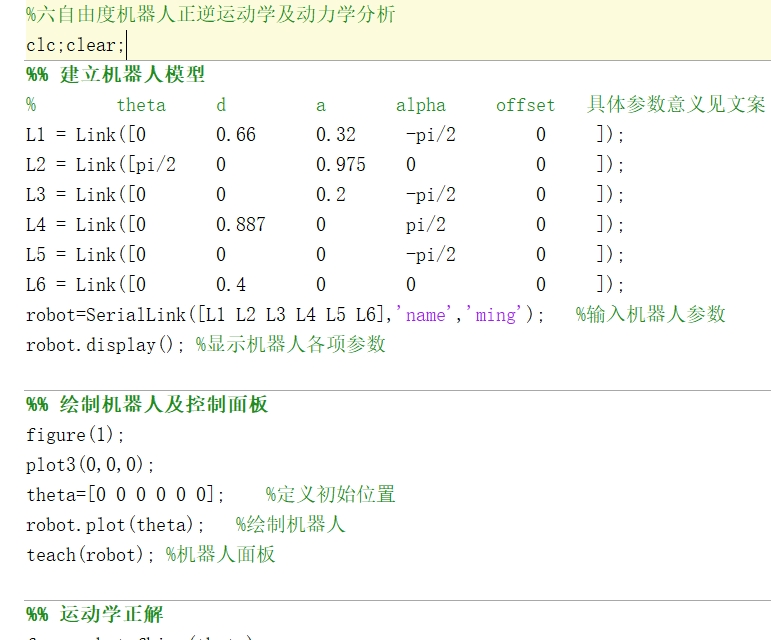
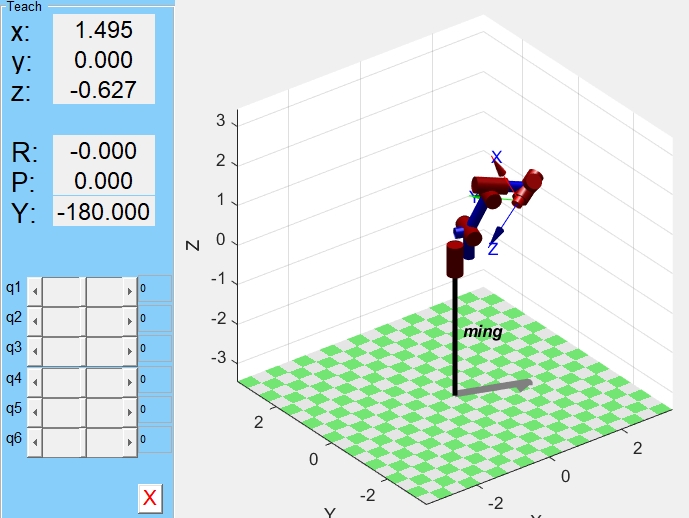
这里提供一个基于MATLAB键盘控制的六阶自由度机械臂仿真的代码实现示例。该示例使用MATLAB自带的Robotics Toolbox进行机械臂建模和控制。
首先,需要定义机械臂的DH参数和关节限制:
```matlab
% DH参数定义
L1 = Link('d',0.2755,'a',0,'alpha',pi/2);
L2 = Link('d',0,'a',0.41,'alpha',0);
L3 = Link('d',0,'a',0.375,'alpha',0);
L4 = Link('d',0.02,'a',0,'alpha',pi/2);
L5 = Link('d',0,'a',0,'alpha',-pi/2);
L6 = Link('d',0.085,'a',0,'alpha',0);
% 关节限制
q1_range = [-170, 170]*pi/180;
q2_range = [-120, 120]*pi/180;
q3_range = [-170, 170]*pi/180;
q4_range = [-190, 190]*pi/180;
q5_range = [-115, 115]*pi/180;
q6_range = [-360, 360]*pi/180;
```
然后,定义机械臂的模型:
```matlab
% 定义机械臂模型
robot = SerialLink([L1 L2 L3 L4 L5 L6], 'name', 'my_robot');
robot.tool = transl(0, 0, 0.15);
```
接着,定义键盘控制函数,可以通过键盘控制机械臂的运动:
```matlab
% 定义键盘控制函数
function keyboardControl(~,event)
switch event.Key
% 控制第1个关节
case 'q'
q(1) = q(1) + 0.1;
case 'a'
q(1) = q(1) - 0.1;
% 控制第2个关节
case 'w'
q(2) = q(2) + 0.1;
case 's'
q(2) = q(2) - 0.1;
% 控制第3个关节
case 'e'
q(3) = q(3) + 0.1;
case 'd'
q(3) = q(3) - 0.1;
% 控制第4个关节
case 'r'
q(4) = q(4) + 0.1;
case 'f'
q(4) = q(4) - 0.1;
% 控制第5个关节
case 't'
q(5) = q(5) + 0.1;
case 'g'
q(5) = q(5) - 0.1;
% 控制第6个关节
case 'y'
q(6) = q(6) + 0.1;
case 'h'
q(6) = q(6) - 0.1;
end
% 关节限制
q = max(q, [q1_range(1), q2_range(1), q3_range(1), q4_range(1), q5_range(1), q6_range(1)]);
q = min(q, [q1_range(2), q2_range(2), q3_range(2), q4_range(2), q5_range(2), q6_range(2)]);
% 更新机械臂姿态
robot.animate(q);
end
```
最后,启动键盘控制界面:
```matlab
% 初始化关节角度
q = zeros(1, 6);
% 启动键盘控制界面
