








导语:本文深入剖析了青龙全尺寸通用人形机器人硬件平台的设计理念、流程及关键系统设计。全方位介绍了青龙硬件系统的设计内容,涵盖总体设计、构型设计、功能划分与设计、行走与驱动系统设计、操纵与作业系统设计、能源动力系统设计以及感知与控制系统设计等方面,各部分均详细阐述了设计的关键点与技术细节。此外,文章还对人形机器人直线关节技术进行了探讨,为相关技术研究与应用提供了有价值的参考。
(文末附有PDF下载链接哦~)
1、设计目标与流程
1.1 青龙全尺寸通用人形机器人硬件平台设计目标
有观点认为硬件平台决定产品的瓶颈,原因在于所有创新点、算法、软件都需依托硬件平台实现。若硬件平台无法支撑,再新颖的想法、再高端的控制算法也难以落地。比如汽车领域,拖拉机绝不可能实现百公里加速二点几秒及卓越的操控,其他产品同理。因此,在人形机器人这一新兴领域,硬件平台设计是至关重要的基础,它直接关系到产品能否成功落地及落地后的效果。
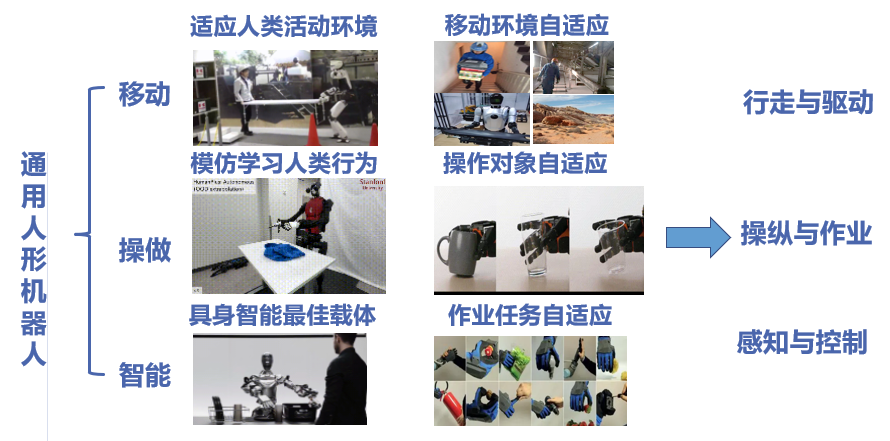
在青龙设计初期,首先要明确产品目标:要打造怎样的人形机器人?构建何种平台?具体实现哪些功能?以青龙为例,其旨在打造一款强对标人类的通用人形机器人平台,需实现以下功能:一是自适应环境,进行移动行走,如简单行走、避障等;二是能简单完成操作功能,像模仿人类学习抓取、折叠等;三是作为智能硬件平台载体,搭载AI等技术。
1.2 青龙闭环设计流程
在确定好设计目标后,将依据以下六个步骤开展青龙的闭环设计,这也是众多成功产品所遵循的主要设计流程。
一、需求分析。具体分析包括明确应用场景(如服务、工业、教育、研究等用途);需实现的性能目标(如自由度、步态速度、续航时间、负载能力、交互能力等)以及需适应的环境(如室内、室外、地面的情况等)。
二、概念设计。明确功能划分,确定机械结构(头部、躯干、四肢等)和关键模块(传感器、驱动系统、控制器等);并进行形态设计,初步确定机器人的外形,考虑尺寸、比例和外观设计等。此外,还需要对技术指标进行可行性分析,评估最初设定的目标是否可行。
