







蓝色
紫色
红色
写在前面:本篇Blog仅作为学习笔记,学习内容来自于北邮CV-XUEBA团队的三维重建(精简版,鲁鹏)课程。
两种典型的基于图像的三维重建方法
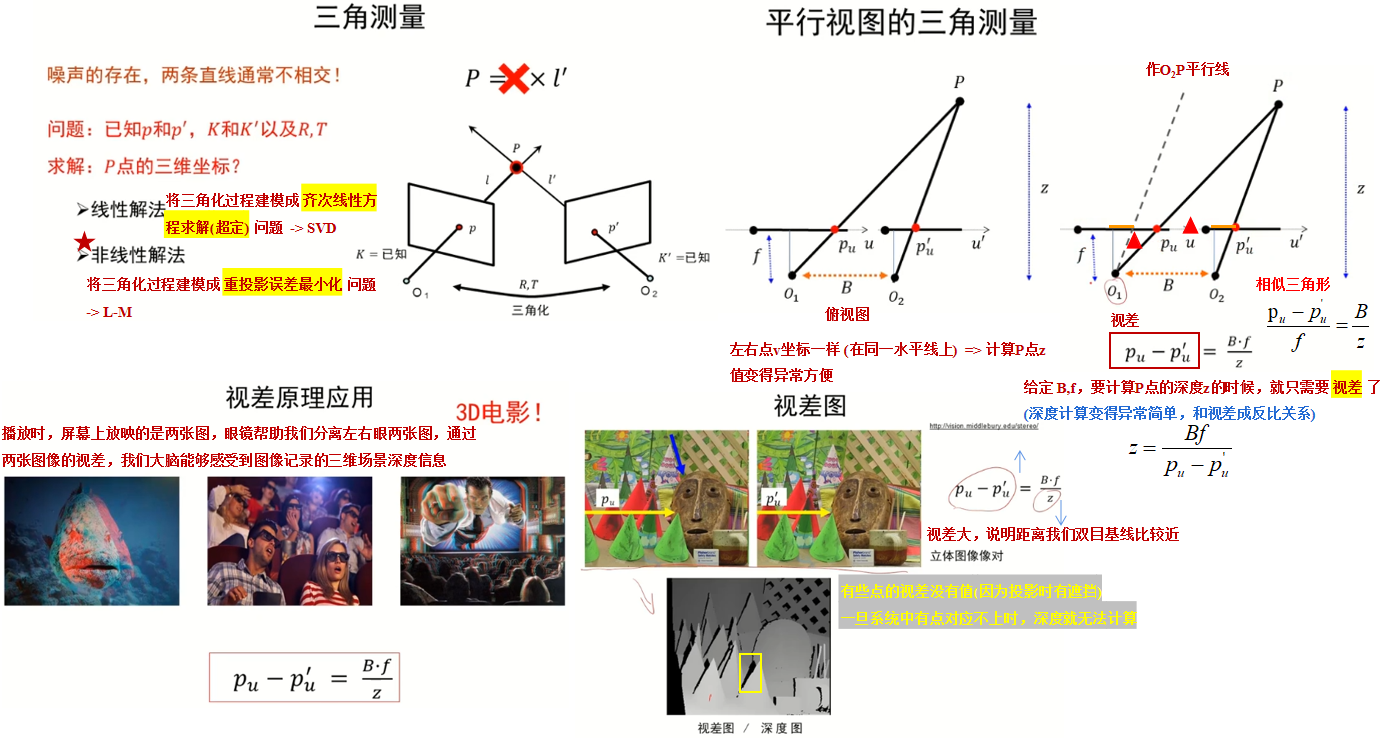
1. 基于平行视图的三维重构方法
利用 两个视点 来观察物体,采用和人类视觉系统类似的方法进行重构三维场景。