f = figure('KeyPressFcn', @keyboardControl);
% 显示机械臂模型
robot.plot(q);
```
这样,就可以通过键盘控制机械臂的运动了。完整的代码实现示例如下:
```matlab
% DH参数定义
L1 = Link('d',0.2755,'a',0,'alpha',pi/2);
L2 = Link('d',0,'a',0.41,'alpha',0);
L3 = Link('d',0,'a',0.375,'alpha',0);
L4 = Link('d',0.02,'a',0,'alpha',pi/2);
L5 = Link('d',0,'a',0,'alpha',-pi/2);
L6 = Link('d',0.085,'a',0,'alpha',0);
% 关节限制
q1_range = [-170, 170]*pi/180;
q2_range = [-120, 120]*pi/180;
q3_range = [-170, 170]*pi/180;
q4_range = [-190, 190]*pi/180;
q5_range = [-115, 115]*pi/180;
q6_range = [-360, 360]*pi/180;
% 定义机械臂模型
robot = SerialLink([L1 L2 L3 L4 L5 L6], 'name', 'my_robot');
robot.tool = transl(0, 0, 0.15);
% 定义键盘控制函数
function keyboardControl(~,event)
switch event.Key
% 控制第1个关节
case 'q'
q(1) = q(1) + 0.1;
case 'a'
q(1) = q(1) - 0.1;
% 控制第2个关节
case 'w'
q(2) = q(2) + 0.1;
case 's'
q(2) = q(2) - 0.1;
% 控制第3个关节
case 'e'
q(3) = q(3) + 0.1;
case 'd'
q(3) = q(3) - 0.1;
% 控制第4个关节
case 'r'
q(4) = q(4) + 0.1;
case 'f'
q(4) = q(4) - 0.1;
% 控制第5个关节
case 't'
q(5) = q(5) + 0.1;
case 'g'
q(5) = q(5) - 0.1;
% 控制第6个关节
case 'y'
q(6) = q(6) + 0.1;
case 'h'
q(6) = q(6) - 0.1;
end
% 关节限制
q = max(q, [q1_range(1), q2_range(1), q3_range(1), q4_range(1), q5_range(1), q6_range(1)]);
q = min(q, [q1_range(2), q2_range(2), q3_range(2), q4_range(2), q5_range(2), q6_range(2)]);
% 更新机械臂姿态
robot.animate(q);
end
% 初始化关节角度
q = zeros(1, 6);
% 启动键盘控制界面
f = figure('KeyPressFcn', @keyboardControl);
% 显示机械臂模型
robot.plot(q);
```






















 1955
1955

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









