







本文介绍了“格物”仿真平台的核心功能、技术创新、使用流程及未来愿景等。“格物”平台旨在降低机器人强化学习和运动控制的技术门槛,提供一站式仿真训练环境,加速机器人智能体的开发与应用。
获取完整PDF & 开源链接:
文末附有完整发布文档的下载链接及 Github 开源地址,欢迎深入了解“格物”仿真平台的技术细节及应用案例!
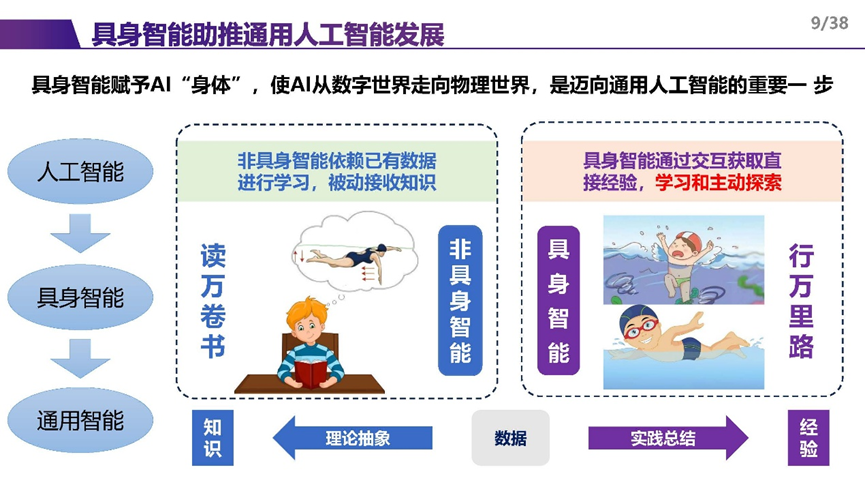
在当今科技飞速发展的浪潮中,人工智能领域正迎来一场深刻的变革。从深度学习的崛起,到大模型的横空出世,再到如今具身智能的蓬勃发展,我们正一步步迈向通用人工智能的宏伟目标。
2025年3月21日,在格物具身智能仿真平台发布会 上,上海大学副教授叶林奇正式发布了 “格物”具身智能仿真平台(Unity RL Playground)。作为具身智能领域的重要创新,“格物”平台旨在降低机器人强化学习和运动控制的技术门槛,提供一站式仿真训练环境,加速机器人智能体的开发与应用。

具身智能:
迈向通用智能的关键一步
近年来,深度学习、强化学习和大模型的快速发展推动了人工智能向具身智能迈进。从 AlphaGo 战胜人类围棋冠军到 AI 星际争霸超越99.8%的人类玩家,AI 在虚拟世界的智能表现或许已超越人类。然而,在机器人等物理实体上赋予 AI 感知、学习、推理和环境交互能力,仍然面临巨大挑战。

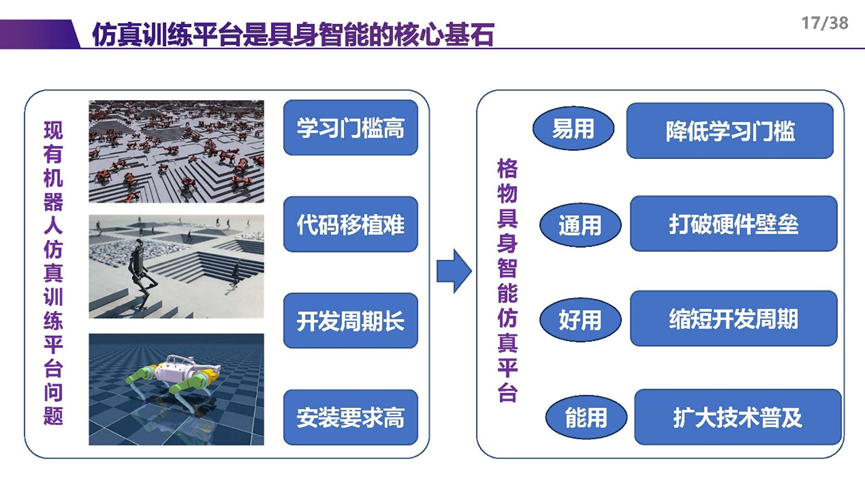
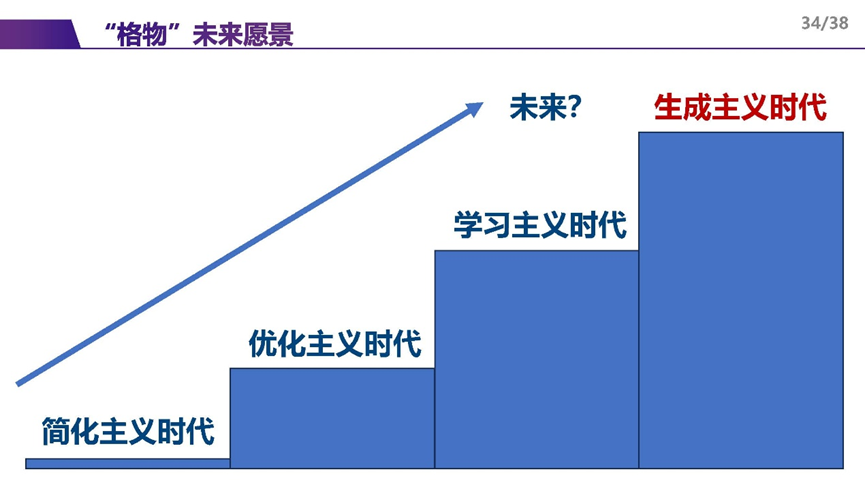
