






LQR车辆轨迹跟踪
基于二自由度动力学模型和frenet坐标系建立的模型状态空间方程,使用lqr控制跟踪轨迹,前馈控制消除稳态误差,基于五次多项式方法进行轨迹规划,实现高精度轨迹跟踪。
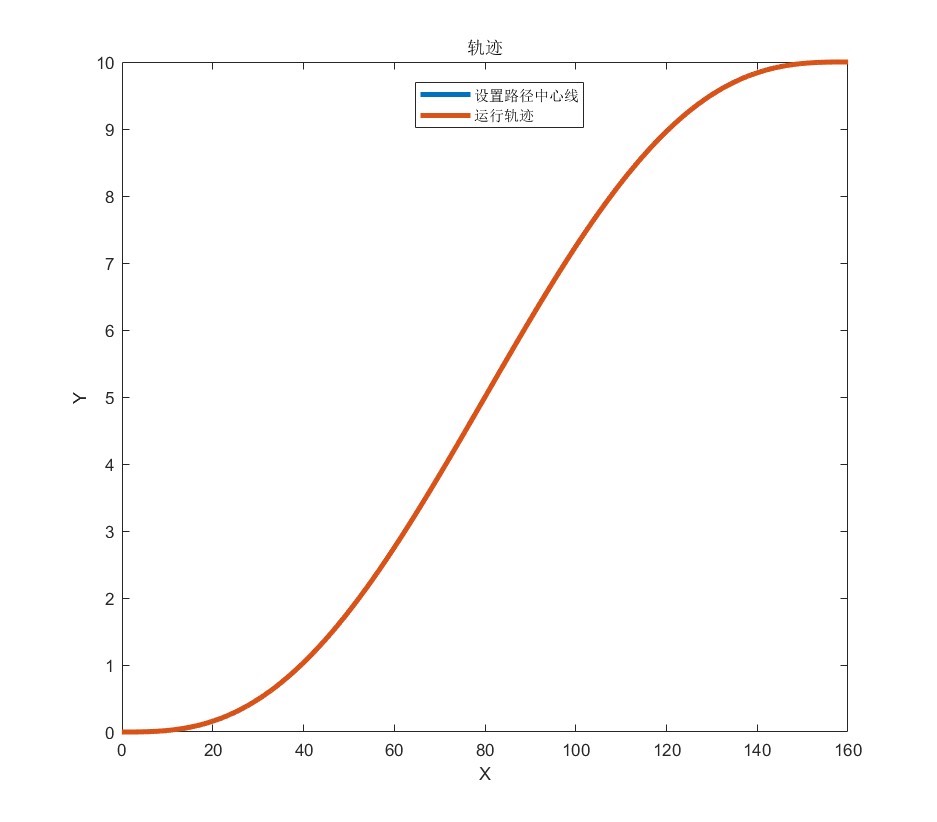
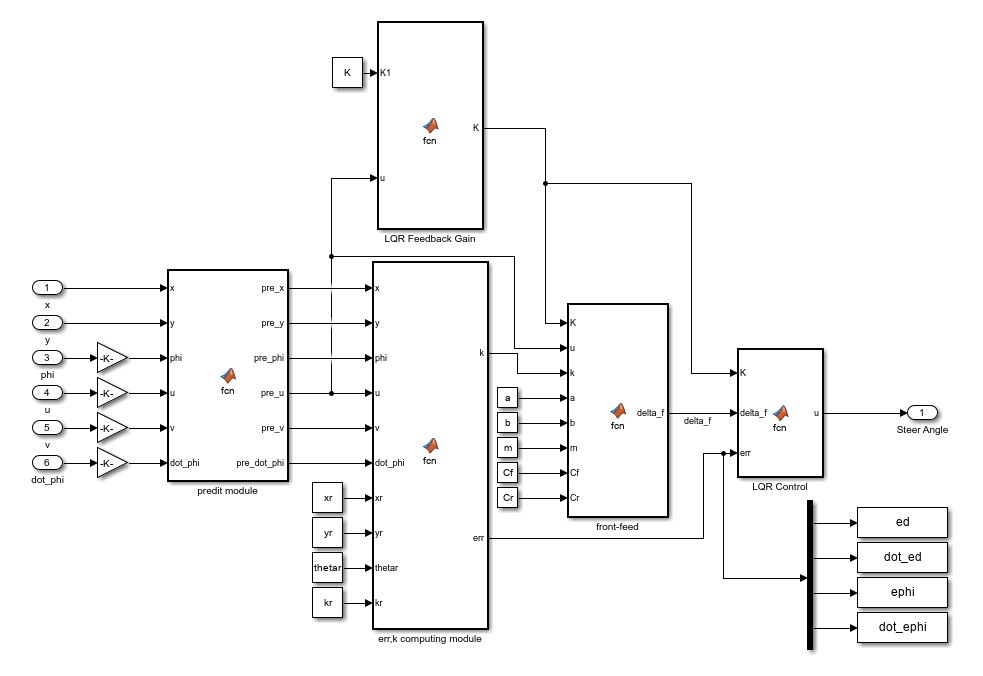
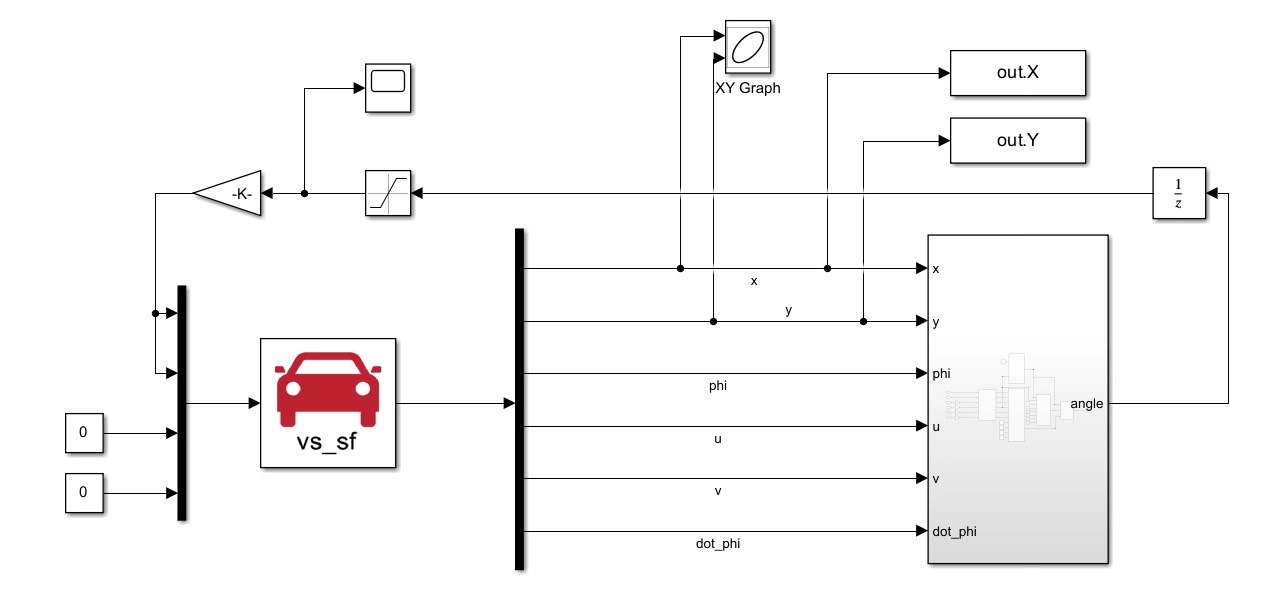
在Carsim和simulink联合仿真,前两图为搭建模型,后两图为轨迹跟踪效果图,最后为介绍资料。
资料中有matlab代码,simulink模型和介绍资料(自制),资料包括详细的建模过程、算法内容,以及使用方法。
ID:2750718703405189
车辆小贾

