






无人驾驶车辆基于双pid和lqr的纵横向联合控制,跟踪五次多项式,纵向控制上帮你制作了标定表并保存,无需自己去跑数据得到电机或发动机的标定数据,,carsim19版本
ID:9550680109303164
规控算法工程师
无人驾驶车辆是当前科技领域最具前景和潜力的技术之一。它将人工智能、传感器技术、自动控制等多个领域有机融合,通过高精度地感知环境信息、实时做出决策与控制,实现了车辆的自主驾驶。而在实现无人驾驶的过程中,控制算法的设计和优化是至关重要的一环。
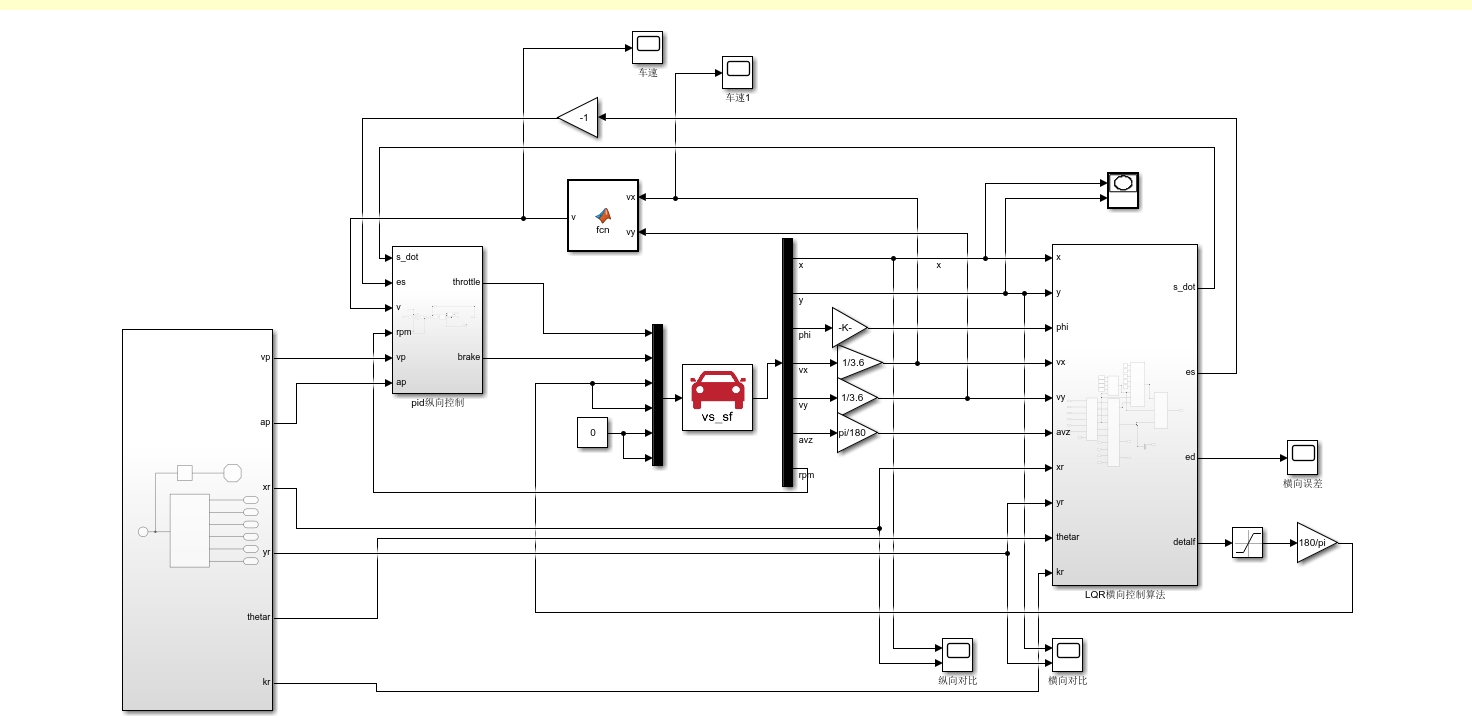
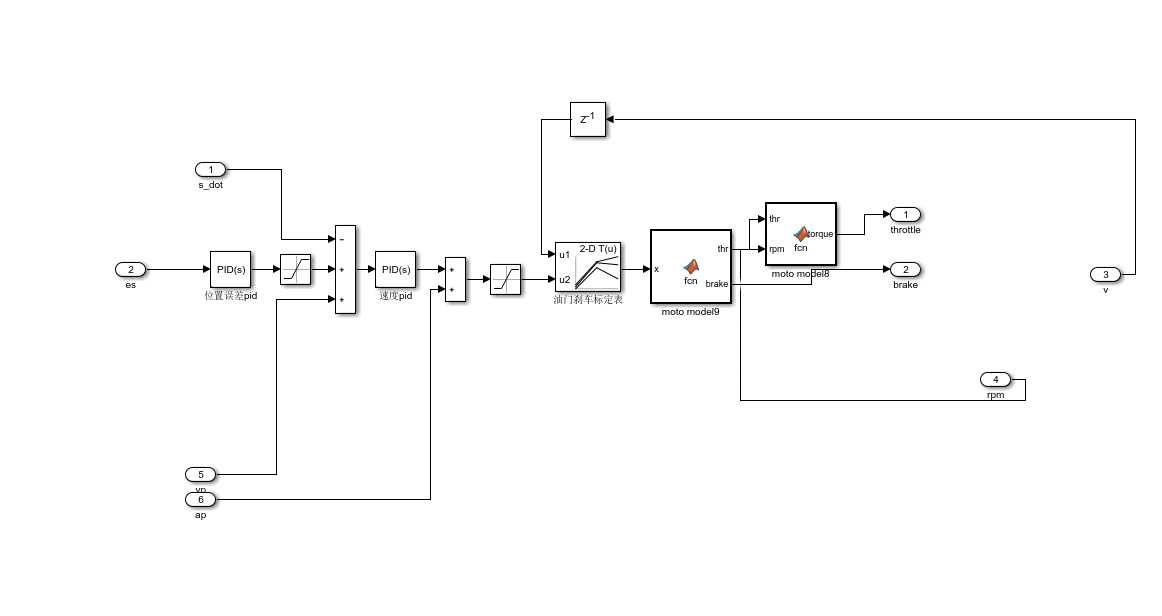
本文将围绕无人驾驶车辆基于双PID和LQR的纵横向联合控制展开讨论。为了实现对车辆的精确控制,我们考虑了纵横向控制的相关因素,使用双PID和LQR控制算法进行联合控制。