当前,机器人控制已经进入学习主义时代,强化学习成为了主流的控制范式。强化学习技术在机器人领域取得的巨大成功离不开仿真技术的突破,仿真训练平台是具身智能的核心基石。


近年来,全球多个顶尖实验室推出了 Legged Gym、Isaac Lab、MuJoCo Playground 等为代表的高性能仿真训练平台,为机器人强化学习训练提供支持。然而,现有平台普遍面临学习门槛高、代码移植难、开发周期长、安装要求高等问题,限制了具身智能技术的普及和应用。

格物仿真平台:推动具身智能技术的开源与创新
在这样的背景下,“格物”具身智能仿真平台应运而生。它是由国地共建人形机器人创新中心(以下简称“国地中心”)、上海大学、清华大学等顶尖科研团队联合开发的一款开源平台,“格物”致力于通过低门槛、通用化、全链路、高兼容的特性,让机器人开发者能够更加便捷地进行自己机器人的仿真训练及实机部署。

零门槛开启智能体训练
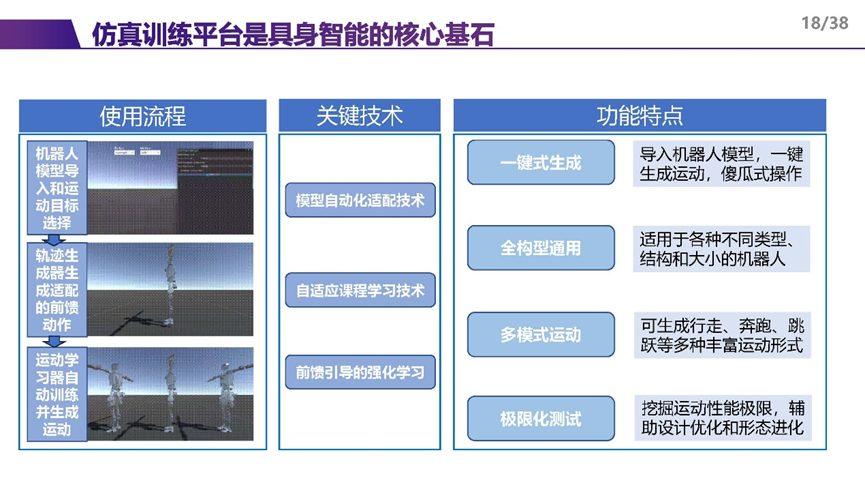
“格物”平台的核心优势之一在于其一键式生成功能。用户无需具备深厚的编程基础,也无需花费大量时间进行复杂的代码编写和调试。只需导入机器人模型,选择运动目标,平台即可自动生成适配的前馈动作,并通过运动学习器自动训练生成所需的运动。无论是行走、奔跑还是跳跃,平台都能轻松实现,大大降低了学习门槛,让更多的研究者和开发者能够快速上手,投入到具身智能的研究中。
多模式运动满足多样化需求
