







对称矩阵:矩阵上的所有元素关于主对角线对称,满足 A = A T A = A^{T} A=AT
I = [ 1 0 0 1 ] A = [ 1 − 1 5 − 1 2 π 5 p i 3 ] I = \begin{bmatrix} 1&0 \\ 0&1\end{bmatrix} \ \ \ \ \ \ \ \ \ \ A= \begin{bmatrix} 1&-1&\sqrt {5} \\ -1&2&\pi \\ \sqrt {5}&pi&3 \end{bmatrix} I=[1001] A= 1−15−12pi5π3
对称矩阵的重要性质
- 对于对称矩阵来说,其特征值一定是实数;
- 尽管对称矩阵也会存在多重特征值,但是其对应的特征空间(所有的特征向量生成矩阵的特征空间)的维度一定等于重数;
- 一个 n n n阶的对称矩阵一定具有 n n n个线性无关的特征向量;
- 从而对称矩阵一定可以被对角化 A = P D P − 1 A = PDP^{-1} A=PDP−1。
正交对角化
我们在选择参考坐标系的时候,通常更愿意愿意使用基于正交基生成的坐标系,更方便理解和使用
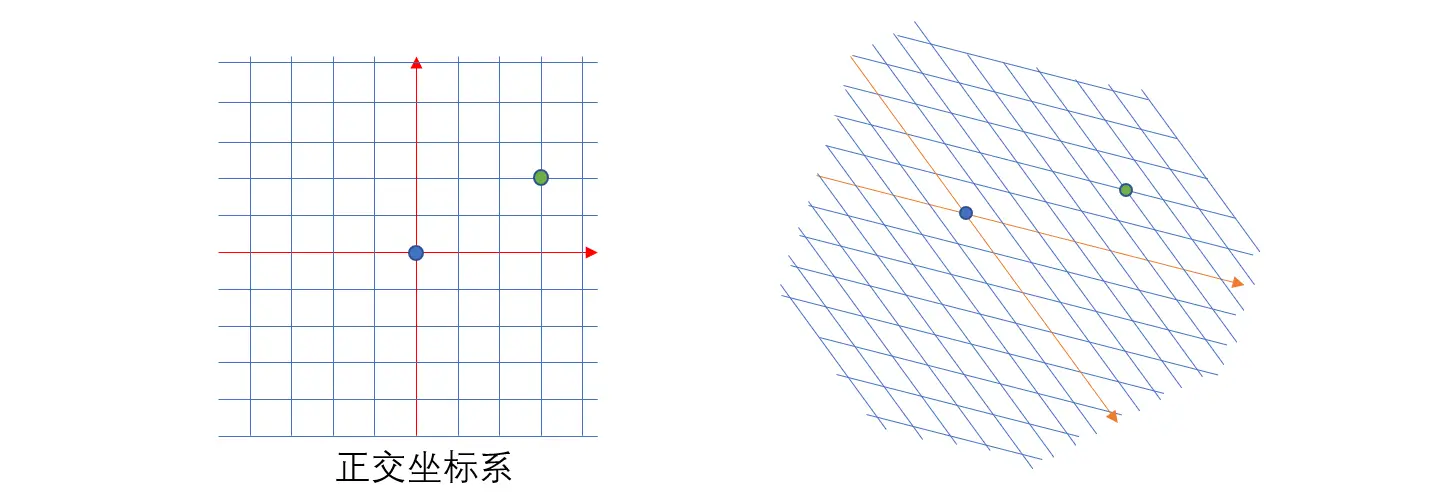
而对称矩阵的所有不同特征值对应的特征向量就具有互相垂直的特点,从而能够在对角化分解后得到一个代表正交坐标系的 P P P矩阵。
假设矩阵
A
A
A的两个特征向量
v
⃗
1
,
v
⃗
2
\vec v_1 ,\vec v_2
v1,v2对应不同的特征值
λ
1
,
λ
2
\lambda _1 , \lambda _2
λ1,λ2;
则可证:
v
⃗
1
v
⃗
2
=
0
\vec v_1 \vec v_2 =0
v1v2=0
∵
λ
1
v
⃗
1
v
⃗
2
=
(
λ
1
v
⃗
1
)
T
v
⃗
2
=
(
A
v
⃗
1
)
T
v
⃗
2
=
v
⃗
1
T
A
T
v
⃗
2
\, \, \, \, \, \, \,\because \lambda _1 \vec v_1 \vec v_2 = (\lambda _1 \vec v_1)^{T} \vec v_2= (A \vec v_1)^{T} \vec v_2 = \vec v_1^{T}A^{T} \vec v_2
∵λ1v1v2=(λ1v1)Tv2=(Av1)Tv2=v1TATv2
∵
A
\, \, \, \, \, \, \,\because A
∵A是对称矩阵,
A
T
=
A
A^{T} = A
AT=A,
v
⃗
1
T
A
T
v
⃗
2
=
v
⃗
1
T
A
v
⃗
2
=
v
⃗
1
T
λ
2
v
⃗
2
=
λ
2
v
⃗
1
T
v
⃗
2
\vec v_1^{T}A^{T} \vec v_2 = \vec v_1^{T}A \vec v_2 = \vec v_1^{T}\lambda_2 \vec v_2 = \lambda_2\vec v_1^{T} \vec v_2
