







 本文介绍了如何使用广度优先搜索(BFS)算法对16线激光雷达点云进行聚类分析。首先对点云数据进行有序排列,存储到三维矩阵中。接着,通过识别路面点,利用BFS进行聚类操作,实验结果显示聚类效果良好,白色点代表道路平面,其他颜色点为聚类结果。
本文介绍了如何使用广度优先搜索(BFS)算法对16线激光雷达点云进行聚类分析。首先对点云数据进行有序排列,存储到三维矩阵中。接着,通过识别路面点,利用BFS进行聚类操作,实验结果显示聚类效果良好,白色点代表道路平面,其他颜色点为聚类结果。
广度优先搜索(BFS)是一种可以用于连通性分析的算法,也可以用于迷宫问题的求解。最近看点云处理的相关算法,发现BFS也可以用于点云的聚类,于是用16线激光雷达点云做了下实验。
不过首先需要对激光雷达点云进行有序排列,将点云数据根据行列存入一个点云变量中。16线激光雷达的扫描范围为360度,一共16条扫描线。横向角度分辨率为0.2度,纵向为2度。于是一条扫描线上的激光点数目最多为:
360 / 0.2 = 1800 360/0.2=1800 360/0.2=1800
于是可以把一帧点云数据有序地存放到一个16x1800的3维矩阵中。
路面检测
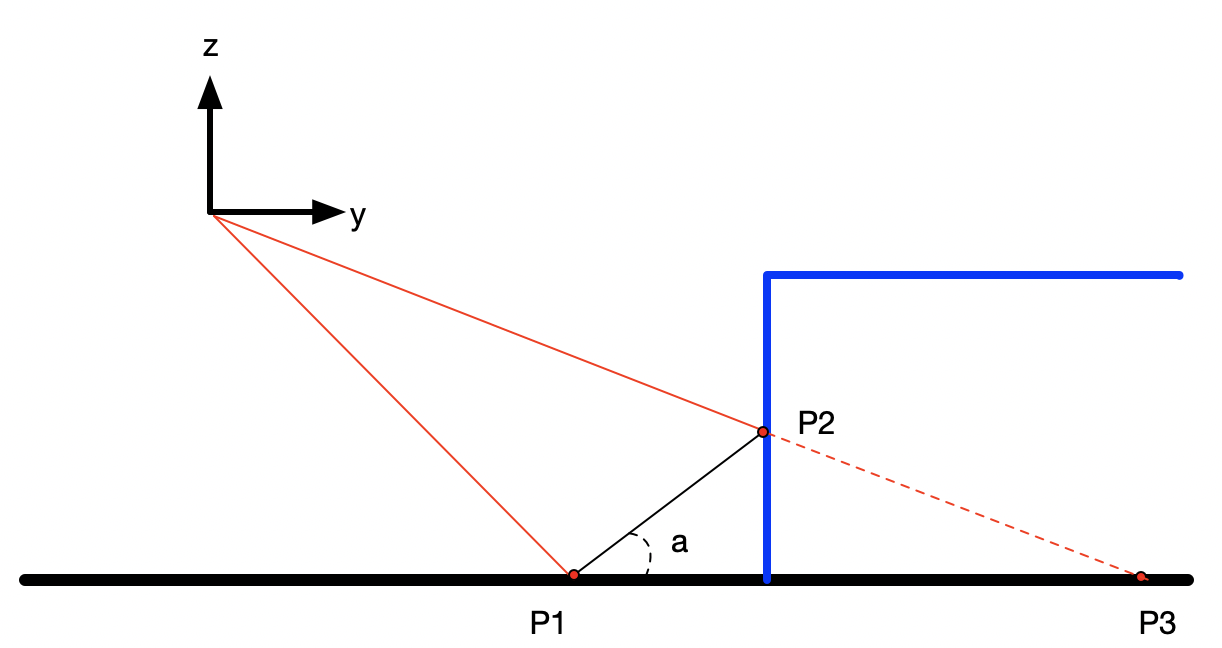