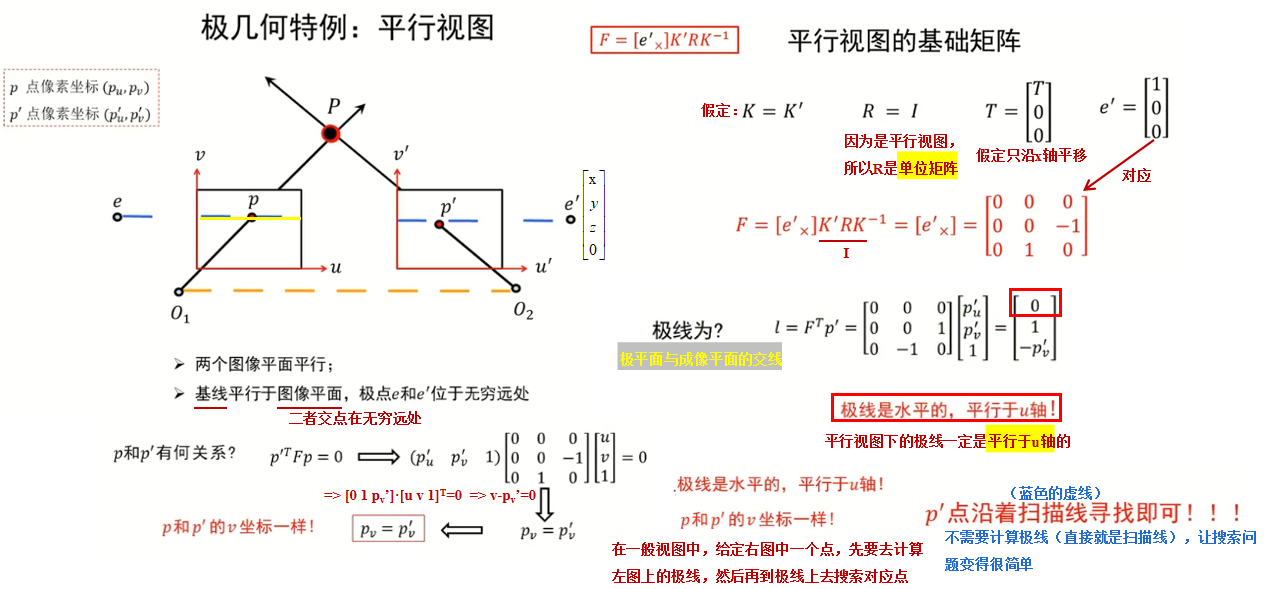
平行视图
平行视图下的一些 极几何性质 :
平行视图的优势:
- 不需要计算极线 就可以直接寻找对应点,使得搜索相对简单。
- 让整个场景的 三角化过程 变得很简单。
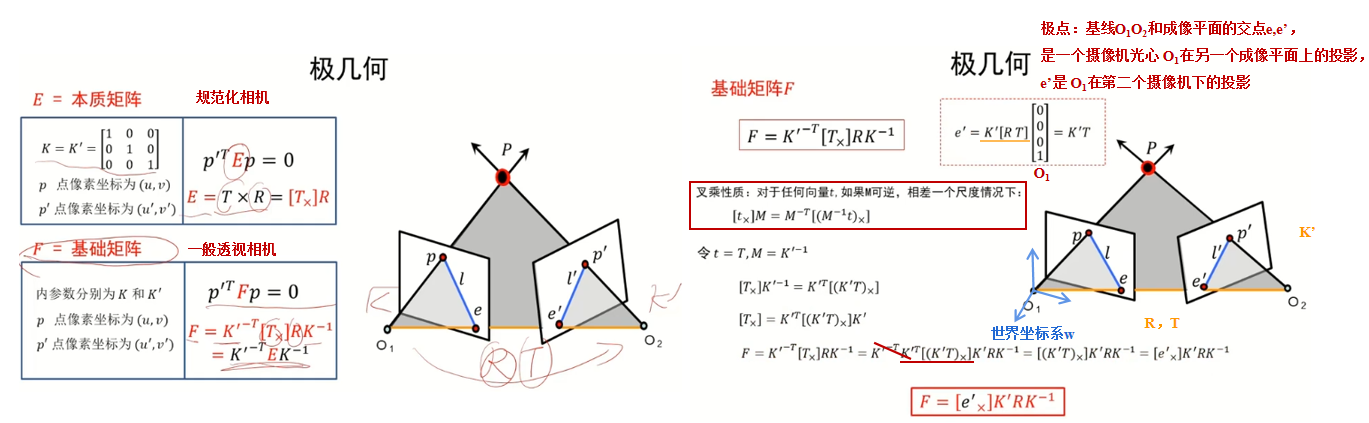
高维向量求取叉乘矩阵
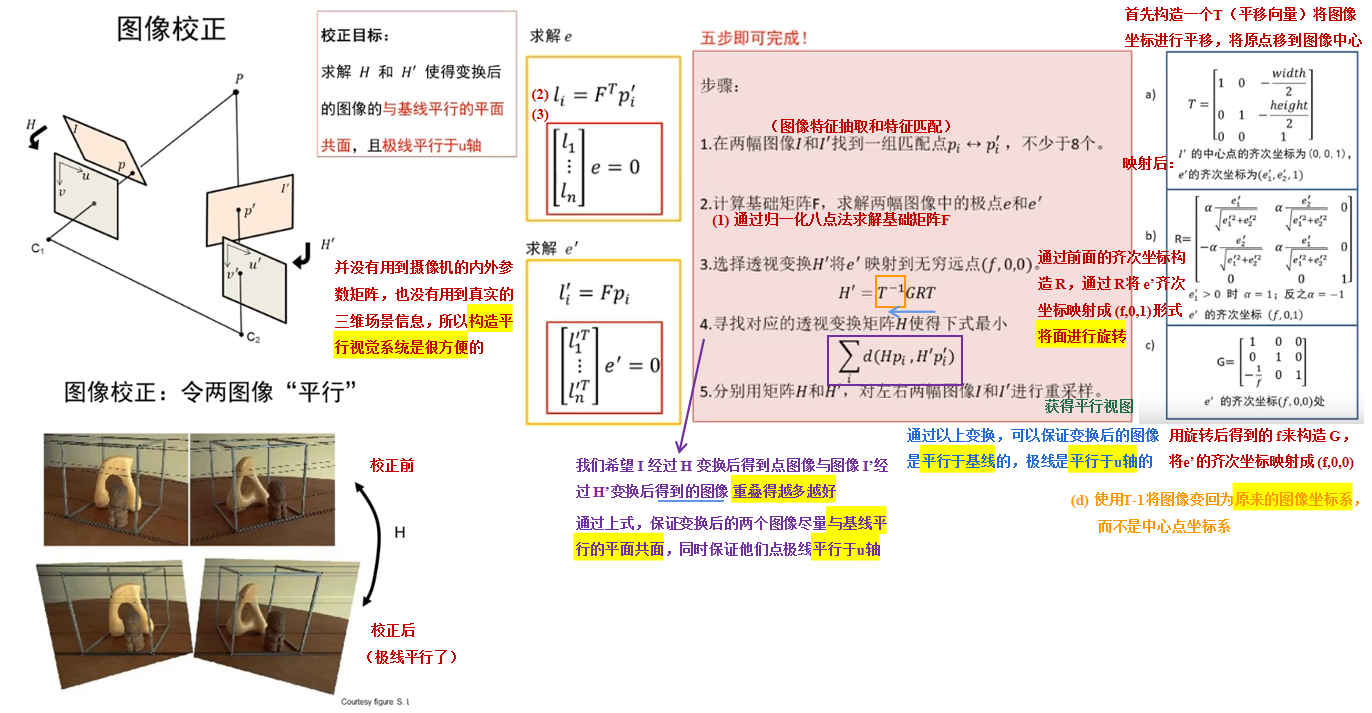