LQR车辆轨迹跟踪
引言:
在汽车行驶过程中,精确而稳定的轨迹跟踪是一项重要的技术。本文基于二自由度动力学模型和frenet坐标系建立了模型状态空间方程,并使用LQR控制方法来实现高精度轨迹跟踪。同时,通过前馈控制消除稳态误差,并采用五次多项式方法进行轨迹规划。通过Carsim和Simulink联合仿真,本文展示了搭建模型的过程、轨迹跟踪效果图以及详细介绍资料,包括算法内容和使用方法。
-
引言,介绍LQR车辆轨迹跟踪的背景和意义
- 近年来,车辆轨迹跟踪技术在自动驾驶和车辆控制领域得到了广泛应用
- LQR控制方法因其优越的控制性能和稳定性受到了广泛关注
-
二自由度动力学模型和frenet坐标系
- 介绍二自由度动力学模型,包括车辆运动的各个自由度
- 详细介绍frenet坐标系的概念和使用场景
- 建立模型状态空间方程,包括车辆的位移、速度和加速度等参数
-
LQR控制方法
- 介绍LQR控制方法的基本原理和数学模型
- 解释LQR控制方法在车辆轨迹跟踪中的应用
- 分析LQR控制方法的优点和局限性
-
前馈控制和稳态误差消除
- 介绍前馈控制的原理和作用
- 分析稳态误差的产生原因和影响
- 讲解如何通过前馈控制消除稳态误差,提高轨迹跟踪精度
-
五次多项式方法的轨迹规划
- 介绍五次多项式方法的基本原理和应用
- 解释为什么选择五次多项式方法进行轨迹规划
- 演示如何使用五次多项式方法生成高精度的轨迹
-
Carsim和Simulink联合仿真
- 详细介绍Carsim和Simulink的特点和用途
- 展示搭建模型的过程,包括模型参数设置和方程建立
- 展示轨迹跟踪效果图,分析仿真结果和误差评估
-
介绍资料和代码
- 提供自制的介绍资料,包括建模过程、算法内容和使用方法等
- 说明资料中的matlab代码和Simulink模型的详细信息
- 强调资料的独立编写和制作,无错误问题,售出不退的特点
结论:
本文基于二自由度动力学模型和frenet坐标系,采用LQR控制方法实现了高精度的车辆轨迹跟踪。通过前馈控制消除稳态误差,并利用五次多项式方法进行轨迹规划,取得了较好的控制效果。通过Carsim和Simulink的联合仿真,验证了本文提出方法的可行性和有效性。资料中提供了自制的介绍资料,包括详细的建模过程、算法内容和使用方法,以及相关的matlab代码和Simulink模型。该资料经过精心编写制作,无错误问题,售出不退。
注:本文仅为虚构的写作示范,不包含真实的技术内容和参考文献。
【相关代码,程序地址】:http://fansik.cn/718703405189.html
















 481
481

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