三、硬件架构设计。涵盖详细的机械设计(包括关节选型、材料选型以及动力学、静力学分析等),驱动系统设计,传感器选型,控制系统设计以及电源系统设计,这一步主要是搭建和设计整体硬件架构。
四、虚拟仿真与验证。在虚拟环境下进行仿真验证,包括动力学仿真和控制算法仿真,并据此进行结构优化。
五、样机制造。搭建和装配原型样机,进行关键零件测试(如关键模组、单臂、单腿等)以及系统集成。
六、集成调试与优化。调试硬件模块,确保机械结构、驱动系统、传感器、控制器正常工作。测试底层控制程序、运动规划和交互算法。验证基本功能,如步态稳定性、运动灵活性、环境适应性。在实际任务场景中测试机器人表现,包括负载测试和连续运行稳定性。根据测试反馈调整结构设计和算法参数。改进模块化设计,提升维护性和扩展性。在保证性能的基础上优化生产成本,为批量生产做准备。
2、“青龙”硬件系统设计内容
2.1 青龙全尺寸通用人形机器人硬件系统总体设计
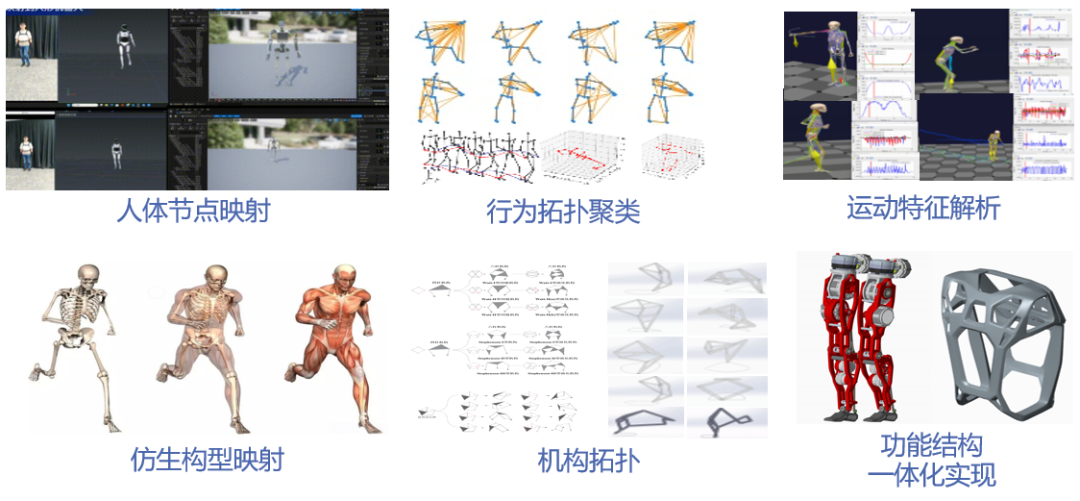
要打造高度对标人类的全尺寸机器人,需对人体各节点进行分析,深入研究人的运动方式、关节组成以及各关节的自由度情况,以此为后续整体结构设计提供理论支撑。
基于上述六步流程,青龙机器人的硬件总体设计构建了人-机融合仿生映射机器人总体设计体系,采用行为特征提取、机构-尺度综合、功能结构一体化设计等手段,实现了高动态、高承载、强仿生、全尺寸人形机器人研制。
2.2 构型设计
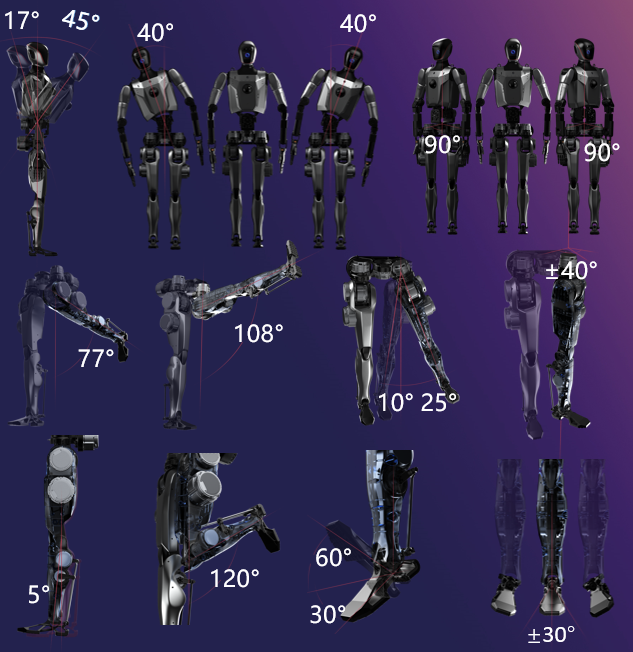
根据上一步的分析,接下来进行机器人的构型设计。青龙机器人的初步设计标准为:身高1.82米,重量约80公斤,全身拥有43个自由度,配备5指灵巧手,实现了全身灵活力控与动作协调。具体到各部位,包括头部有2个自由度,即俯仰和侧摆,以对标人类;每条手臂有7个自由度;腰部有3个自由度;腿部(包括大腿和髋部)有4个自由度;每一个踝关节2个自由度;总体43个自由度。通过关节设计与自由度的优化,机器人能够实现多种复杂运动平衡控制,进而满足多种的场景需求。
