






立体仓库 西门子1200 西门子1200码垛机完整项目程序,博图1200立体库码垛机带 注释 ,程序 涉及到变频器,触摸屏,工业机器人,视觉相机的程序控制.modbus tcp通讯,SCL编程,支持博图13以上版本
ID:3824635487662554
爱吃醋泡海带的香槟
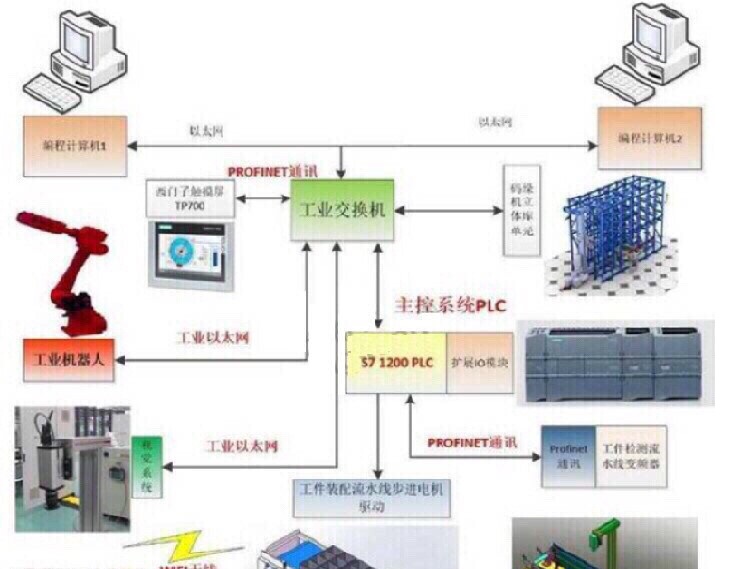
立体仓库是现代物流管理的重要组成部分,它采用先进的技术手段,通过智能化的仓储设备和程序控制系统,实现高效的货物存储和调度。在立体仓库系统中,西门子1200码垛机是一款功能强大、性能稳定的设备,能够实现自动化的货物码垛操作。本文将围绕西门子1200码垛机的程序进行深入分析和讨论,包括程序结构、功能模块、实现原理等方面。
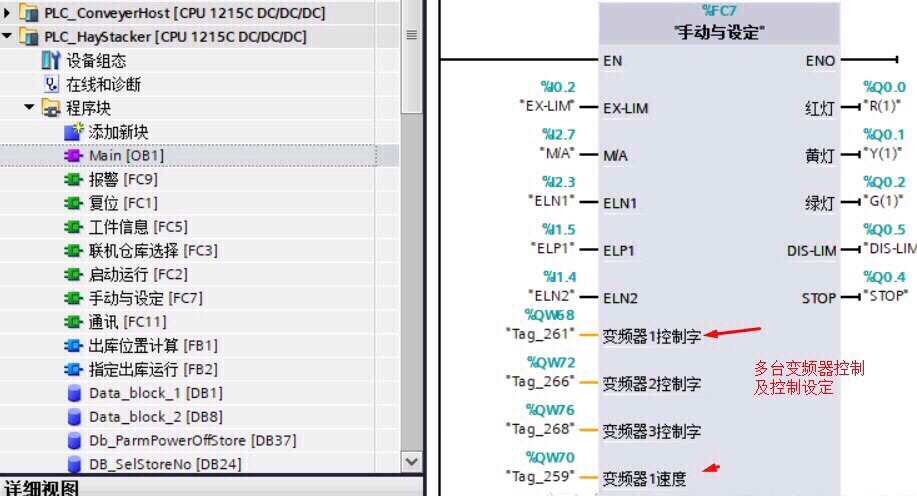
首先,我们来看一下西门子1200码垛机的程序结构。该程序主要包括变频器控制、触摸屏操作、工业机器人控制、视觉相机的程序控制等模块。通过这些模块的联动和协作,实现了整个码垛过程的自动化控制。其中,变频器控制模块负责控制码垛机的运动和速度,触摸屏操作模块提供用户界面,方便操作人员进行参数设置和监控,工业机器人控制模块负责实现码垛动作,视觉相机的程序控制模块实现对货物的识别和定位。
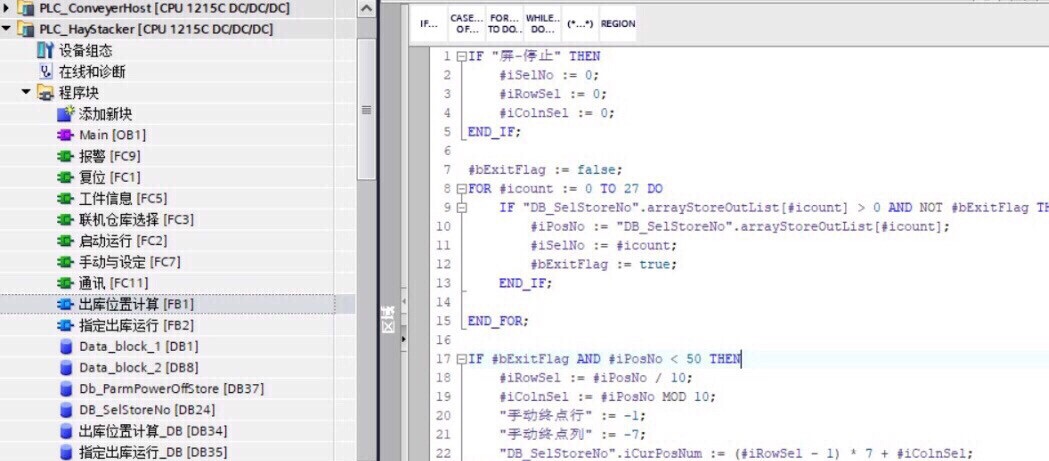
在程序的实现过程中,需要使用到modbus tcp通讯和SCL编程技术。modbus tcp通讯是一种常用的工业通讯协议,通过这种协议,码垛机与上位机之间可以进行数据的传输和交互。SCL编程是西门子PLC编程语言之一,它对于实现复杂的控制逻辑非常有用。在码垛机的程序编写过程中,需要充分利用这两种技术,实现程序的稳定性和可靠性。
除了上述的技术要点外,博图13以上版本也是程序开发的一个重要因素。博图是一款专业的自动化控制软件,提供了丰富的功能模块和编程接口。博图13以上版本在性能和稳定性上相比于之前的版本有了很大的优化,可以更好地满足立体仓库的需求。
总结起来,西门子1200码垛机的程序控制涉及到多个方面的技术,包括变频器控制、触摸屏操作、工业机器人控制、视觉相机的程序控制等模块。在程序的编写过程中,需要使用到modbus tcp通讯和SCL编程技术,以及充分发挥博图13以上版本的功能。通过合理的程序结构和技术手段的应用,可以实现码垛过程的自动化控制,提高仓库的工作效率和管理水平。
相关的代码,程序地址如下:http://imgcs.cn/635487662554.html
















 805
805











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