在纵向控制方面,我们根据五次多项式生成了参考轨迹来指导车辆的运动,通过与实际轨迹的匹配,实现对车辆速度和加速度的控制。同时,我们在纵向控制上制作了标定表,并保存了相应数据,以方便无需自己去跑数据得到电机或发动机的标定数据。这一步骤的引入进一步简化了纵向控制的过程,提高了系统的实用性和可操作性。
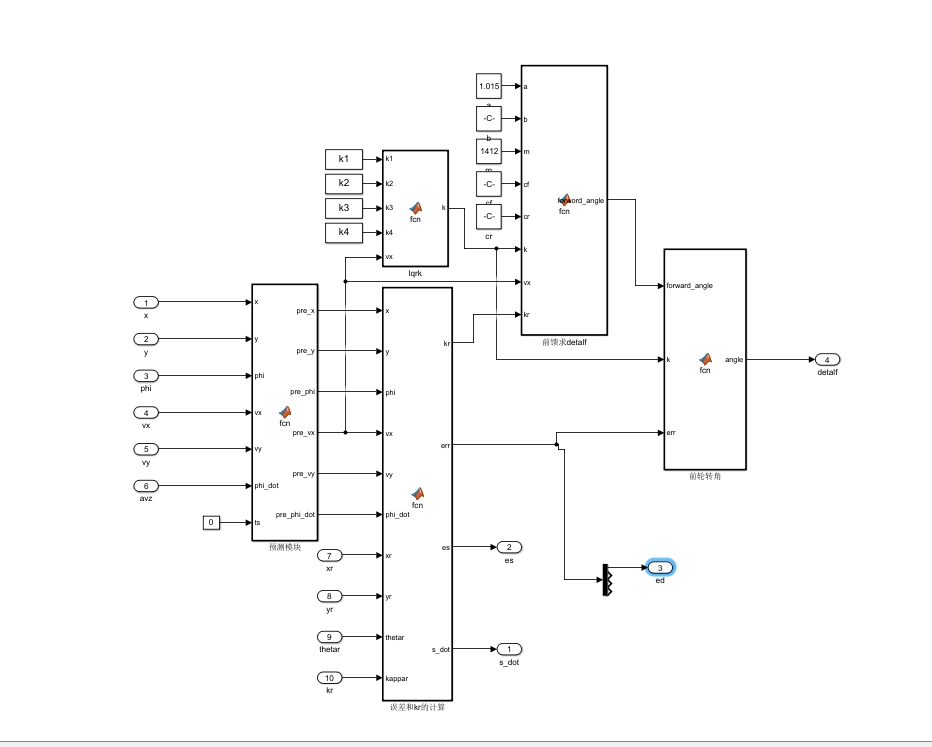
在横向控制方面,我们使用LQR控制算法来实现车辆的姿态调整和轨迹跟踪。LQR控制算法是一种基于状态反馈的优化控制方法,通过对车辆模型进行线性化处理,构建控制系统的状态空间模型,进而求解出最优的控制器参数。通过与车辆的姿态反馈信息进行比较和调整,实现车辆行驶状态的稳定和精确控制。
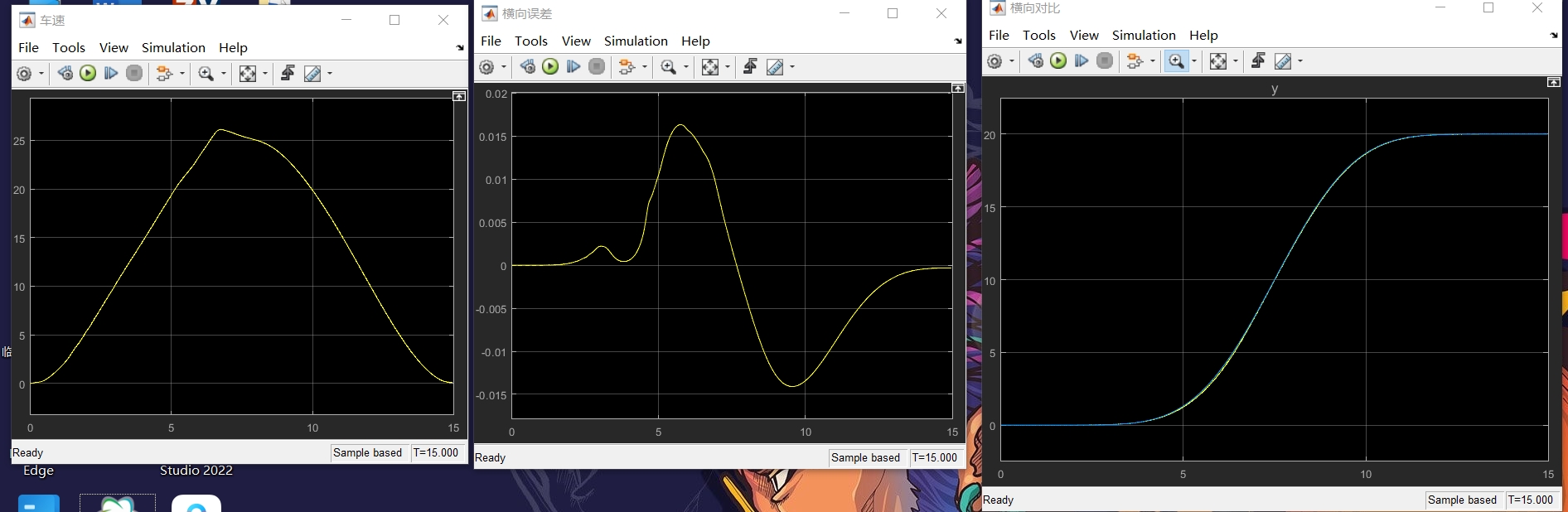
此外,我们还使用了CARSim19版本进行仿真实验,以验证我们提出的双PID和LQR控制算法的有效性和可行性。通过对不同情景下的车辆行驶进行模拟,我们得出了一系列结论和数据分析,进一步证明了我们所提出的控制算法的优越性和适用性。
综上所述,本文围绕无人驾驶车辆基于双PID和LQR的纵横向联合控制展开了深入的讨论。我们通过纵向控制的标定表和五次多项式,以及横向控制的LQR算法,实现了对车辆的精确控制和轨迹跟踪。通过CARSim19版本的仿真实验,我们进一步验证了所提出的控制算法的有效性和可行性。相信本文所提出的方法和思路,将为无人驾驶车辆的控制领域提供有益的参考和启示。
相关的代码,程序地址如下:http://matup.cn/680109303164.html
















 443
443

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









