









http://blog.csdn.net/gaoleikidkidkid/article/details/22159481
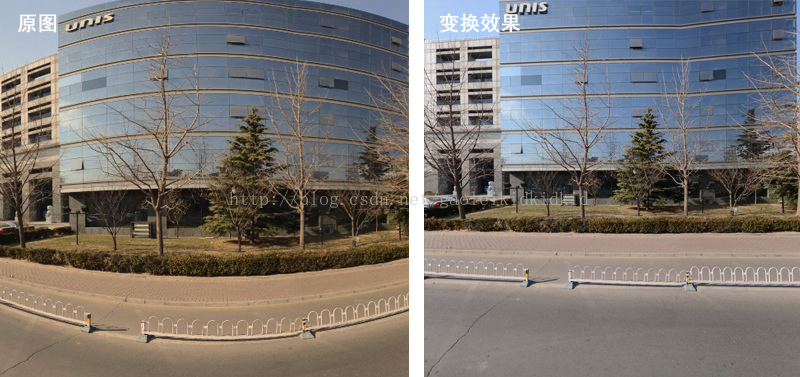
最近做了一个全景图片平面映射的工作,就是将一个360度的全景球面照片映射到一个平面上,使之看上去没有变形。由于网上的一些鱼眼照片的校正程序不好用,自己通过球体的三角计算,找到了映射效果较好的方法。写博客以备忘。先看看效果。

做完以后又进行了一些改造,使程序变成一个可变大小,可变角度的相对较通用的程序。本人能力偏弱,只能用笨办法想问题,不足之处敬请海涵。
主要的算法是这样的。当从平面转成球面的时候,需要从圆心引一条直线,通过平面图片的每一个像素,打到球面上,把这个平面的像素给球面即可。我想平面的映射应该就是反过程。关键是怎么求球面的点与平面的点之间的关系。因为虽然是球面的图片,但是只是视觉上是球面的,其图片结构还是二位的像素点。我们来看看具体的分析。
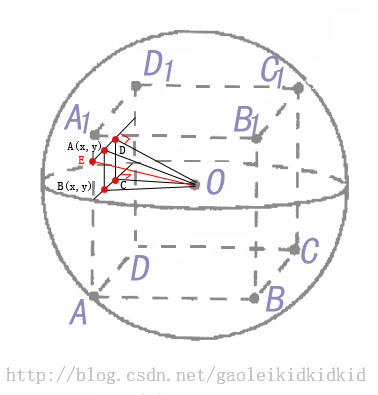
图片上就是我手绘的一个示意图。将球面映射到平面时,需要新建一个平面图片。对平面的图片的横纵左边点循环,跑遍每一个点,做点与圆心o的连线,打到球面上,球面上点与球面图片的左右边界之间的弧长,就是我们要求的球面图片的横坐标。那么弧长如何计算呢?很显然就是使用圆心角的角度乘以球的半径。(因为过圆心,所以是大圆。半径就是把图片的宽度作为大圆周长,求出来的半径R)。圆心角如何求呢?我能想到的比较直接的办法是三角几何。图片上的A点就是我们的平面上任意一点,我们要求的是Ao与红线的夹角。那么就是Do与红线夹角减去Do与Ao夹角就是了。Do与红线夹角为平面图片长度的一般,假设是length/2。Do的长度可以用DCo这个直角三角形,通过勾股定理来求,值为sqrt(y*y+length/2*length/2)。红线与A所在水平直线的交点假设为E,那么ED就是length/2。所以DoE=arctan(ED/Do)。DoA=arctan((length/2-x)/Do)。那么我们求的AoE就是DoE-DoA=arctan(ED/Do)-arctan((length/2-x)/Do)。用这个角度直接乘以半径R就是横坐标了。当点在平面的右半部分时,把length/2-x变成x-length/2即可。
纵坐标的求取跟这个很像,只需要求AoB的角度。通过BC与oC的直角三角形勾股定理求Bo。然后AoB就是arctan(AB/Bo)。球的这段弧长就是arctan(AB/Bo)*R但是还有一个问题,现在只是求的弧长,但是我们要求的是球面图片的纵坐标,因此需要用球面图片的高度的一般减去弧长。这样我们就求得了每个点对应的坐标。将图片显示出来即可。
这个是基本的思路,程序和算法都很简单,但效果不错,也比较稳定。
因为是360度的全景,因此显示完一部分后我们会想显示其他部分,我们将想显示的角度放到一个vector<float>d中,然后在循环中变化角度,把每个角度转换完的图片放到一个vector<IplImage*>results向量中,并显示出来。在使用vector<IplImage*>results向量,push_back时,遇到了麻烦,耽误了快一天的时间解决这个push_back会覆盖之前图像的问题,愁死我了。这个会在另外的一篇博客中提高。我的工程文件在资源中可以找到。
还有一个问题是求出来的图像像素点是近似的,因此会模糊,需要处理一下,就是讲不是整数的点,通过上下左右四个点,求一下平均,图像会好很多。函数的主要部分是这样的:
横坐标求取代码如下:















 1672
1672

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