图像校正
一般情况下,我们构建的双目立体视觉系统通常 很难得到真正的 平行视图,所以需要图像校正来将 非平行视图 转换成 等价的平行视图 。
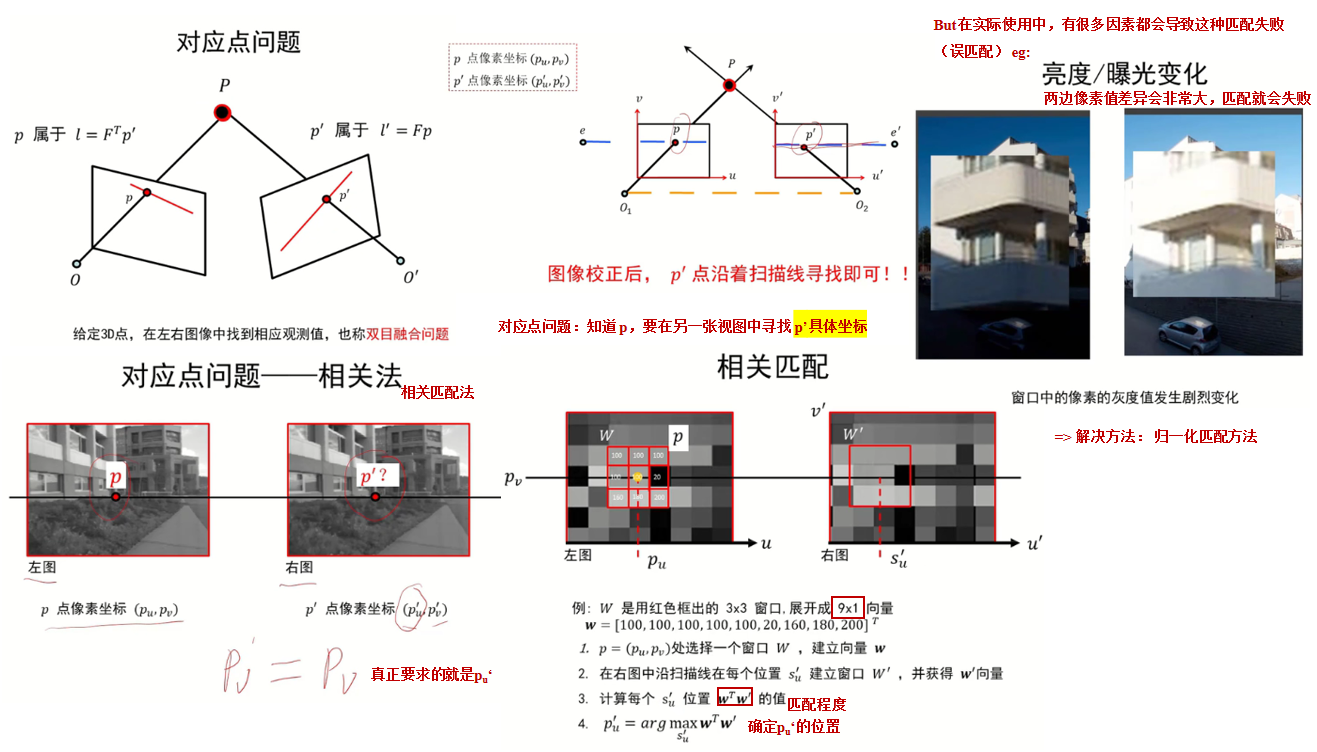
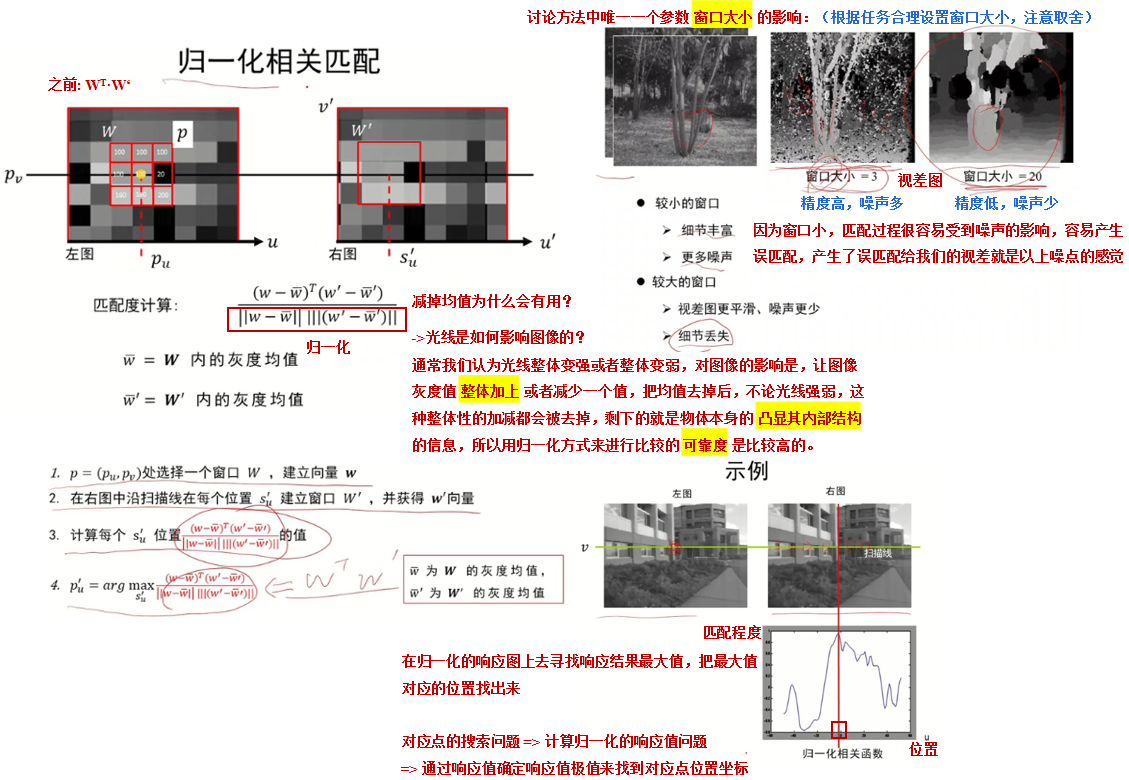
对应点搜索
相关匹配法
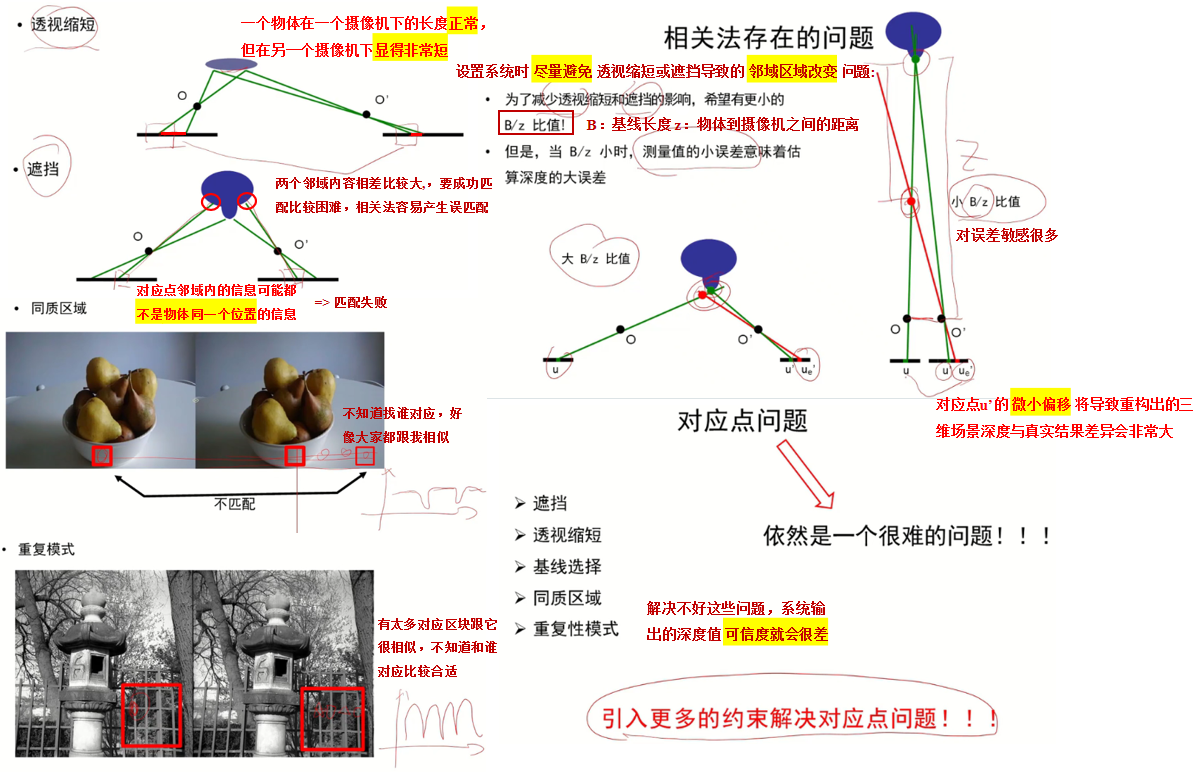