在实际应用中,机器人面临着各种不同的任务和环境需求。“格物”平台支持多种运动模式,能够生成丰富多样的运动形式。无论是简单的拟人行走,还是复杂地形越障,亦或是高速奔跑、敏捷跳跃,平台都能为开发者提供高效的训练环境。同时,平台还具备极限化测试功能,能够挖掘机器人的运动性能极限,辅助设计优化和形态进化,使其在各种场景下都能发挥出最佳性能。
全构型通用打破硬件壁垒
硬件的多样性一直是制约具身智能发展的难题之一。不同的机器人平台往往需要针对其特定的结构和硬件进行定制化的开发和调试,这不仅增加了开发成本,也限制了技术的普及和推广。“格物”平台以其全构型通用的特点,完美地解决了这一问题。它适用于各种不同类型、结构和大小的机器人,无论是人形机器人、四足机器人还是轮足机器人,只需一套代码,即可在多种机器人平台上实现无缝复用。这种高度的通用性打破了硬件壁垒,让开发者能够更加专注于算法和模型的研究,加速具身智能技术的发展。
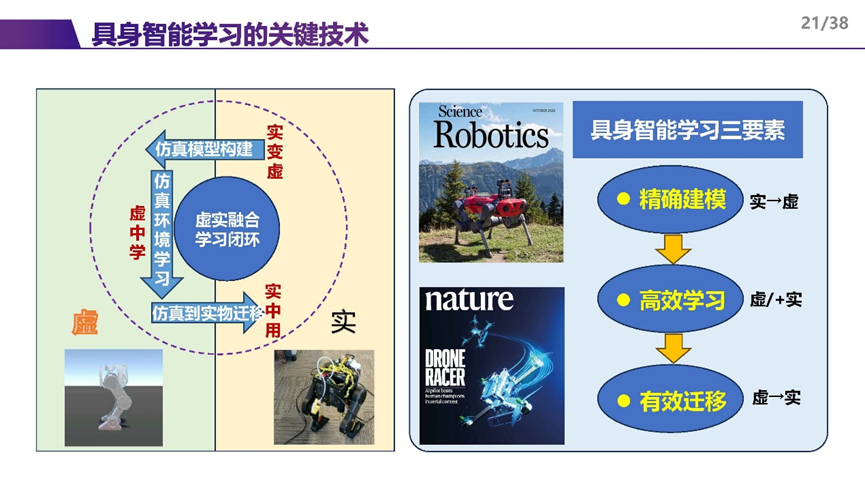
构建高效学习闭环
具身智能的学习离不开与环境的交互,而“格物”平台通过虚实融合的方式,构建了一个高效的学习闭环。在仿真环境中,用户可以精确地构建仿真模型,进行高效的算法学习和测试。通过仿真到实物的迁移技术,将训练好的模型应用到实际机器人上,实现从虚拟到现实的无缝过渡。同时,平台还支持在线学习功能,基于实际机器人的表现数据对控制策略进行微调,进一步优化算法和模型。这种虚实融合的学习方式,不仅提高了学习效率,还增强了模型的鲁棒性和适应性,让机器人能够在真实环境中更好地完成任务。
创新技术:引领具身智能训练新潮流