下图展示了各自由度关节的运动范围设定。以腰部为例,我们设定其向后弯曲15°,向前弯曲45°。虽然人类腰部向前弯曲的角度通常大于45°,但考虑到结构设计的限制,确定了45°这一标准。这一标准既参考了人体的运动特性,又结合了实际机构的可行性和需求的考量。
2.3 功能划分与设计
下一步是依据功能划分各个模块。人形机器人硬件系统较为复杂,主要包括感知头、胸腔、腰部、双臂和腿足等部分,分系统涵盖核心零部件、旋转关节、主控系统和灵巧手等。所以要对其进行功能划分,并据此分配相应人员,对各模块进行重点设计。

2.4 行走与驱动系统设计
青龙机器人的行走系统是通过仿生力学设计,动力学仿真与多场景验证,优化了步态周期的稳定性,进而满足多种场景需求。以下以青龙人形机器人的下肢行走驱动设计为例,详细介绍其设计过程。
一、进行步态仿真分析,研究行走速度与时间的关系,以及各关节扭矩-时间关系,为后续设计提供理论依据。
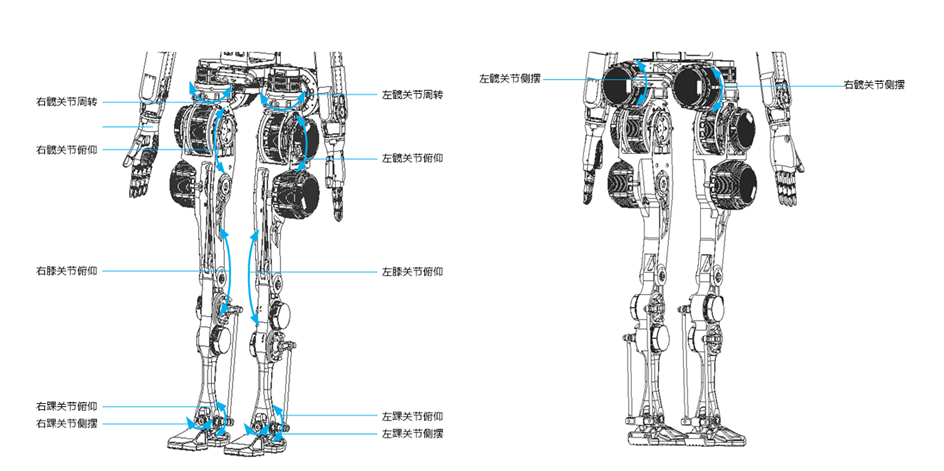
二、参考人体下肢骨骼结构,并依据国标GB/T 10000-2023中国成年人人体尺寸进行尺寸比例划分和下肢关节自由度设计。例如,青龙机器人的下肢设计包括:臀部侧展执行器实现大腿侧展,大腿周转电机,大腿侧摆执行器,膝关节执行器(安装于大腿上,通过连杆结构实现),以及小腿上的两个踝关节电机(通过连杆结构实现)。在设计中,充分考虑人体的运动实现,如膝关节不仅可俯仰,还采用关节轴承设计实现左右侧向微调;脚踝具有两个自由度(俯仰和侧摆),还能实现倾斜的角度位置,以达到拟人的结构设计效果。
三、完成整体结构设计细化后,对机器人进行行走动力学仿真,设定仿真的指标(如青龙的设计速度为8Km/h),仿真不同速度下的关节自由度需求是否满足,连杆合理性以及关节电机的扭矩、转速、功率需求,进一步确认设计的可行性。同时,对结构进行强度校核,包括前倾倒碰撞仿真分析,0.5米跳跃仿真分析,以及重点结构件的静力学仿真,以确保结构合理性。通过迭代优化,对不合理部分进行改进,减轻重量或加强结构,并在控制系统中进行最终确认。