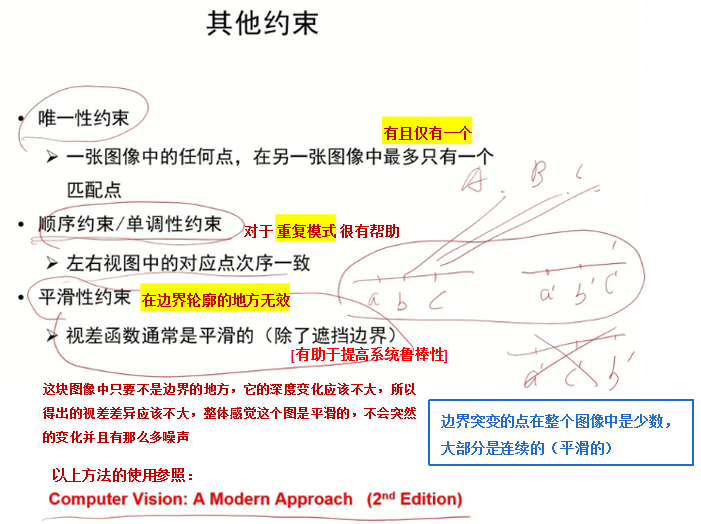
相关法存在的问题
2. 运动恢复结构法
运动恢复结构问题概述
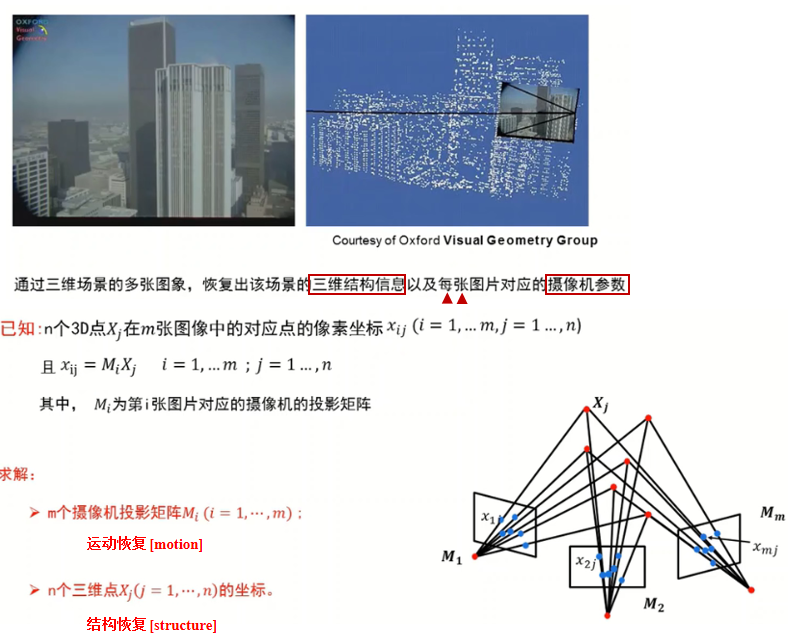
欧式结构恢复 (摄像机内参数已知,外参数未知)
该任务对应的典型场景:扫地机器人、无人驾驶车
(在出厂前就可以对摄像机进行标定,在真实场景中应用的时候,可以使用这些 