“格物”平台不仅在功能上具有显著优势,更在技术层面实现了多项创新突破。
自适应课程学习技术
“格物”平台采用了先进的自适应课程学习技术,能够根据机器人的学习进度和表现,自动调整训练难度和内容。就像一位经验丰富的教练,它会根据学员的能力水平,逐步引导其进行更高难度的训练,从而提高学习效率,缩短学习周期。这种智能化的训练方式,让机器人能够在短时间内掌握复杂的技能,快速成长。
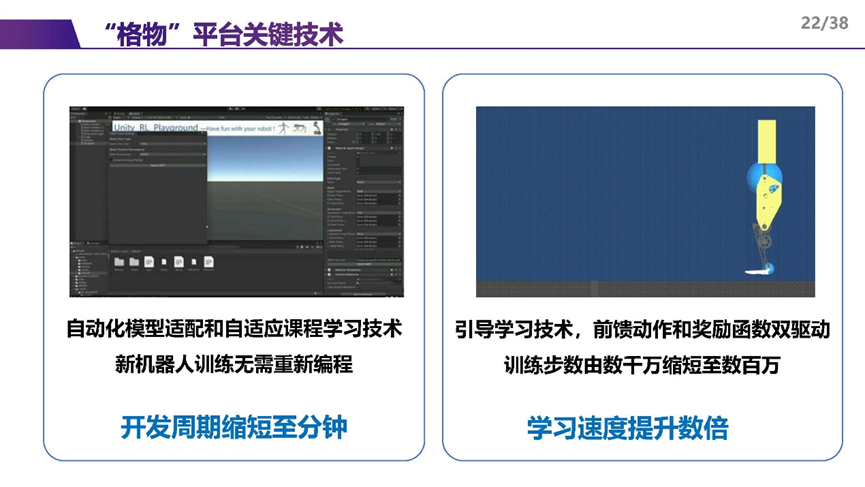
模型自动化适配技术
“格物”具身智能仿真平台的关键技术之一是模型自动化适配技术。通过自动化的手段,”格物“可以根据机器人类型和运动目标自动匹配奖励函数和前馈动作,这一技术大大降低了开发门槛,使得开发者无需深入了解不同机器人的硬件细节,即可快速实现模型的训练。能够帮助开发者节省大量的时间和精力,专注于算法和模型的研究,加速具身智能技术的开发和应用。

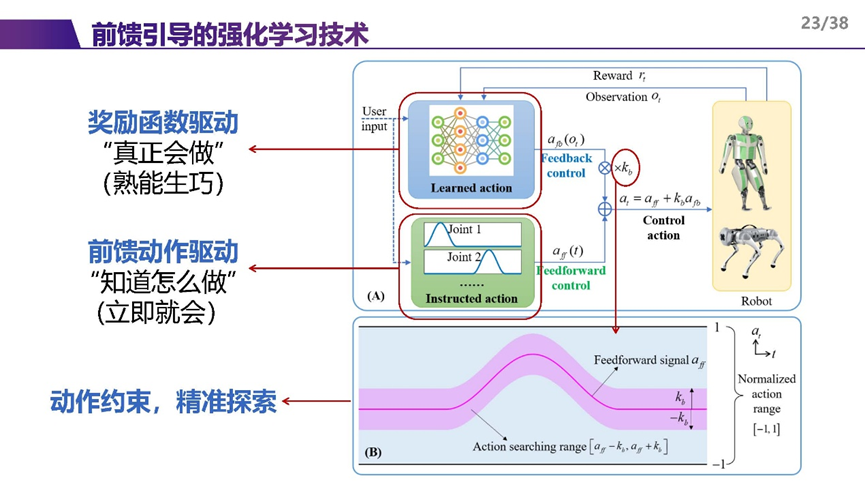
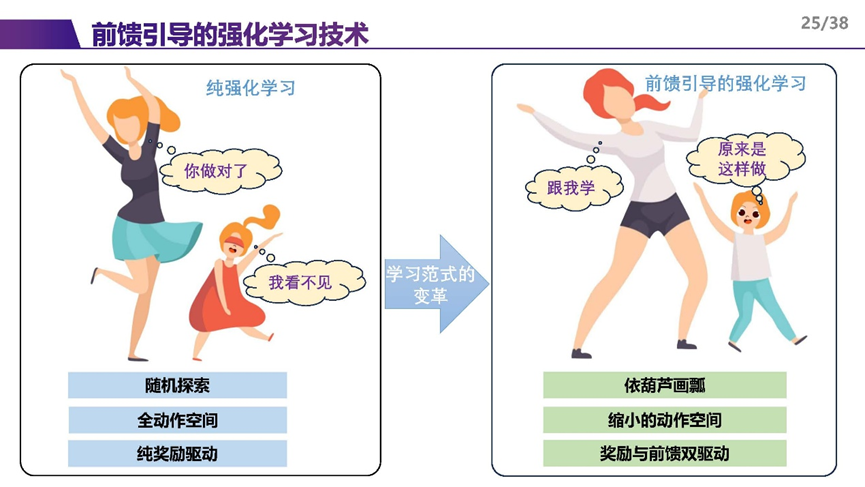
前馈动作和奖励函数双驱动
在强化学习的基础上,“格物”平台引入了前馈引导机制。通过前馈动作驱动,机器人能够快速获得初步的动作指导,实现“知道怎么做”的目标。同时,结合奖励函数驱动,机器人在实践中不断优化动作,达到“真正会做”的境界。这种前馈与奖励双驱动的学习范式,大大加快了机器人的学习速度,将训练步数从数千万缩短至数百万,让机器人能够更快地适应环境,完成任务。
使用流程:开启探索“格物”之旅