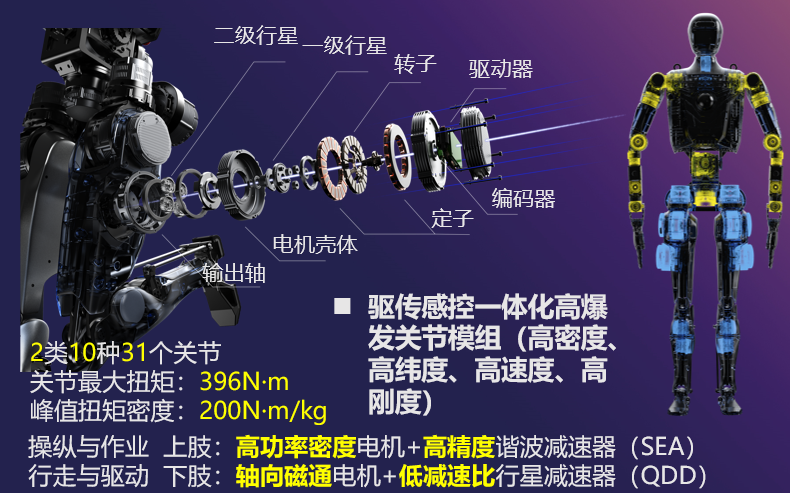
四、仿真数据为关节模组设计提供了理论依据。青龙机器人大腿关节模组采用4种共12个关节,主要设计为轴向磁通电机搭配低减速比行星减速器,这种设计使体积小巧且能输出高扭矩和高转速。其中腿部前摆和膝关节扭矩最大,关节最大扭矩达396N·m,峰值扭矩密度200N·m/kg,采用驱传感控一体化高爆发关节模组(包含了电机、减速器、驱动器还有编码器),具备高密度、高精度、高速度和高刚度的特点。
五、进行集成与验证测试,通过测试结果验证结构合理性,并考虑设计的可制造性、可维护性及成本等因素进行迭代优化,最终形成可用于量产的青龙设计。
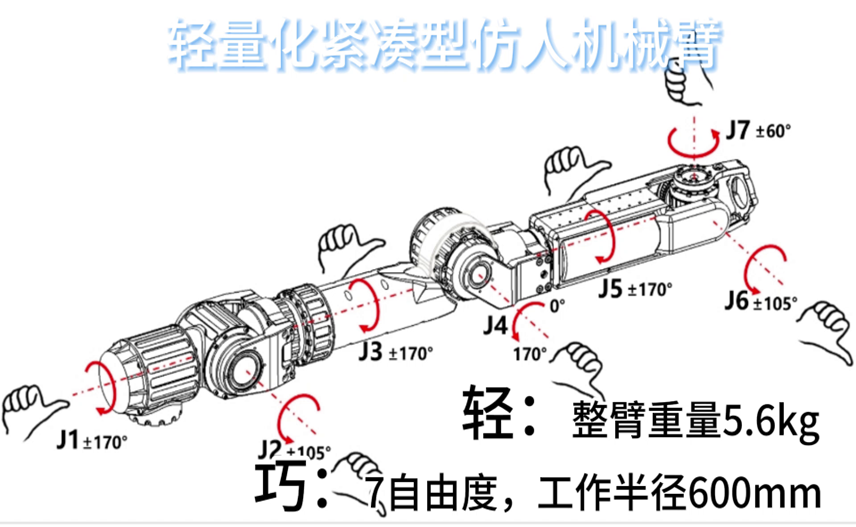
2.5 操纵与作业系统设计
以上是腿足系统的设计过程,下面简要介绍青龙机器人的上肢操作系统设计。青龙的上肢是一个7自由度的机械臂,工作半径超600mm,整臂重量仅5.6公斤,实现了轻量化设计,尺寸和自由度均对标人体。机械臂末端可搭载5指灵巧手,每只手拥有6个主动自由度,大拇指关节有2个自由度,其余关节各1个自由度,共19个关节,重量550g。指尖和手掌配备了多阵列触觉传感器,抓取时可通过算法实时感知抓取力度。
颈部采用轴向磁通电机搭配低减速比行星减速器(QDD)设计,最大扭矩26Nm。上肢则采用高功率密度电机搭配高精度谐波减速器(SEA)设计,这是手臂关节的常见设计构型。腰部同样采用高功率密度电机搭配高精度谐波减速器(SEA)设计,腰部侧摆/俯仰扭矩可达315Nm。

2.6 能源动力系统设计
能源动力系统设计方面,选用了三元锂电池。众所周知,三元锂电池相较于磷酸铁锂电池,在能量密度上更具优势。鉴于人形机器人需外出行走作业,对轻量化有较高要求,我们最终确定采用三元锂电池方案。该电池最大容量为30Ah,能够满足续航两小时的设计需求,最大放电电流可达120A。同时,还将配备相应的电源管理系统和供配电系统。
