







以“一切为了开发者”为主题的“ 2024 开放原子开发者大会暨首届开源技术学术大会”于 12 月 20 日至 21 日在武汉成功举办,OpenLoong开源社区策划协办了人形机器人分论坛。在分论坛上,邀请刻行时空联合创始人杨哲轩发表了题为《从自动驾驶看具身智能中的数据闭环》的主题演讲,讨论了开源在推动经济发展和科技创新中的重要性,以及自动驾驶技术发展对具身智能领域的启示,强调了数据闭环系统在具身智能发展中的关键作用,并展望了刻行时空公司在开源和数据驱动通用智能方面的愿景。

自动驾驶
汽车可能是机器人的一个特例。汽车是三维空间中只有两个自由度的机器人。这两个自由度分别是左右和前后。而传统的单臂机器人的自由度是 7 个, 双臂的人形机器人自由度只会更高。以 OpenLoong 的公版机器人青龙为例,其自由度已经达到 43 个。具身智能和人形机器人的结合,其难度可能远超自动驾驶。
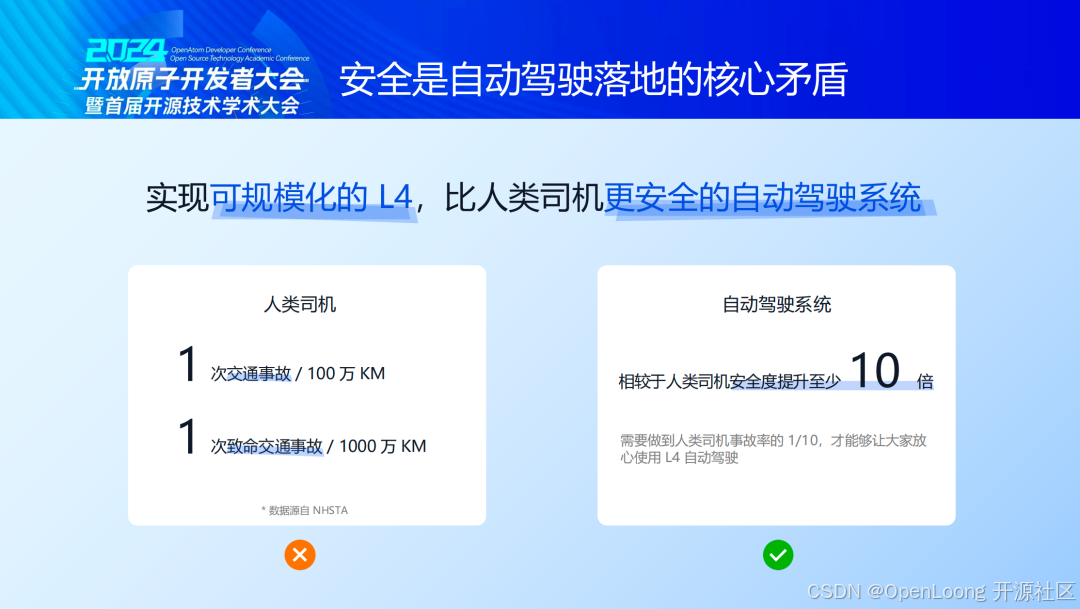
安全问题,这是自动驾驶落地的核心矛盾。为了实现可规模化的 L4 级别自动驾驶,我们需要比人类司机更安全的系统。根据 NHTSA 的数据,人类司机的致命交通事故发生率是每 1000 万公里 1 次,而自动驾驶系统需要将这一比率降低到 1/10 ,才能让
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