v1TATv2=v1TAv2=v1Tλ2v2=λ2v1Tv2
∴
λ
1
v
⃗
1
v
⃗
2
=
λ
2
v
⃗
1
T
v
⃗
2
=
λ
2
v
⃗
1
v
⃗
2
\, \, \, \, \, \, \,\therefore \lambda_1\vec v_1 \vec v_2=\lambda_2\vec v_1^{T} \vec v_2 = \lambda_2\vec v_1 \vec v_2
∴λ1v1v2=λ2v1Tv2=λ2v1v2
∴
(
λ
1
−
λ
2
)
(
v
⃗
1
v
⃗
2
)
=
0
\, \, \, \, \, \, \,\therefore (\lambda _1 - \lambda _2)(\vec v_1\vec v_2) = 0
∴(λ1−λ2)(v1v2)=0
∵
λ
1
≠
λ
2
\, \, \, \, \, \, \,\because \lambda _1 \neq \lambda _2
∵λ1=λ2
∴
v
⃗
1
v
⃗
2
=
0
\, \, \, \, \, \, \,\therefore \vec v_1\vec v_2 = 0
∴v1v2=0
而对于对称矩阵的相同特征值情况,也一定可以在它的特征空间内找到互相垂直的特征向量,从而构成正交的 P P P矩阵。
在将矩阵进行对角化的过程
A
=
P
D
P
−
1
A = PDP^{-1}
A=PDP−1中,矩阵
P
P
P的作用仅代表一个坐标系,在
P
P
P坐标系下观察
A
A
A变换具有
D
D
D的表现形式,而对于一个坐标系,我们仅关注生成空间的基向量的方向,所以可以将其替换成一个标准坐标系,也即将基向量的模变为1(向量标准化),这样就可以得到一个标准正交矩阵
Q
Q
Q。标准正交矩阵
Q
Q
Q具有
Q
T
=
Q
−
1
Q^{T} = Q^{-1}
QT=Q−1的性质。
从而对矩阵
A
A
A的正交对角化可表示为:
A
=
Q
D
Q
−
1
=
Q
D
Q
T
A = QDQ^{-1} = QDQ^{T}
A=QDQ−1=QDQT
如果一个矩阵
A
A
A可以被正交对角化,
就有
A
=
Q
D
Q
T
A = QDQ^{T}
A=QDQT,
而
A
T
=
(
Q
D
Q
T
)
T
=
(
Q
T
)
T
D
T
Q
T
=
Q
D
Q
T
=
A
A^{T} =( QDQ^{T})^{T} = (Q^T)^{T}D^TQ^T = Q D Q^T = A
AT=(QDQT)T=(QT)TDTQT=QDQT=A;
从而
A
A
A是对称矩阵
⇔
A
\Leftrightarrow A
⇔A 可以被正交对角化
A
=
Q
D
Q
T
A = QDQ^{T}
A=QDQT 【谱定理】



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