2.7 感知与控制系统设计
在控制与感知模块方面,控制系统采用了多主站实时同步高速EC总线系统,依据功能属性进行模块化管理,上肢作业和下肢作业独立运行。此外,实施多主站高速实时通信机制,确保各节点稳定通信。并通过智能任务调度及多核架构实时调度,充分挖掘硬件潜力,可支持33个从站实时同步控制。
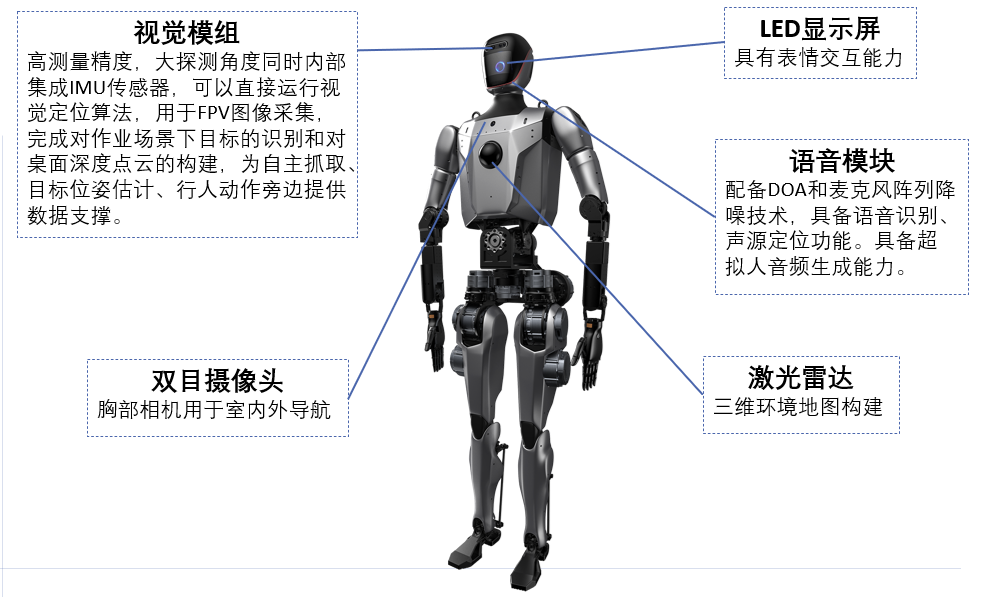
感知模块分为两部分:感知头和胸部。胸部配备双目相机与激光雷达,双目相机用于视觉导航,激光雷达负责三维环境构建。感知头则包含视觉模块、语音模块和LED显示屏三个模块。视觉模块具备高测量精度和大探测角度,内置IMU传感器,可直接运行视觉定位算法,用于FPV图像采集,实现作业场景下目标识别和桌面深度点云构建,为自主抓取、目标位姿估计、行人动作识别等提供数据支持。
青龙机器人硬件平台最终设计实现的指标是,身高1.88米,体重95公斤。设计初期目标最大速度为8公里/小时,经测试,实际速度可达10公里/小时。还进行了手臂协同下蹲动作的测试,下面相关视频可展示测试情况。
3、人形机器人硬件技术探讨
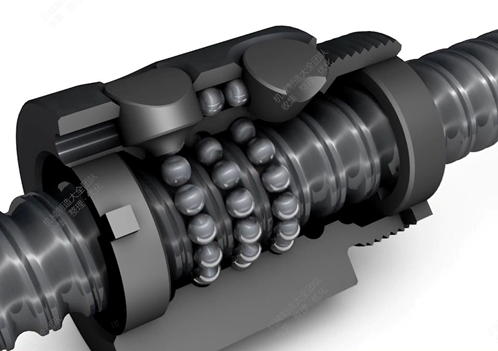
3.1 滚柱丝杠和滚珠丝杠的优劣势对比
电机+滚柱丝杠
优势:高负载能力、耐冲击
劣势:制造难度大、成本高
未来应用趋势:需要高负载和冲击的位置,如腿部、腰部关节,和大负载机器人
电机+滚珠丝杠
优势:低摩擦效率更高、制造工艺成熟、成本低
劣势:负载能力偏低、耐冲击能力差
未来应用趋势:小负载位置,如手臂、手腕关节,或低负载机器人

3.2 直线关节的优劣势分析
相对旋转关节,直线关节在性能、成本、可制造性/可维护性、应用场景等方面的优劣势如下:
| 优点 | 缺点 | |
| 性能 | 1.高精度直线运动,刚度好;2.耐冲击能力强,更稳定;3.能量效率高;4.高负载能力;5.空间利用率高;6.末端加力矩传感器,可以直接检测螺杆的负载,实现更精确力控;7.腿部使用直线关节可以将质心向上移动,手臂使用直线关节可以将质心向内移动,一方面提升提高整机质心,另一方面减轻四肢的运动惯量,从而提升整机稳定性、提升整机的运控表现 | 1.速度低 |