预先标定好的内参数 ,然后进行所在三维场景的恢复,进而支持下一步的决策)
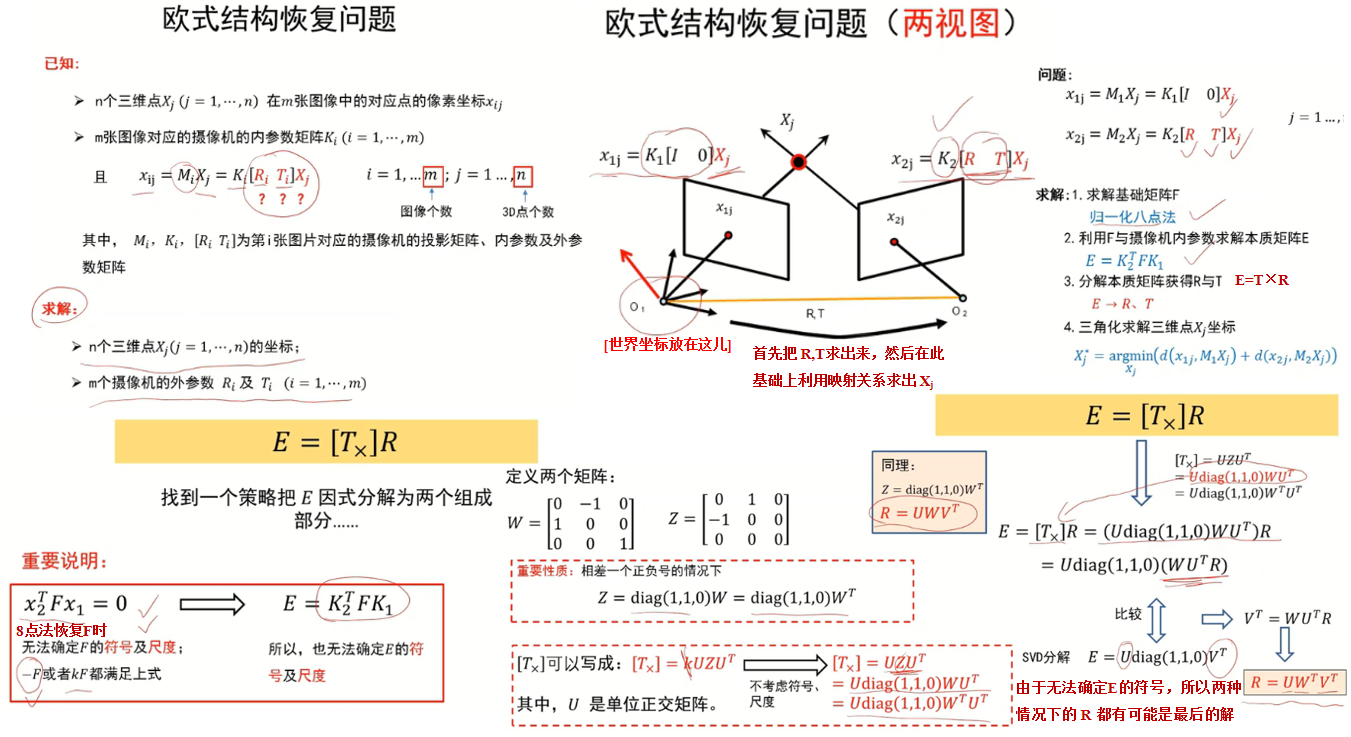
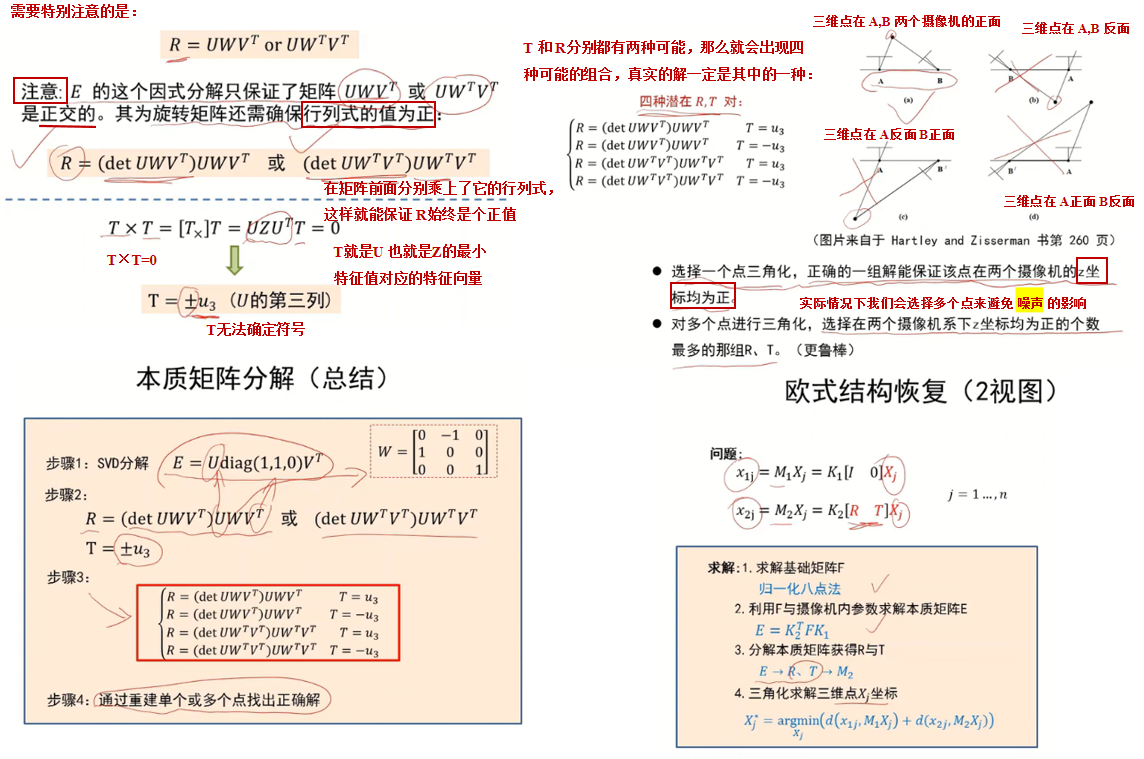
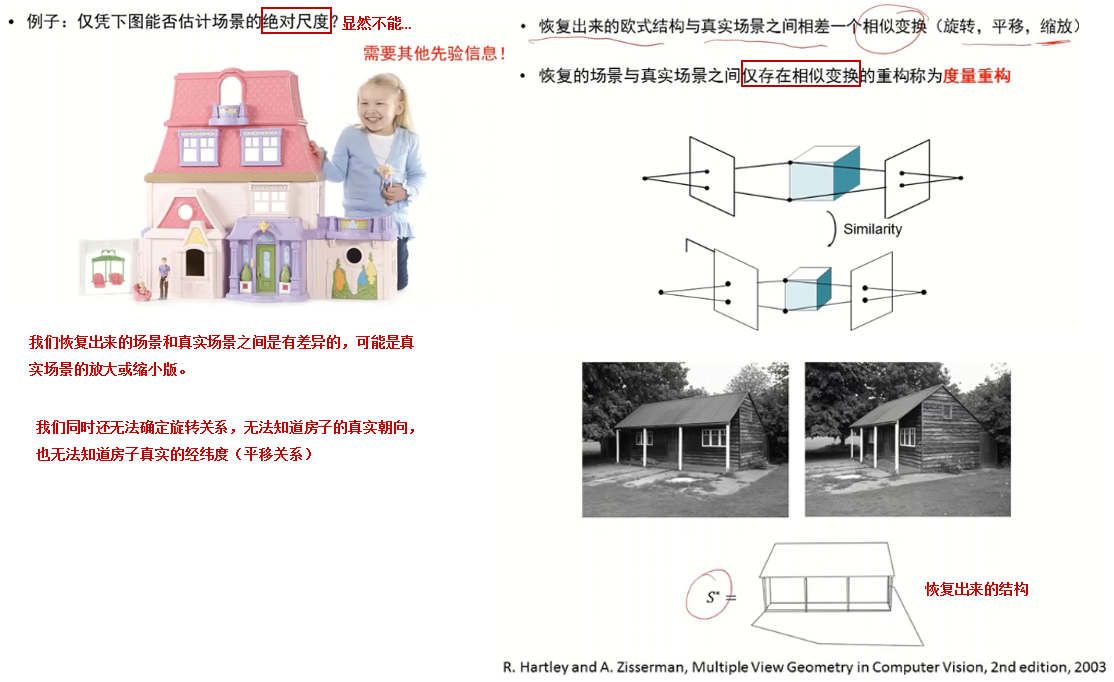
欧式结构恢复歧义
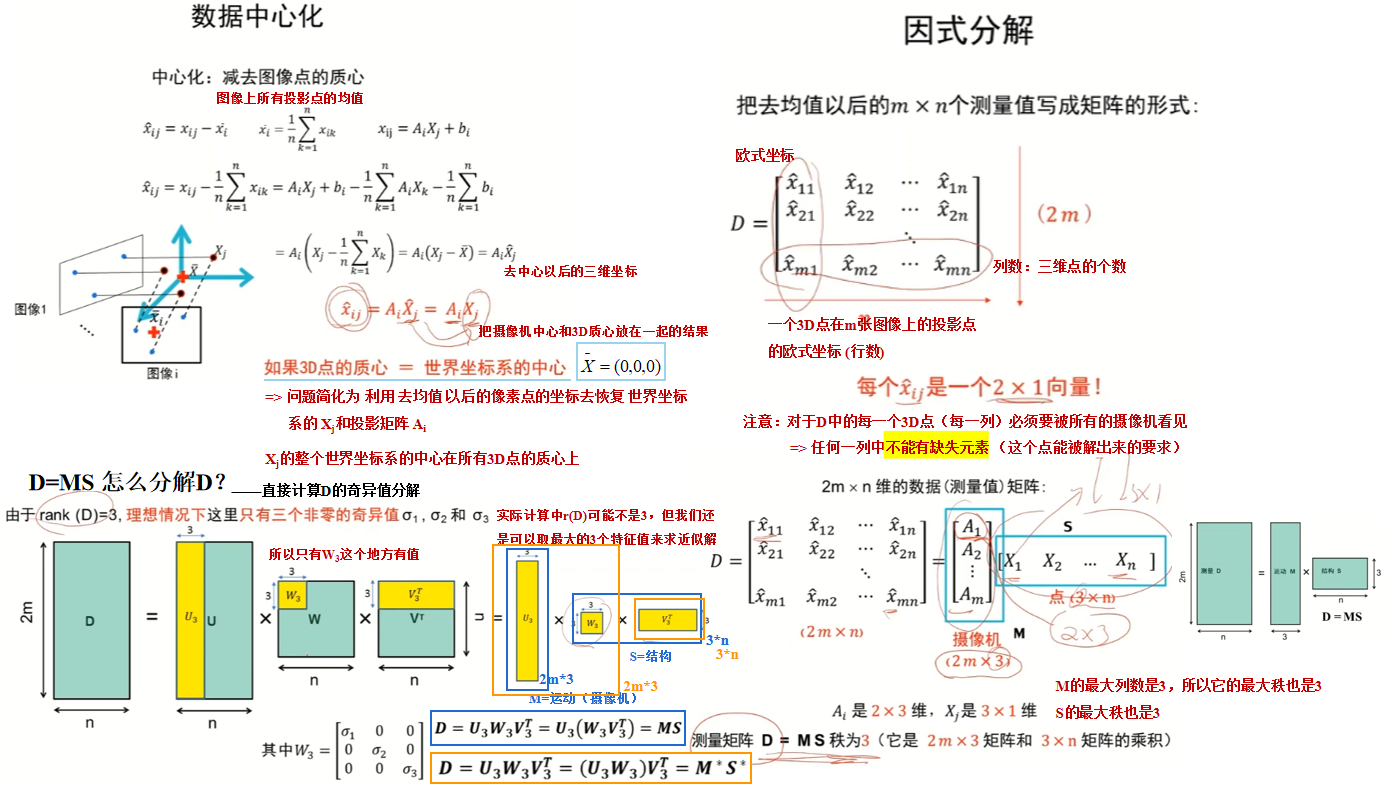
