的环境不一样,可能是其他引用包有问题)
4、编译成功初次编译成功的效果,因为每个人的电脑开发环境不同,编译的结果也不同,但是首先保证windows 10 SDK,.NETFramework 4.6.2这些组件一定要在你的编译器里面存在。
基于Mavlink的上位机地面站开发教程
第一节 开发环境搭建
桌面上位机的开发用微软的C#平台,是最容易上手的,C#网上资料很多,各种优秀控件直接用。我在最开始接触飞控开发,就是通过C#来做的地面站。然后慢慢入手的飞控开发。最好有些C语音的基础,然后C#的基础。C#比较简单,网上的视频教程也比较多。如果没有C#基础请看如下的视频教程,花2周时间好好学学。开源代码下载地址 https://github.com/diydrones/MissionPlanner。操作系统要求 1.3.50(包含1.3.50)之后版本系统必须升级到win10,1.3.50之前也就是1.3.4X,Win7就可以了,附件里的1.3.50修改版 去掉了对.net standard 的支持,只保留了对.net Framwork支持开发IDE Visual Studio Community 2017(win7先安装.net 4.6)+SSCERuntime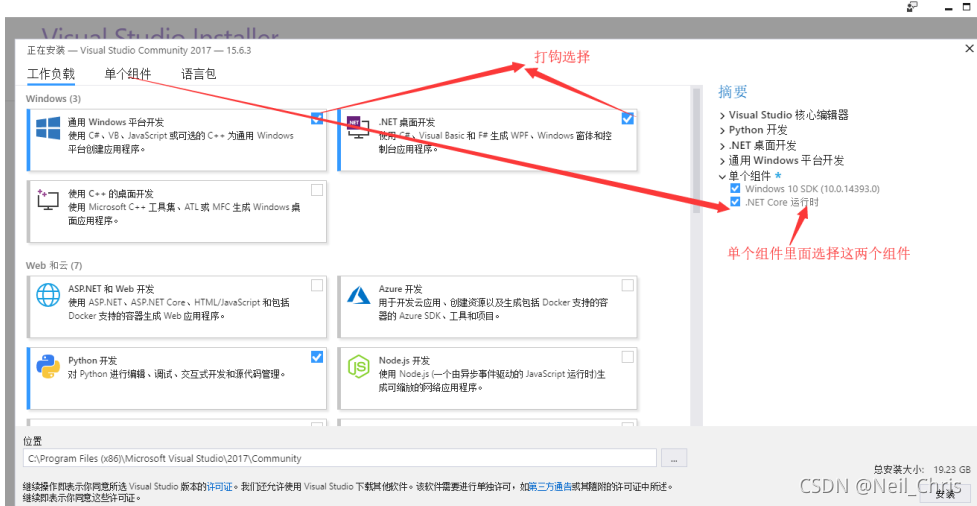

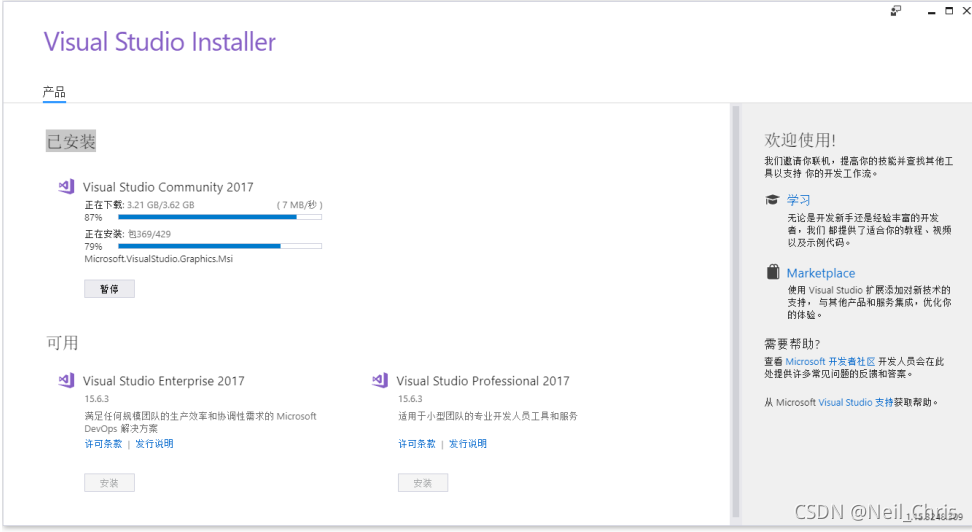
静静的等待安装完成,因为比较大,安装的时间也比较久。尽量采用我们的这个安装环境和下载对应的组件,要不然只用我们的源码去在你个人电脑上编译,会有各种各样的问题。下载源码 我们采用1.49的版本进行编译https://github.com/ArduPilot/MissionPlanner/releases/tag/MissionPlanner1.3.49 MP的作者在1.50以后的代码不支持win 7,所以我们考虑到编译的便捷和支持更广泛,我们考虑采用1.49为版本做为讲解和开发。并且作者是打算 让MP支持ubuntu,所以编译起来也会有很多问题。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 5万+
5万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