| 应用场景 | 1.广泛应用于需要直线运动的场景,如机器人手臂、腿部。旋转角度不大,高负载位置,如双腿和双臂。2.在精密装配、物料搬运等任务中,直线关节的高精度和高负载能力得到了充分发挥; | 1.自由度运动范围要求不高的部位;2.高扭矩关节处; |
| 成本 | / | 1.成本偏高,包含丝杠等复杂传动装置,加工工艺复杂 |
| 可制造性 可维护性 | / | 1.制造工艺不成熟,制造成本高;2.旋转关节主要为电机和减速器,工艺相对成熟而且维护简单。 |
线下分享会的最后技术老师与观众进行了热烈的讨论,开源社区为大家提供了一个开放交流的平台,共同探讨硬件平台设计的难点与创新点。最后希望大家加入 OpenLoong 开源社区,关注 OpenLoong 项目,期待更多开发者加入硬件开发平台,进行后续交流和技术共享。
1、点击链接下载演讲PDF 青龙全尺寸通用人形机器人硬件平台设计 - 硬件设计 开发者论坛 - OpenLoong
2、演讲视频请访问OpenLoong 开源社区Bilibili视频账号:OpenLoong开源社区的个人空间-OpenLoong开源社区个人主页-哔哩哔哩视频
OpenLoong开源社区介绍
“OpenLoong”是一个全球领先的综合性人形机器人开源社区。社区秉持着技术驱动和开放透明的价值观,致力于汇聚全球开发者,共同推动人形机器人产业的发展,为全球人形机器人产业赋能。
我们的使命是通过在机器人本体技术、平台软件、具身智能、具身数据集以及上层应用等多个方面做出重大贡献,从而推动整个产业的进步。
注册成为 OpenLoong 开源社区的一员,与机器人研究者和爱好者共同开启人形机器人探索之旅!
注册地址:OpenLoong

















 9419
9419

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