1. 导入机器人模型
模型准备:首先,用户需要准备一个机器人模型。这个模型可以是现有的机器人设计,也可以是用户自行设计的机器人模型。模型文件为使用最广泛的的URDF格式。
导入操作:将机器人模型导入到“格物”平台中。平台提供了直观的界面和工具,方便用户完成模型的导入操作。
2. 选择运动目标
目标定义:在平台中,用户需要选择机器人类型和需要完成的运动目标。这些目标可以是简单的动作(如行走、奔跑、跳跃),也可以是复杂的任务(如在复杂地形中越障、踢球等)。
参数设置:根据运动目标,用户可以设置相关的参数,例如速度、运动范围等。这些参数将指导平台生成适配的运动策略。
3. 一键生成运动
前馈动作生成:平台的轨迹生成器会根据导入的机器人模型和定义的运动目标,自动生成适配的前馈动作。这些前馈动作是机器人完成任务的初步动作指导。
运动学习器训练:生成的前馈动作将被送入运动学习器,运动学习器会利用强化学习算法对机器人进行自动训练。在这个过程中,平台会根据奖励函数和环境反馈,不断优化机器人的动作策略。
4. 仿真环境测试
环境构建:在平台的仿真环境中,用户可以构建各种复杂的场景,包括不同的地形、动态障碍物等。这些场景将用于测试机器人在不同环境下的运动性能。
性能评估:通过仿真测试,用户可以评估机器人在各种场景下的表现。
走向人机共融的未来社会
“格物”平台的发布,不仅为具身智能的研究和开发提供了强大的工具支持,更为我们描绘了一个美好的未来蓝图。随着具身智能技术的不断发展,人形机器人、四足机器人等智能体将逐渐走进我们的生活,成为我们生活和工作中的得力助手。它们将在危险环境中代替人类执行任务,承担重复性、枯燥的工作,甚至在复杂的社会环境中与人类协同合作,构建一个人机共融的社会。