仿射结构恢复 (仿射相机,内、外参数 均未知 )
应用场景:待重构的物体 离摄像机较远 ,且待重构的物体或场景 深度变化不大 。
(相对而言,仿射相机的 参数更少 ,恢复起来更方便简洁)
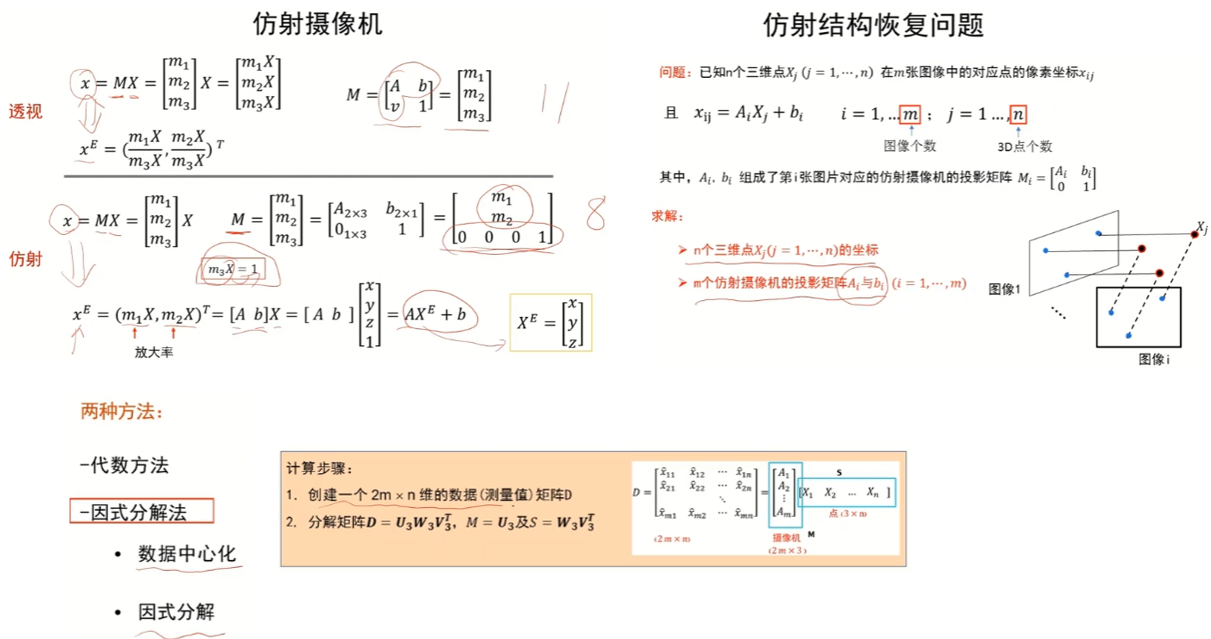
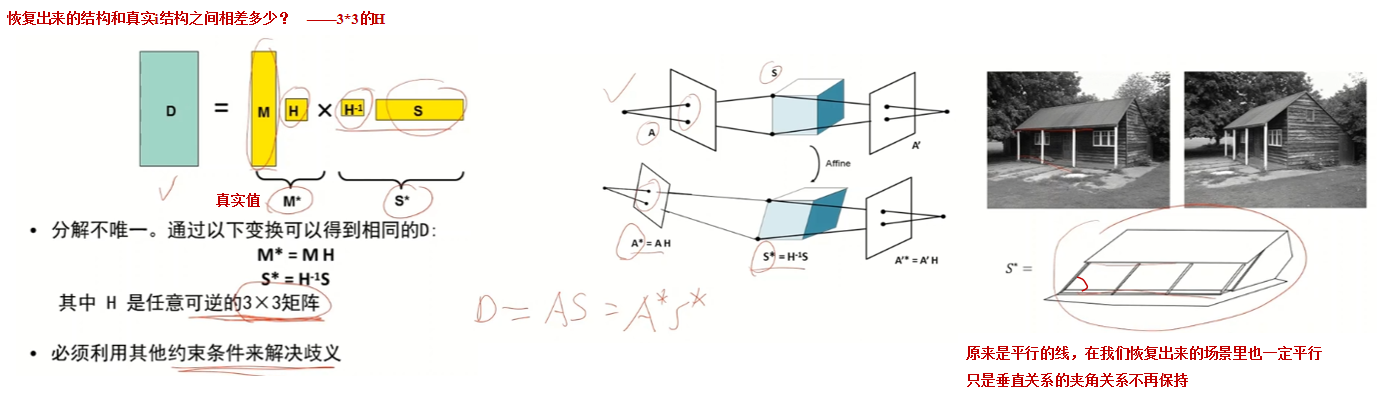
仿射结构恢复歧义