如图所示,底部黑色粗实线代表路面,蓝色粗实线代表障碍物。P1和P2时同一列上相邻的两个激光点。此时 ∠ a > 0 \angle a > 0 ∠a>0。当不存在障碍物时,P2落在地面上的P3位置,此时 ∠ a = 0 \angle a = 0 ∠a=0。根据这个性质就可以把路面点给标记出来。 ∠ a \angle a ∠a的计算比较简单就不放公式了。
聚类
然后就可以不考虑路面点,而对剩下的点进行BFS聚类,效果如下。
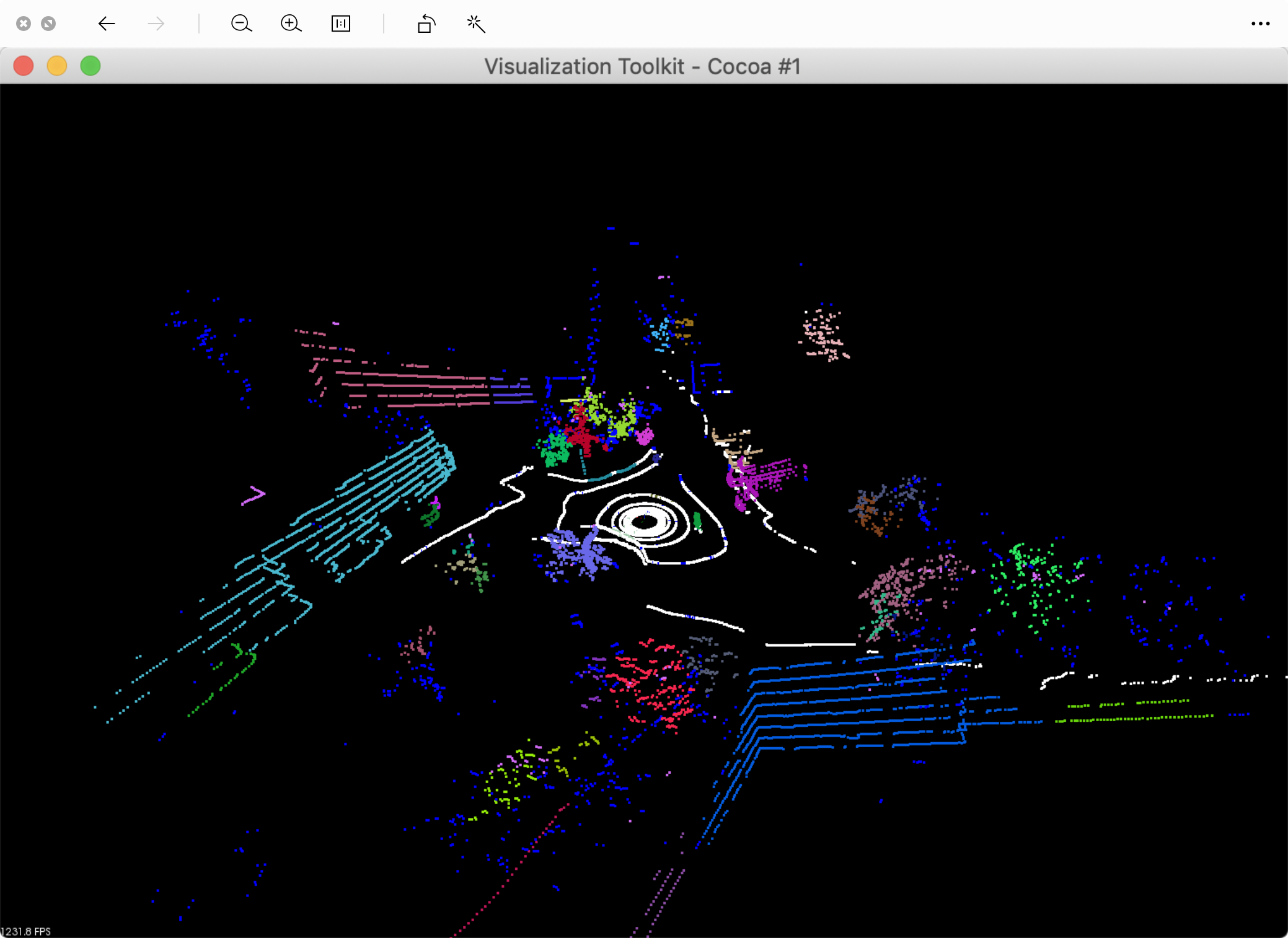
其中白色点为标记出来的道路平面上的点,其余是根据相邻点的空间距离得到的聚类结果。
代码写的有点粗糙
#include <boost/thread/thread.hpp>
#include <pcl/common/common_headers.h>
#include <pcl/features/normal_3d.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/console/parse.h>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <ope 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 301
301

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