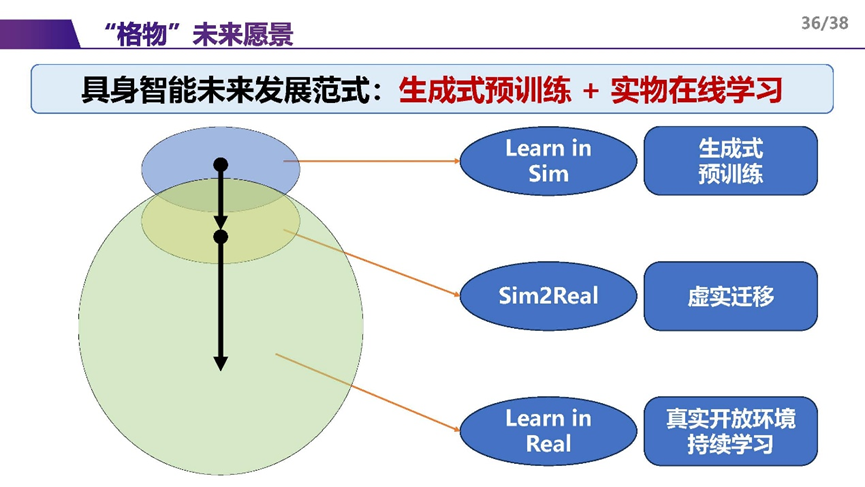
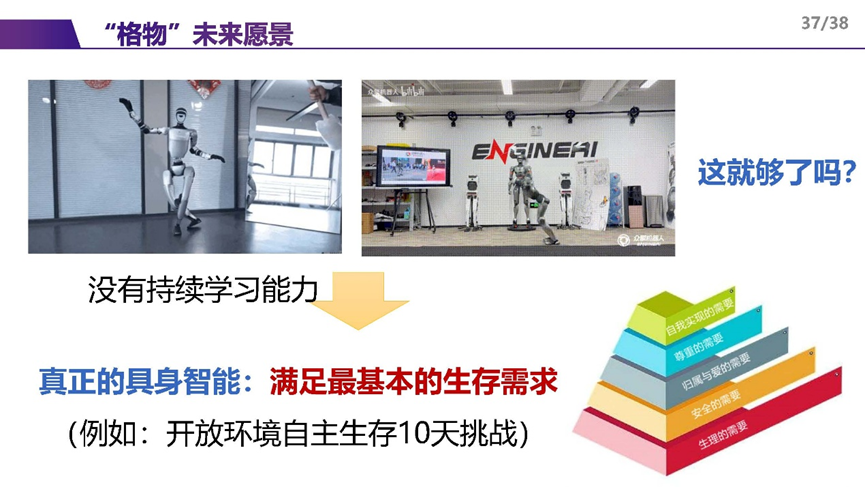
未来,“格物”将进一步探索生成式预训练+实物在线学习的智能体发展范式,使机器人具备持续学习能力,向真正的自主智能迈进,不仅推动仿真技术的发展,更助力人形机器人等具身智能系统的广泛应用。作为开源的具身智能技术平台,“格物”倡导全球开发者、研究机构和企业共同参与,推动智能机器人在工业、服务和科研等领域的广泛应用,加速人机共融社会的实现。
正如马斯克所预测的那样,最迟2026年我们将实现通用人工智能,而人形机器人的数量将在2040年突破100亿。马斯克的预测看似遥远,但“格物”平台的出现,正在推动这一目标的实现,它将为具身智能的发展注入强大的动力,推动我们更快地迈向人机共融的未来。

OpenLoong 开源社区提供了一个开放交流的平台,在这里,大家可以共同探讨机器人仿真的难点与创新点。本次技术稿件也将在开源社区进行共享,欢迎大家点击下载稿件PDF,一起进行交流。
此外,“格物”具身智能仿真平台的完整代码和资源也已公开在Github上,感兴趣的朋友可扫码访问,了解更多“格物”资源~


















 517
517

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