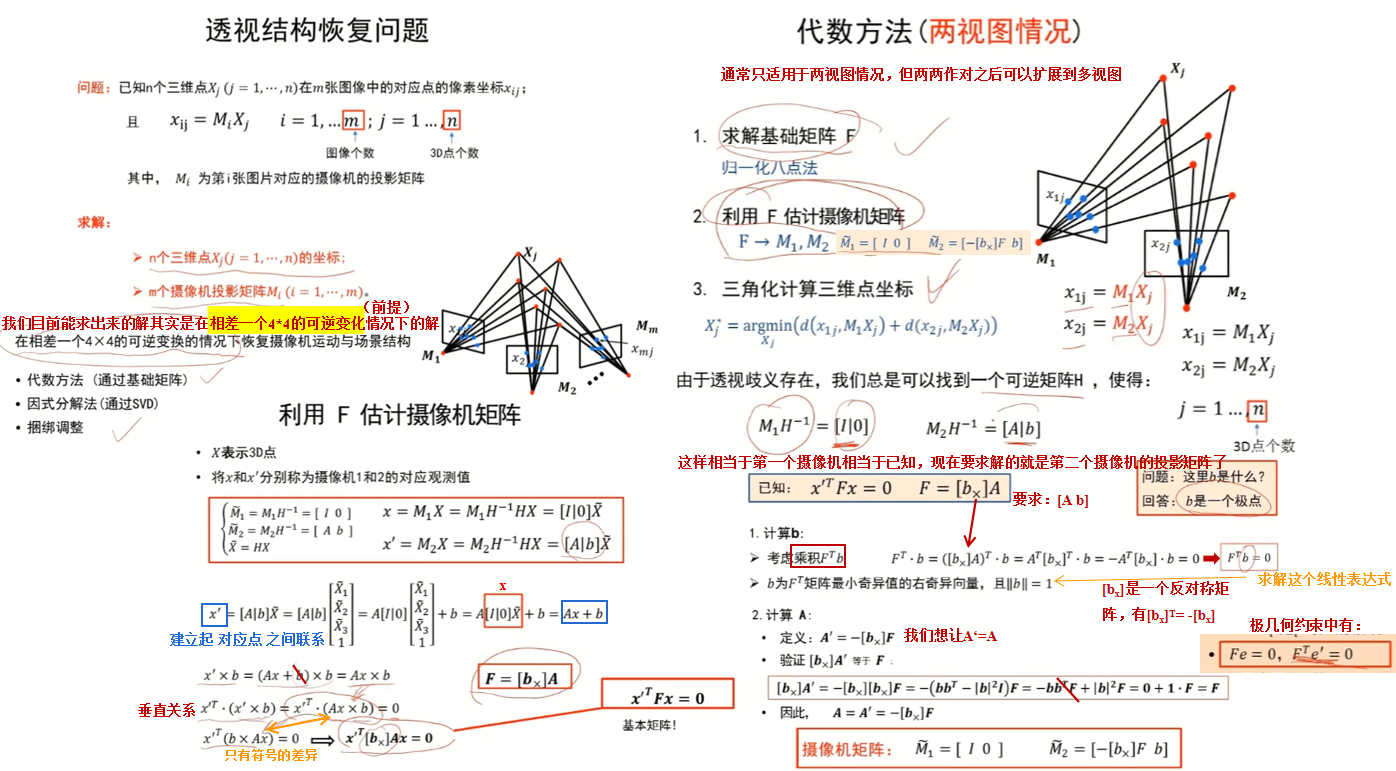
透视结构恢复 (透视相机,内、外参数 均未知 )
由于 约束比较少 ,所以应用范围更广。
eg.从互联网上下载一系列图片,并从这些图片重构出三维场景(不知道每张图片的摄像机参数,当然也不能忽略场景的深度变化)。
透视结构恢复歧义
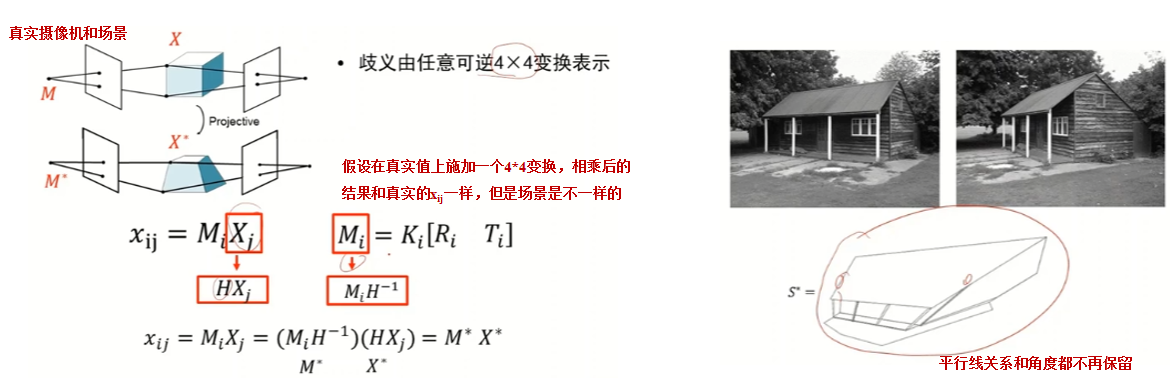
透视结构恢复
