







导语:本文将深入探讨人形机器人硬件平台的关键技术、产业链与核心部件以及降低成本的策略。从硬件平台的核心技术,到机器人核心零部件的详细介绍,再到产业链各环节的协同发展以及实现低成本化的创新思路,将一同剖析人形机器人迈向广泛应用所面临的挑战与机遇,展望其未来的发展趋势,为开发者和相关从业者提供一些参考与启示。
(文末附有PDF下载链接哦~)
1、人形机器人硬件平台的关键技术
人形机器人关键技术包括机器人脑、躯体、肢体三大核心技术协同发展,围绕这三大核心技术,以具身智能赋能人形机器人为核心,实现通用人形机器人体能、技能、和智能提升的相关技术,提升学习、作业、运动能力,推动通用型人形机器人从精细操作到复杂任务的全面适应,实现智能化与通用化突破。

1.1 机器体
人形机器人的机器体技术通过仿生映射、机构拓扑和集成优化,结合旋转执行器与直线执行器这两种核心组件,实现了结构与功能一体化集成,研制出高动态、高承载、强仿生的人形机器人。此外,机器体以对标生物人类为目标,通过轻量化高承载主体结构、高爆发执行器(包括旋转关节和直线关节)、交变强适应动力系统及多维环境感知能力,实现稳定可靠的人形机器人硬件设计与集成优化。
另外,续航能力是目前人形机器人的短板。机器人续航能力还逊色于人,所以长续航动力系统是未来重点研发方向。除了爆发能力和续航能力,也希望机器人像人类一样具备触觉、听觉、视觉、嗅觉等多维环境感知能力,形成稳健可靠的人形机器人机器体设计。
1.2 机器肢
机器肢,包括手臂和腿部,研究重点是构建高实时、高稳健的伺服控制系统,让机器人能被动和主动感知当前关节姿态,就像人能感知自己站立时的姿态,操作物体时也能感知手臂动作。通过设计轻量化与灵巧仿生腿足,提升行走驱动与环境适应能力,结合精准操作与交互性能,构建高实时性和稳定性的控制系统,实现高效可靠的人形机器人肢体功能。

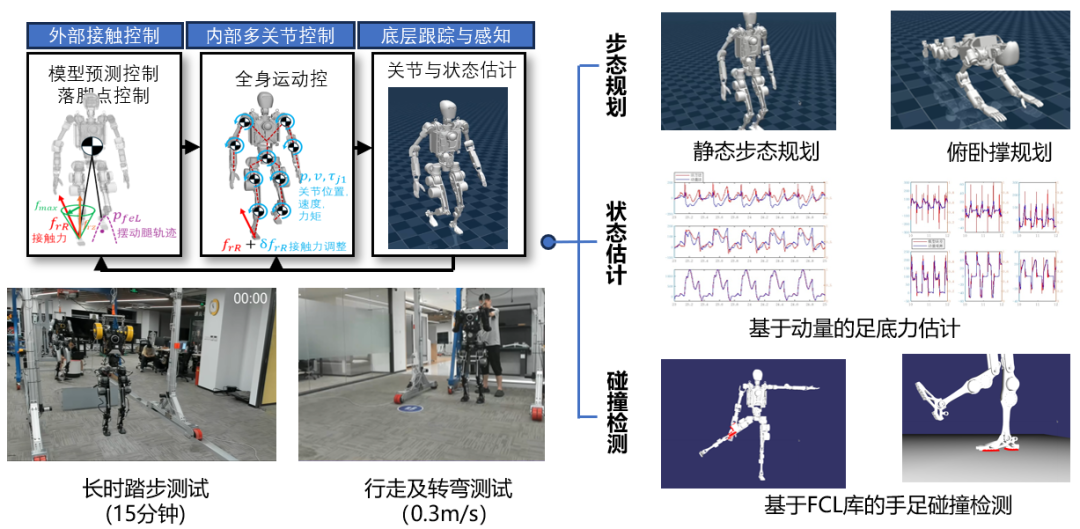
1.3 机器脑
机器脑通过外部接触控制与内部多关节控制结合,基于足底力估计实现步态规划与状态估计,优化碰撞检测与行走测试,构建高效精确的机器人脑控制系统,提升动态运动和复杂环境适应能力。
目前,国地中心正逐步建立机器人的训练数据库。例如,大家期望机器人未来能帮忙叠衣服、洗衣服、拖地、扔垃圾、取外卖等,这就需要采集相关数据,让机器人知晓其未来工作内容。同时,这些工作还需具备较强泛化能力,像叠衣服任务,要能应对普通衬衫、羽绒服或床单等不同物品。泛化能力是后续训练场与数据集的关键内容。
机器人的训练主要有两种方式:一是训练机器人做什么,二是观察人类在做什么。以特斯拉的Optimus机器人为例,特斯拉建立了规模化人形机器人训练场,实现数据收集与训练工作的规模化,通过道场训练创新技术路径,结合视觉与触觉神经网络驱动,达成高效数据采集与作业能力提升。再如Figure 01机器人,Figure AI利用端到端人工智能系统,在10小时内通过观察完成咖啡制作训练,借助神经网络精准输出操作轨迹,从而推动机器人的智能化与工业化落地。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1226
1226

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