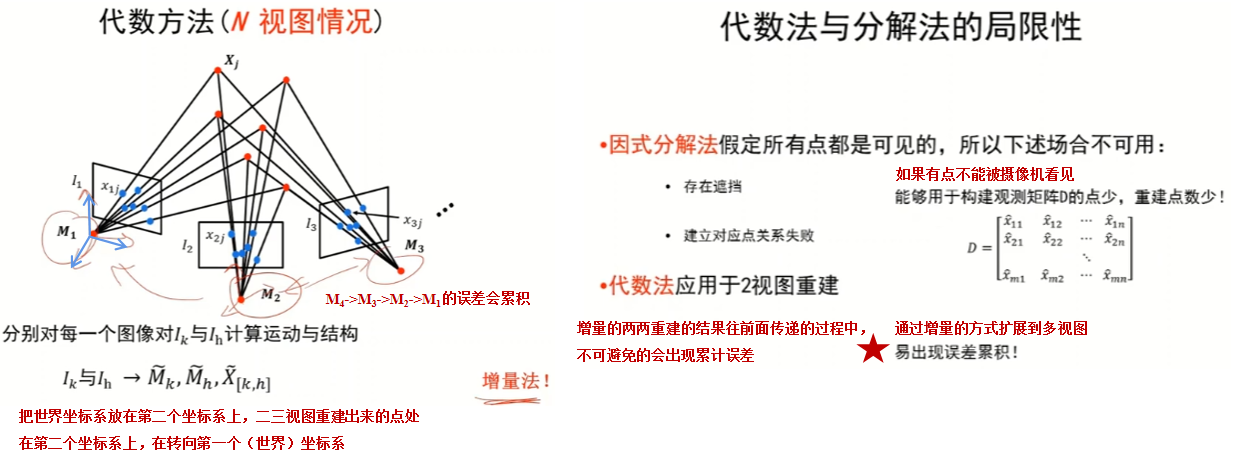
主要有 三种方法:代数方法、因式分解法、捆绑调整
代数方法
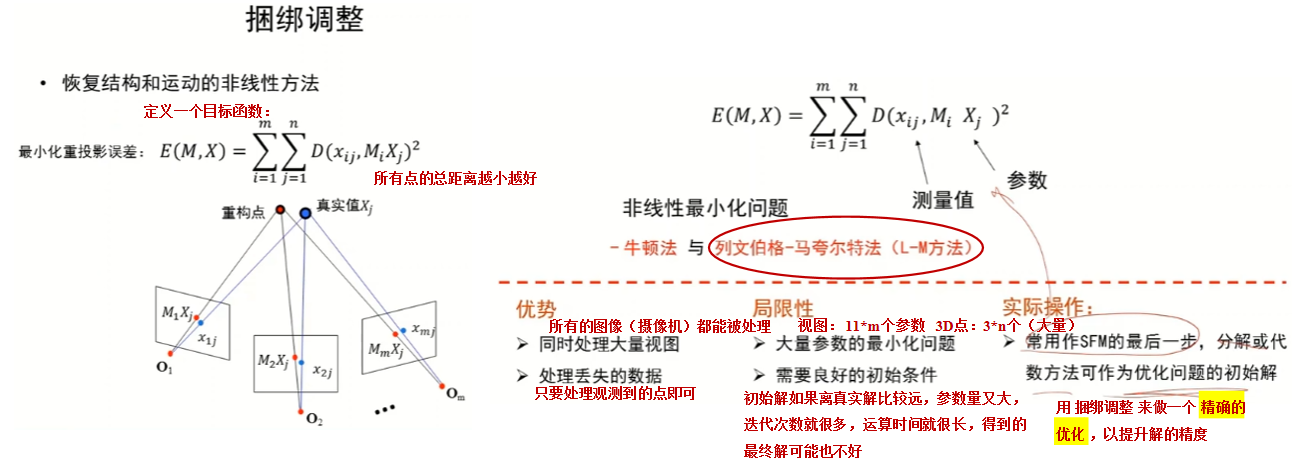
捆绑调整















 6万+
6万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









